Você também pode gostar
- Liebert Gxt5 3000 10000kva Brochure SL 70505Documento12 páginasLiebert Gxt5 3000 10000kva Brochure SL 70505Julián Jair Cadena SánchezAinda não há avaliações
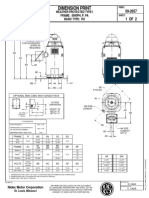
- Dimension Print: Weather Protected Type I FRAME: 5000PH, P, PA Basic Type: RuDocumento2 páginasDimension Print: Weather Protected Type I FRAME: 5000PH, P, PA Basic Type: RuJulián Jair Cadena SánchezAinda não há avaliações
- Vdocuments - MX Limitorque Actuation MX Series Electric Actuator and WTR Series Worm Gear OperatorDocumento35 páginasVdocuments - MX Limitorque Actuation MX Series Electric Actuator and WTR Series Worm Gear OperatorJulián Jair Cadena SánchezAinda não há avaliações
- Power Correlation For Anchor and Helical Ribbon Impellers in Highly Viscous LiquidsDocumento4 páginasPower Correlation For Anchor and Helical Ribbon Impellers in Highly Viscous LiquidsJulián Jair Cadena Sánchez100% (1)
- ASME Steam Tables - Compact Edition-American Society of Mechanical Engineers (2006)Documento32 páginasASME Steam Tables - Compact Edition-American Society of Mechanical Engineers (2006)Jesús CbAinda não há avaliações
- AMTED109015EN Web PDFDocumento28 páginasAMTED109015EN Web PDFJulián Jair Cadena SánchezAinda não há avaliações
- HelicalRibbonPaper Issue6 Clean PDFDocumento50 páginasHelicalRibbonPaper Issue6 Clean PDFJulián Jair Cadena SánchezAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Licensure Examination For Teachers General Education Drill IiiDocumento5 páginasLicensure Examination For Teachers General Education Drill IiiDennis Nabor Muñoz, RN,RMAinda não há avaliações
- Rock Identification Using Deep Learning CNN Project Report: AbstractDocumento12 páginasRock Identification Using Deep Learning CNN Project Report: AbstractAnantha PriyaAinda não há avaliações
- Green and Pink Nature Watercolor Botanical Garden Spring Field TripDocumento15 páginasGreen and Pink Nature Watercolor Botanical Garden Spring Field Tripbaitur rohmahAinda não há avaliações
- Instagram Creators Handbook - IGTV PDFDocumento48 páginasInstagram Creators Handbook - IGTV PDFAndrei NeațuAinda não há avaliações
- 10CS661 - Operations Research - BE (CSE) - Unit1Documento108 páginas10CS661 - Operations Research - BE (CSE) - Unit1Krishna MurthyAinda não há avaliações
- SIC CodeDocumento424 páginasSIC CodeZohra MerchantAinda não há avaliações
- Section 1 - Paperi-General Knowledge and Current Affairs: Set Id: 53449 - 6Documento19 páginasSection 1 - Paperi-General Knowledge and Current Affairs: Set Id: 53449 - 6babluAinda não há avaliações
- OtisDocumento3 páginasOtisscarivinAinda não há avaliações
- C++ NotesDocumento141 páginasC++ NotesSharfuddin ZishanAinda não há avaliações
- Apple Pro Training SeriesDocumento2 páginasApple Pro Training Seriesmasterkira101Ainda não há avaliações
- Machine Drawing Problem SheetDocumento1 páginaMachine Drawing Problem SheetDeepak Gupta VlogsAinda não há avaliações
- Element Description Team CharterDocumento2 páginasElement Description Team CharterPRASHANT GUPTAAinda não há avaliações
- Business IntelligenceDocumento141 páginasBusiness IntelligenceKhubaibAhmedAinda não há avaliações
- Datasheet XPG Gammix d30 ddr4 Memory Module 20210517Documento3 páginasDatasheet XPG Gammix d30 ddr4 Memory Module 20210517Ijal RijalAinda não há avaliações
- Basic BIM Framework With ArchiCADDocumento27 páginasBasic BIM Framework With ArchiCADHendikAinda não há avaliações
- History - 1st Generation (1G) SystemsDocumento16 páginasHistory - 1st Generation (1G) SystemsAnto RaddeAinda não há avaliações
- 3GPP TS 38.533Documento10 páginas3GPP TS 38.533AhmedMa'moonAinda não há avaliações
- Manual Olt PDFDocumento51 páginasManual Olt PDFValdei JuniorAinda não há avaliações
- Microservice Spring BootDocumento707 páginasMicroservice Spring BootOliver Raileanu100% (1)
- Sas 21Documento2 páginasSas 21Sistine Rose LabajoAinda não há avaliações
- GLS-LS40GW Specification 20200902Documento5 páginasGLS-LS40GW Specification 20200902houyamelkandoussiAinda não há avaliações
- Anna University SyllabusDocumento112 páginasAnna University SyllabusChitra KaruppiahAinda não há avaliações
- Networking in DMRCDocumento16 páginasNetworking in DMRCaanchalbahl62100% (1)
- Hidden Secret Codes For Google Android Mobile Phones - AskVGDocumento5 páginasHidden Secret Codes For Google Android Mobile Phones - AskVGTrungVũNguyễnAinda não há avaliações
- Technology Plan and Infrastruture Support System - Css - NciiDocumento8 páginasTechnology Plan and Infrastruture Support System - Css - NciiSanie BautistaAinda não há avaliações
- NF79115240802810 ETicket-1Documento3 páginasNF79115240802810 ETicket-1Aftab AlamAinda não há avaliações
- Why EagleBurgmann 29.03.2011Documento15 páginasWhy EagleBurgmann 29.03.2011ybozbasAinda não há avaliações
- Retro Internet Interface Personal Organizer For College by SlidesgoDocumento55 páginasRetro Internet Interface Personal Organizer For College by SlidesgoAhda BayaniAinda não há avaliações
- Staffing Coordinator ResumeDocumento7 páginasStaffing Coordinator Resumekpcvpkjbf100% (2)
- Algebra WorkbookDocumento260 páginasAlgebra Workbookbannerpercussion100% (6)