Escolar Documentos
Profissional Documentos
Cultura Documentos
Manual Phenix Base
Enviado por
Emerson De Andrade LimaDireitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Manual Phenix Base
Enviado por
Emerson De Andrade LimaDireitos autorais:
Formatos disponíveis
IL ETH BK DI8 DO4 2TX-PAC
Modbus/TCP(UDP) bus coupler,
8 inputs, 24 V DC,
4 outputs, 24 V DC, 500 mA
Data sheet
7275_en_05 PHOENIX CONTACT 2012-09-19
1 Description
The bus coupler is the link between an Ethernet network and Process data access via XML
the Inline installation system. Ethernet TCP/IP
Up to 61 Inline devices can be connected at any point to an Management via SNMP
existing Ethernet network using the bus coupler. The bus Integrated web server
coupler and the Inline devices form one station with a IP address setting via BootP (can be switched off)
maximum of 63 local bus devices. Here, the inputs and
Automatic baud rate detection on the local bus
outputs of the bus coupler together form the first and second
(500 kbps or 2 Mbps)
local bus devices.
Diagnostic and status LEDs
Up to 16 PCP devices can be operated on the bus coupler.
Eight digital inputs
Features Four digital outputs
2 x Ethernet twisted pair according to 802.3 with
auto negotiation and auto crossover connected via
an integrated 3-port switch (2 external ports, 1 internal
port)
Transmission speeds of 10 Mbps and 100 Mbps
Ethernet connection via 8-pos. RJ45 female connector
Electrical isolation of Ethernet interface and logic
Software interface: Modbus/TCP, Modbus/UDP or DDI
(Device Driver Interface)
WARNING: Explosion hazard when used in potentially explosive areas
When using the terminal in potentially explosive areas, observe the corresponding notes on page 11.
This data sheet is only valid in association with the IL SYS INST UM E user manual.
Make sure you always use the latest documentation.
It can be downloaded at www.phoenixcontact.net/catalog.
IL ETH BK DI8 DO4 2TX-PAC
Table of contents
1 Description.................................................................................................................................. 1
2 Ordering data.............................................................................................................................. 3
3 Technical data ............................................................................................................................ 4
4 Basic circuit diagram................................................................................................................... 7
5 Local diagnostic and status indicators ........................................................................................ 8
6 Reset button ............................................................................................................................... 9
7 Connecting Ethernet, power supply, actuators, and sensors ...................................................... 9
8 Notes on using the terminal in potentially explosive areas .........................................................11
9 Startup .......................................................................................................................................12
10 Web-Based Management (WBM)..............................................................................................13
11 Startup behavior of the bus coupler ...........................................................................................18
12 Monitoring functions ..................................................................................................................20
13 Modbus protocol........................................................................................................................23
14 Modbus/TCP PCP registers.......................................................................................................30
15 Device Driver Interface (DDI) .....................................................................................................31
16 Firmware services......................................................................................................................32
17 PCP communication ..................................................................................................................33
18 Simple Network Management Protocol - SNMP ........................................................................34
7275_en_05 PHOENIX CONTACT 2
IL ETH BK DI8 DO4 2TX-PAC
2 Ordering data
Description Type Order No. Pcs. / Pkt.
Modbus/TCP(UDP) bus coupler, 8 inputs, 24 V DC, 4 outputs, 24 V DC, IL ETH BK DI8 DO4 2TX-PAC 2703981 1
500 mA, complete with I/O connectors
Accessories Type Order No. Pcs. / Pkt.
Snap-on end bracket, for 35 mm NS 35/7.5 or NS 35/15 DIN rail, can be fit- CLIPFIX 35 3022218 50
ted with Zack strip ZB 8 and ZB 8/27, terminal strip marker KLM 2 and KLM,
width: 9.5 mm, color: gray (Assembly)
Insert strip, Sheet, white, Unlabeled, Can be labeled with: Office-Drucksys- ESL 62X46 0809502 5
teme, Plotter:Laser printer, Mounting type: Insert, Lettering field: 62 x 46
mm (Marking)
Labeling field, width: 48.8 mm (Marking) IB IL FIELD 8 2727515 10
Insert strip, Sheet, white, Unlabeled, Can be labeled with: Office-Drucksys- ESL 62X10 0809492 1
teme, Plotter:Laser printer, Mounting type: Insert, Lettering field: 62 x 10
mm (Marking)
Labeling field, width: 12.2 mm (Marking) IB IL FIELD 2 2727501 10
CD-ROM, with user documentation in PDF format, driver software and CD FL IL 24 BK 2832069 1
sample programs, IO configurator (Literature)
RJ45 connector, shielded, with bend protection sleeve, 2 pieces, gray for FL PLUG RJ45 GR/2 2744856 1
straight cables, for assembly on site. For connections that are not crossed,
it is recommended that you use the connector set with gray bend protection
sleeve. (Plug/Adapter)
RJ45 connector, shielded, with bend protection sleeve, 2 pieces, green for FL PLUG RJ45 GN/2 2744571 1
crossed cables, for assembly on site. For connections that are crossed, it
is recommended that the connector set with green bend protection sleeves
is used. (Plug/Adapter)
CAT5-SF/UTP cable (J-02YS(ST)C HP 2 x 2 x 24 AWG), heavy-duty instal- FL CAT5 HEAVY 2744814 1
lation cable, 2 x 2 x 0.22 mm, solid conductor, shielded, outer sheath: 7.8
mm diameter, inner sheath: 5.75 mm 0.15 mm diameter (Cable/conduc-
tor)
CAT5-SF/UTP cable (J-LI02YS(ST)C H 2 x 2 x 26 AWG), light-duty, flexi- FL CAT5 FLEX 2744830 1
ble installation cable 2 x 2 x 0.14 mm, stranded, shielded, outer sheath:
5.75 mm 0.15 mm diameter (Cable/conductor)
Crimping pliers, for assembling the RJ45 connectors FL PLUG RJ45..., for FL CRIMPTOOL 2744869 1
assembly on site (Tools)
End clamp, for assembly on NS 32 or NS 35/7.5 DIN rail (Assembly) E/UK 1201442 50
Connector set, for Inline bus coupler with I/Os mounted in rows (Plug/ IL BKDIO-PLSET 2878599 1
Adapter)
Documentation Type Order No. Pcs. / Pkt.
User manual, English, Automation terminals of the Inline product range IL SYS INST UM E - -
Application note, German/English, I/O modules at bus couplers AH IL BK IO LIST - -
Application note, English, Inline terminals for use in zone2 potentially ex- AH EN IL EX ZONE 2 - -
plosive areas
User manual, English, for drivers for G4-based controller boards, only IBS PC SC SWD UM E 2745172 1
available as a download.
User manual, English, for firmware messages of Generation 4 controller IBS SYS FW G4 UM E 2745185 1
boards, only available as a download.
User manual, English, for the Peripherals Communication Protocol (PCP), IBS SYS PCP G4 UM E 2745169 1
only available as a download.
7275_en_05 PHOENIX CONTACT 3
IL ETH BK DI8 DO4 2TX-PAC
3 Technical data
Dimensions (nominal sizes in mm)
119,8
71,5
Width 80 mm
Height 119.8 mm
Depth 71.5 mm
Note on dimensions Specfications with male connectors
General data
Color green
Weight 375 g (with male connectors)
Ambient temperature (operation) -25 C ... 55 C
Ambient temperature (storage/transport) -40 C ... 85 C
Permissible humidity (operation) 10 % ... 95 % (according to DIN EN 61131-2)
Permissible humidity (storage/transport) 10 % ... 95 % (according to DIN EN 61131-2)
Air pressure (operation) 70 kPa ... 106 kPa (up to 3000 m above sea level)
Air pressure (storage/transport) 70 kPa ... 106 kPa (up to 3000 m above sea level)
Degree of protection IP20
Protection class III, IEC 61140, EN 61140, VDE 0140-1
Connection data
Name Inline connectors
Connection method Spring-cage connection
Conductor cross section solid / stranded 0.08 mm ... 1.5 mm
Conductor cross section [AWG] 28 ... 16
Interface Inline local bus
Connection method Inline data jumper
Transmission speed 500 kBit/s, 2 MBit/s (Automatic detection, no combined system)
Interface Modbus/TCP(UDP)
Number 2
Connection method RJ45 female connector, auto negotiation
Transmission speed 10/100 MBit/s
Transmission physics Ethernet in RJ45 twisted pair
7275_en_05 PHOENIX CONTACT 4
IL ETH BK DI8 DO4 2TX-PAC
System limits of the bus coupler
Number of supported devices max. 63 (per station)
Number of local bus devices that can be connected max. 61 (On board I/Os are two devices)
Number of devices with parameter channel (PCP) max. 16
Support of branch termials with remote bus branch No
Observe the logic current consumption of each device when configuring an Inline station. It is specified in every terminal-specific data sheet.
The current consumption can differ depending on the individual terminal. The permissible number of devices that can be connected therefore
depends on the specific station structure.
Power supply for module electronics
Connection method Spring-cage connection
Name Bus coupler supply UBC; Communications power UL (7.5V) and the analog sup-
ply UANA (24 V) are generated from the bus coupler supply.
Supply voltage 24 V DC (via Inline connector)
Supply voltage range 19.2 V DC ... 30 V DC (including all tolerances, including ripple)
Supply current 70 mA
Current consumption max. 0.98 A (from UBK)
Power loss Typ. 3 W (Entire device)
Power consumption
NOTE: Electronics may be damaged when overloaded
Provide external fuses for the 24V areas UBK, UM, and US. The power supply unit must be able to supply four times the nominal current of the
external fuse, to ensure that it trips in the event of an error.
Main circuit supply UM 24 V DC
Supply voltage range UM 19.2 V DC ... 30 V DC (including all tolerances, including ripple)
Power supply at UM max. 8 A DC (Sum of UM + US; 4A, maximum, when used in potentially explosive
areas.)
Current consumption from UM max. 8 A DC
Segment supply voltage US 24 V DC
Supply voltage range US 19.2 V DC ... 30 V DC (including all tolerances, including ripple)
Power supply at US max. 8 A DC (Sum of UM + US; 4A, maximum, when used in potentially explosive
areas.)
Current consumption from US max. 8 A DC
Communications power UL 7.5 V DC 5%
Power supply at UL max. 0.8 A DC
I/O supply voltage UANA 24 V DC
Supply voltage range UANA 19.2 V DC ... 30 V DC (including all tolerances, including ripple)
Power supply at UANA max. 0.5 A DC
Digital inputs
Number of inputs 8
Connection method Inline connectors
Connection method 2, 3-wire
Description of the input EN 61131-2 type 1
Nominal input voltage 24 V DC
Nominal input current Typ. 3 mA
Current flow Limited to 3mA, maximum
Input voltage range "0" signal -30 V DC ... 5 V DC
Input voltage range "1" signal 15 V DC ... 30 V DC
7275_en_05 PHOENIX CONTACT 5
IL ETH BK DI8 DO4 2TX-PAC
Digital inputs
Delay at signal change from 0 to 1 1.2 ms
Delay at signal change from 1 to 0 1.2 ms
Permissible conductor length to the sensor 100 m
Protection against polarity reversal Suppressor diode
Digital outputs
Number of outputs 4
Connection method Inline connectors
Connection method 2, 3-wire
Nominal output voltage 24 V DC
Maximum output current per channel 500 mA
Maximum output current per device 2A
Nominal load, ohmic 12 W
Nominal load, inductive 12 VA (1.2 H; 48 )
Nominal load, lamp 12 W
Signal delay Typ. 1.2 ms
Maximum operating frequency with inductive nominal load 0.5 Hz (1.2 H; 48 )
Behavior at voltage switch-off The output follows the power supply without delay
Limitation of the voltage induced on circuit interruption Approx. -30 V
Output current when switched off max. 10 A (When not loaded, a voltage can be measured even at an output that
is not set.)
Behavior with overload Auto restart
Behavior with inductive overload Output can be destroyed
Reverse voltage resistance to short pulses Reverse voltage proof
Resistance to permanent reverse voltage max. 2 A
Overcurrent shut-down min. 0.7 A
Short-circuit and overload protection Free running circuit In output driver
Error messages to the higher level control or computer system
Short-circuit / overload of the digital outputs Yes
Sensor supply failure Yes
Failure of the actuator supply Yes
Mechanical tests
Vibration resistance in acc. with IEC 60068-2-6 5g
Shock test in acc. with IEC 60068-2-27 Operation: 25 g, 11 ms duration, semi-sinusoidal shock impulse
Conformance with EMC Directive 2004/108/EC
Noise immunity test in accordance with EN 61000-6-2
Electrostatic discharge (ESD) EN61000-4-2/IEC61000-4-2 Criterion B; 6 kV contact discharge, 8 kV air discharge
Electromagnetic fields EN61000-4-3/IEC61000-4-3 Criterion A; Field intensity: 10 V/m
Fast transients (burst) EN61000-4-4/IEC61000-4-4 Criterion A; all interfaces 1 kV
Criterion B; all interfaces 2 kV
Transient surge voltage (surge) EN61000-4-5/IEC61000-4-5 Criterion B; supply lines DC: 0.5 kV/0.5 kV (symmetrical/asymmetrical); fieldbus
cable shield 1 kV
Conducted interference EN61000-4-6/IEC61000-4-6 Criterion A; Test voltage 10 V
Noise emission test as per EN 61000-6-4
EN 55011 Class A
7275_en_05 PHOENIX CONTACT 6
IL ETH BK DI8 DO4 2TX-PAC
Approvals
For the latest approvals, please visit www.phoenixcontact.net/catalog.
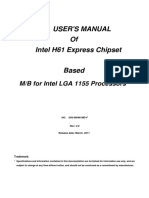
4 Basic circuit diagram
P IB Local bus
B
U L+
DO1...4 DI1...8
UANA
U L-
8 x DI C
7.5V 24V
4x
24V 24V US DO
UM
UBK US
A
UM
2 TX ETH
PWR
7275A016
Figure 1 Basic circuit diagram of the Ethernet bus coupler
Key:
P Microprocessor The gray areas in the basic circuit diagram represent the electrically
isolated areas:
IB Protocol chip A: Ethernet interface
B: Logic
Optocoupler C: I/O
Ethernet switch
PNP transistor
Transmitter with electrical isolation
7275_en_05 PHOENIX CONTACT 7
IL ETH BK DI8 DO4 2TX-PAC
5 Local diagnostic and status LED Color State Meaning
indicators NF Red Network failure
ON A network error occurred. The
I2 monitoring function detected an
PWR I2
error or the process data
watchdog was activated.
PWR
BF BO RY
DIA UL 5 6
PP
7 8 OFF No network error, normal state
US NF
UM CO PAC I2
X-
ETH
4 2T
I1
DO I1
DI8 1 7
H BK 0398 5
IL ET-No.: 2700 .xx 8
er /1 xx O1
Ord W: 00xx.xx. E 2 6
/F D
HW Addr.: ET
M
ET
AC R
HE
N PWR
BO
RY
PP 1
2
1
3
4
CO Red Configuration
UL
US
NF 3
4
I1
LNK1
BF ACT1 UM
CO
ON The active station configuration
DIA
ACT2
1 2 differs from the saved
LNK2
SE
T
3 4
RE
AC
T 1
configuration.
LN
K1 O1
X1 D E
LN
K2
AC
X2
T2
1 2 O1 OFF The active station configuration
3 4
matches the saved
configuration.
Figure 2 Indicators on the bus coupler
PWR: Supply
LED Color State Meaning UL Green ULogic
ETH/PWR: Ethernet ON 24 V bus coupler supply/internal
LNK Green Link port 1/2 communications power present
1/2 ON Connection via Ethernet to a
module via port 1/2 has been OFF 24 V bus coupler supply/internal
established. communications power not
present
OFF No connection established via
port 1/2 US Green USegment
ACT Yellow Port 1 activity ON 24 V segment circuit supply/
1/2 internal communications power
ON Sending or receiving Ethernet
present
telegrams at port 1/2
OFF 24 V segment circuit supply/
OFF Not sending or receiving
internal communications power
Ethernet telegrams at port 1/2
not present
BO Green Bootloader (Boot)
UM Green UMain
ON Boot loader active, firmware
ON 24 V main circuit supply/internal
started
communications power present
Flashing Waiting for BootP reply
OFF Firmware started successfully OFF 24 V I/O supply/internal
RY Green Ready communications power not
ON Connection to a process data present
client (Modbus/TCP (UDP) or
DDI) established
Flashing Firmware ready to operate
OFF Firmware not active
PP Yellow Plug and play
ON Plug and play mode active
OFF Plug and play mode not active
7275_en_05 PHOENIX CONTACT 8
IL ETH BK DI8 DO4 2TX-PAC
LED Color State Meaning 7 Connecting Ethernet, power
O1: Diagnostics of the Inline station/diagnostics and supply, actuators, and sensors
status of the outputs
D Green Diagnostics 7.1 Connecting Ethernet
ON Data transmission within the
station active R J 4 5 P in 1 T D +
Flashing Data transmission within the P in 2 T D -
station not active P in 3 R D +
E Red Error P in 4 re s .
ON Short circuit/overload at one of P in 5 re s .
the outputs P in 6 R D -
OFF No short circuit/overload of P in 7 re s .
outputs P in 8 re s .
1-4 Yellow O1...O4
Figure 4 Pin assignment of the 8-pos. RJ45
ON Output active
female connector
OFF Output not active
I1: Status of the inputs Connect Ethernet to the bus coupler via an 8-pos. RJ45
1-8 Yellow I1 ... I8 connector. For the pin assignment, please refer to the
ON Input active following table:
OFF Input not active Pin Assignment
1 TxD + (transmit data +)
6 Reset button 2 TxD - (transmit data -)
3 RxD + (receive data +)
The reset button is located on the front of the bus coupler. 4 Reserved
It has two functions: 5 Reserved
Restarting the bus coupler 6 RxD - (receive data -)
Restoring the default settings 7 Reserved
To restore the default settings (see page 12), hold down the 8 Reserved
reset button when applying the power supply.
Both Ethernet interfaces are provided with the
auto crossover function.
IL ETH BK DI8 DO4 2TX-PAC
Order-No.: 2703981
HW/FW: 00/100 PWR O1 I1 I2
MAC Addr.: xx.xx.xx.xx BO RY
UL PP
D E Shielding
ETHERNET
US NF 1 2 1 2 5 7
UM CO 3 4 3 4 6 8 The shielding ground of the connectable twisted
pair cables is electrically connected to the female
RESET RESET
connector. When connecting network segments,
avoid ground loops, potential transfers, and
LNK1 ACT1
voltage equalization currents via the braided
shield.
X1
LNK2 ACT2
X2
7275A006
Figure 3 Reset button
7275_en_05 PHOENIX CONTACT 9
IL ETH BK DI8 DO4 2TX-PAC
Terminal point assignment of the power connector
(1)
Observe bending radii
The housing dimensions specified under Terminal Assignment Terminal Assignment
Dimensions (nominal sizes in mm) on page 4 points points
refer to the bus coupler with Inline connectors 1.1 US 2.1 UM
without Ethernet connection. When installing the 1.2 UBK 2.2 UM
bus coupler in a control box observe the bending 1.3 GND UBK 2.3 GND UM, US
radii of the Ethernet cables and the connectors 1.4 Functional earth 2.4 Functional earth
used (e.g., FL CAT5 FLEX: 30 mm for permanent ground (FE) ground (FE)
installation and FL CAT5 HEAVY: 30 mm without
outer sheath and 45 mm with outer sheath; see NOTE: Malfunction
also
The module is designed exclusively for SELV
www.interbusclub.com/itc/eth/). If required, use
operation according to IEC 950/EN 60950/
angled RJ45 connectors to maintain these
VDE 0805.
bending radii.
For information on the power supplies, please
7.2 Connecting the supply, actuators, and sensors
refer to the IL SYS INST UM E user manual.
PWR O1 I1 I2 Terminal points 1.3 and 2.3 on the connector can
1.1
1.1 2.1
2.1 1.1
1.1 2.1
2.1 1.1
1.1 2.1
2.1 3.1
3.1 4.1
4.1
be jumpered if the same reference potential is to
1 1 1 1 1 1 1 1
be used for the communications power and the
1.2 2.2 1.2 2.2 1.2 2.2 3.2 4.2
1.2 2 2
2.2 1.2 2 2
2.2 1.2 2 2
2.2 3.2 2 2
4.2 segment voltage.
1.3 2.3 1.3 2.3 1.3 2.3 3.3 4.3
1.3 2.3 1.3 2.3 1.3 2.3 3.3 4.3
3 3 3 3 3 3 3 3
1.4 2.4 1.4 2.4 1.4 2.4 3.4 4.4
Terminal point assignment of the output connector (2)
1.4 4 4
2.4 1.4 4 4
2.4 1.4 4 4
2.4 3.4 4 4
4.4
Terminal Assignment Terminal Assignment
points points
1 2 3 4 7275B003
1.1 OUT1 2.1 OUT2
Figure 5 Terminal point assignment of the Inline 1.2 GND 2.2 GND
connectors
1.3 FE 2.3 FE
1.4 OUT3 2.4 OUT4
B
PWR DO4 DI4 DI4
1 2 3 4 Terminal point assignment of the input connector (3)
Terminal Assignment Terminal Assignment
IN6
+ points points
+24 V
US
- 1.1 IN1 2.1 IN2
1.2 UM 2.2 UM
+ +24 V
UBK- 1.3 GND 2.3 GND
1.4 IN3 2.4 IN4
IN8
Terminal point assignment of the input connector (4)
Terminal Assignment Terminal Assignment
points points
OUT3
OUT2
-
Ethernet 3.1 IN5 4.1 IN6
+
3.2 UM 4.2 UM
UM 7275B004
3.3 GND 4.3 GND
Figure 6 Connection example
3.4 IN7 4.4 IN8
B: Internal jumper
Connect the bus coupler according to Figure 6.
7275_en_05 PHOENIX CONTACT 10
IL ETH BK DI8 DO4 2TX-PAC
8 Notes on using the terminal in potentially explosive areas
Installation in zone 2
WARNING: Explosion hazard 1. Observe the specified conditions for use in potentially
explosive areas.
Before startup, ensure that the following points
and instructions have been observed. 2. When installing the terminal, use an appropriate and
approved housing with a minimum protection of IP54.
Approval according to EC directive 94/9 Please observe the EN 60079-14 requirements, e.g., a
II 3G Ex nA IIC T4 X steel housing with a wall thickness of 3 mm.
3. In potentially explosive areas, only snap the Inline
Installation notes terminal onto the rail and connect the cables when the
power is switched off.
1. This Inline terminal can be installed in zone 2.
4. In zone 2, only connect devices to the supply and signal
2. The Inline terminal must only be installed, operated,
circuits that are suitable for operation in potentially
and maintained by qualified personnel.
explosive areas of zone 2 and the conditions at the
3. Please follow the installation instructions given in the installation location.
IL SYS INST UM E user manual and the package slip.
4. When installing and operating the device, the Restrictions/limit values
applicable safety directives (including national safety
1. Only Inline terminals that are approved for use in
directives), accident prevention regulations, as well as
potentially explosive areas may be snapped next
general technical regulations, must be observed.
to this Inline terminal. Before using an Inline terminal
5. Please refer to the corresponding documentation (user in a zone 2 potentially explosive area, first check that
manual, data sheet, package slip) and the certificates the terminal has been approved for installation in this
(EC type examination and other approvals, if area. For a list of terminals that are approved for the
applicable) for safety-related data. potentially explosive areas of zone 2, please refer to the
6. It is not permitted to access the circuits inside the Inline AH EN IL EX ZONE 2 application note.
terminal. Do not repair the Inline terminal by yourself but 2. Please make sure that the maximum permissible
replace it with a terminal of the same type. Repairs may current of 4 A flowing through potential jumpers UM
only be carried out by the manufacturer. and US (total current) is not exceeded when using the
7. IP20 (EN 60529) protection of the device is provided for Inline terminals in potentially explosive areas.
a clean and dry environment. 3. The supply of UM and US at the bus coupler must not
8. Do not subject the Inline terminal to mechanical strain exceed 4 A.
and/or thermal loads, which exceed the limits specified 4. Also ensure that the maximum permissible current
in the product documentation. flowing through potential jumper UL is not exceeded.
9. The Inline terminal has not been designed for use in
potentially dust-explosive atmospheres.
7275_en_05 PHOENIX CONTACT 11
IL ETH BK DI8 DO4 2TX-PAC
9 Startup 9.3 Sending BootP requests
9.1 Delivery state/default settings Initial startup:
By default upon delivery, the following functions and During initial startup, the bus coupler transmits BootP
features are available: requests without interruption until it receives a valid IP
address. The requests are transmitted at varying intervals
IP Configuration (2 s, 4 s, 8 s, 2 s, 4 s, etc.) so that the network is not loaded
IP Address: 0.0.0.0 unnecessarily.
Subnet Mask: 0.0.0.0 If valid IP parameters are received, they are saved as
Default Gateway: 0.0.0.0 configuration data by the bus coupler.
BootP Requests: Enable
Further startups:
Software Update
Software Update on Next Disable If the bus coupler already has valid configuration data and
Reboot: BootP is not disabled, it only transmits three more BootP
requests on a restart. If it receives a BootP reply, the new
TFTP-Server IP Address: 0.0.0.0
parameters are saved. If the bus coupler does not receive a
Downloadable File Name: c2703981.fw reply, it starts with the previous configuration. If BootP is
System Identification disabled and a valid configuration is available, the bus
Name of Device: IL ETH BK DI8 DO4 coupler starts immediately.
2TX-PAC
For the definition of the IP address via BootP, you
Description: Ethernet bus terminal
can use any BootP server available.
Physical Location: Unknown
Contact: Unknown To check whether BootP is disabled, refer to the
Process Data Monitoring "IP Configuration" menu in WBM, see page 14.
Process Data Watchdog 500 ms
Timeout:
Fault Response Mode: Reset Fault Mode
(Default)
Plug and play mode Enable
Expert mode Disable
By default upon delivery, the bus coupler has no
valid IP parameters.
9.2 Starting the firmware
The firmware is started once you have supplied the bus
coupler with power. The following LED sequence is shown:
Display Meaning
BO flashing Boot loader is started
BootP requests are being sent
BO ON Extracting firmware
BO OFF Starting the firmware
RY flashing Firmware ready to operate
7275_en_05 PHOENIX CONTACT 12
IL ETH BK DI8 DO4 2TX-PAC
10 Web-based management (WBM) 10.2 Structure of the web pages
The web pages for the Ethernet bus coupler are divided into
The bus coupler has a web server, which generates the
two sections. The left-hand side has the selection menu with
required pages for web-based management and,
the relevant submenus. The right-hand side displays the
depending on the requirements of the user, sends them to
information related to the menu item. Static and dynamic
the "Factory Manager" or a standard web browser. Web-
information about the bus coupler can be found in the
based management can be used to access static
following menus.
information (e.g., technical data, MAC address) or dynamic
information (e.g., IP address, status information) or to
< ip - a d d r e s s >
change the configuration (password-protected).
in d e x .h tm
10.1 Calling web-based management G e n e ra l
In s tr u c io n s
The IL ETH BK DI8 DO4 2TX-PAC web server can be In fo r m a tio n -
addressed using the IP address if configured g e n in s t.h tm
D e v ic e
correspondingly. The bus coupler homepage is accessed In fo r m a tio n
by entering the URL "http://ip address". G e n e ra l -
d e v in fo .h tm
Example: http://172.16.113.38 T e c h n ic a l D a ta -
te c h d a ta .h tm
H a r d w a r e In s ta lla tio n -
If you cannot access the WBM pages, check the h w in s ta l.h tm
connection settings in your browser and L o c a l D ia g n o s tic s -
lo c d ia g .h tm
deactivate the proxy, if set. D e v ic e
C o n fig u r a tio n
IP C o n fig u r a tio n -
ip c o n fig .h tm
ip c o n in f.h tm
S y s te m Id e n tific a tio n -
s y s c o n f.h tm
s y s in fo .h tm
S o ftw a re U p d a te -
s w u p d a te .h tm
s w u p in fo .h tm
ftp in fo .h tm
C h a n g e P a s s w o rd -
p a s s w o rd .h tm
p a s s in fo .h tm
In lin e
S ta tio n
S e r v ic e s -
s e r v ic e s .h tm
s v p p in fo .h tm
s v p fin fo .h tm
P r o c e s s D a ta M o n ito r in g -
p d m o n it.h tm
p d m o n in f.h tm
p d n fin fo .h tm
R e m o te D ia g n o s tic s -
Figure 7 WBM homepage r e m d ia g .h tm
B u s C o n fig u r a tio n -
b u s c o n f.h tm
P C P C o n fig u r a tio n -
p c p c o n f.h tm
p c p in fo .h tm
Figure 8 Structure of the web pages
7275_en_05 PHOENIX CONTACT 13
IL ETH BK DI8 DO4 2TX-PAC
10.3 "IP Configuration" menu 10.5 Firmware update via WBM and TFTP
Figure 9 illustrates the set IP parameters and addressing The following steps must be carried out when executing a
mechanism. To change the IP parameters via WBM, "BootP firmware update using WBM:
Requests" must be set to "Disable" or BootP requests to the In WBM, click on "Device Configuration" and then
bus coupler must not be answered (no BootP server can be "Software Update". Enter the IP address of the TFTP
active in the network). server in the "TFTP Server IP Address" field. Then enter
the file name of the firmware and the path name, if
necessary, in the "Downloadable File Name" field. In
the "Software Update on Next Reboot" field, click
"Enable".
Enter your password. To wait until later to apply the
update with a restart, click "Apply". To start the update
immediately, click "Apply and Reboot".
Check the execution of the update by checking the
firmware version under "Device Information/General".
In the event of an error during the download, a restart
repeats the download. To abort the update, set
"Disable" in the "Software Update on Next Reboot"
field.
Figure 9 "IP Configuration" menu
10.4 Password protection
All status changes to the bus coupler require the entry of a
password. The password can be changed at any time. Your
unique password must be between four and twelve
characters long (note that the password is case-sensitive).
By default upon delivery, the password is "private".
If you forget the password, the only way to access
the bus coupler again is to reset the entire
configuration using the reset button.
Figure 10 "Software Update" menu
7275_en_05 PHOENIX CONTACT 14
IL ETH BK DI8 DO4 2TX-PAC
NAME
If BootP is set to "Enable" and a reply with values Contains the user-specific station name. The station name
for "TFTP Server IP Address" and "Downloadable can be modified via WBM.
File Name" is received on a restart, these values
overwrite the entries made in WBM. After restart IP_ADDRESS
the values accepted are displayed in WBM. Contains the IP address of the station.
MODULE_NUMBER
Contains the number of connected Inline terminals,
In the event of an error during Flash programming including local I/Os. In the event of a bus error, the number
(e.g., voltage interrupt), the bus coupler can only of the last known operable configuration is indicated.
be restarted by repeating the update. The bus
coupler starts the update automatically after a DIAGNOSTIC_STATUS_REGISTER
restart. Access to WBM is no longer possible.
Contains the INTERBUS status, represented by all bits of
the diagnostic status register. A detailed description can be
found in the diagnostic parameter register. Whenever an
10.6 Process data access via XML
error bit is set, the diagnostic parameter register is rewritten.
The integrated web server of the IL ETH BK DI8 DO4 2TX-
PAC offers the option of accessing the process data of the IL_BUS
connected Inline terminals via a web page in XML format. Frame for the connected Inline terminals.
You can access the web pages via a standard web browser.
For calling the XML pages with the process data enter the IL_MODULE
address in the following format in the address line of the
Frame for the data of an individual Inline terminal. The
browser:
terminals are numbered consecutively from one to a
http:// <IP address>/procdata.xml maximum of 63.
10.7 XML file structure MODULE_TYPE
The XML file contains different data areas: Contains the terminal type. Possible types are DI, DO, DIO,
AI, AO, AIO, and PCP.
IL_STATION
Frame for the entire XML file. The mandatory elements of PD_CHANNELS
this frame are IL_BUS_TERMINAL and IL_BUS. Number of process data channels in an Inline terminal. For
digital terminals the number of channels is equal to the
IL_BUS_TERMINAL number of supported bits. For other terminals, the number of
This data area contains information on the entire Inline process data words is indicated. Example: An IB IL AO 2
station (bus coupler and all connected terminals). This data has two process data channels and an IB IL 24 DO 8 has
area includes: TERMINAL_TYPE, the module name NAME, eight bits and eight process data channels.
the IP address IP_ADDRESS, the number of connected
terminals MODULE_NUMBER, the local bus diagnostic PD_WORDS
status register DIAGNOSTIC_STATUS_REGISTER, and Number of process data words in an Inline terminal. Please
the local bus diagnostic parameter register note that analog terminals always have the same number of
DIAGNOSTIC_PARAMETER_REGISTER. output and input words. An IB IL AO 2 therefore also has
two input channels and an IB IL AI 2 also has two output
TERMINAL_TYPE channels.
This area contains the designation of the bus coupler, which
is always IL ETH BK DI8 DO4. PD_IN
This area is used by all terminals that occupy input data. The
number of process data words depends on the terminal
type.
7275_en_05 PHOENIX CONTACT 15
IL ETH BK DI8 DO4 2TX-PAC
Examples: PD_OUT
a) Inline terminal with two active inputs This area is used by all terminals with output data. The use
<IL_MODULE number="1"> of bits is identical with that in "PD_IN".
<MODULE_TYPE>DI</MODULE_TYPE> In the event of an error in the Inline station, this is indicated
<PD_CHANNELS>2</PD_CHANNELS> in the diagnostic registers. The D LED flashes on the bus
<PD_WORDS>1</PD_WORDS> coupler. The process data is invalid because only internal
<PD_IN word="1">3</PD_IN> values are indicated, not the values on the local bus.
</IL_MODULE> In order to make sure that only valid data is displayed, the
b) Inline terminal with two digital inputs and only the second diagnostic register must also always be requested. The
input is active. same is true in the event of a faulty configuration. In this
<IL_MODULE number="3"> case, the local bus does not run and only internal values can
<MODULE_TYPE>DI</MODULE_TYPE> be read in the XML file.
<PD_CHANNELS>2</PD_CHANNELS> In the event of a peripheral fault, all data is valid, except for
<PD_WORDS>1</PD_WORDS> the data of the faulty terminal.
<PD_IN word="1">2</PD_IN>
</IL_MODULE>
c) Inline terminal with 16 digital inputs and the 13th and the
14th inputs are active.
<IL_MODULE number="7">
<MODULE_TYPE>DI</MODULE_TYPE>
<PD_CHANNELS>16</PD_CHANNELS>
<PD_WORDS>1</PD_WORDS>
<PD_IN word="1">12288</PD_IN>
</IL_MODULE>
The input word returns the value 12288 (212 + 213).
d) Inline terminal with two analog inputs, only the first
channel being active (14970).
<IL_MODULE number="10">
<MODULE_TYPE>AI</MODULE_TYPE>
<PD_CHANNELS>2</PD_CHANNELS>
<PD_WORDS>2</PD_WORDS>
<PD_IN word="1">14970</PD_IN>
<PD_IN word="2">8</PD_IN>
<PD_OUT word="1">0</PD_OUT>
<PD_OUT word="2">0</PD_OUT>
</IL_MODULE>
7275_en_05 PHOENIX CONTACT 16
IL ETH BK DI8 DO4 2TX-PAC
Figure 11 Screen for XML data
7275_en_05 PHOENIX CONTACT 17
IL ETH BK DI8 DO4 2TX-PAC
11 Startup behavior of the bus coupler 11.2 Expert mode
The startup behavior of the bus coupler is specified via two Expert mode inactive
system parameters, plug and play mode (Var ID 2240hex)
If expert mode is deactivated (default upon delivery), the
and expert mode (Var ID 2275hex). By default upon delivery,
bus coupler runs as described in 11.1.
plug and play mode is activated and expert mode is
deactivated. Expert mode active
11.1 Plug and play mode If expert mode is active, the bus is not started automatically.
The user must set the station to the "RUN" state using the
Please note that the following description is valid appropriate firmware commands such as
when expert mode is deactivated. CREATE_CONFIGURATION, 0710hex and
START_DATA_TRANSFER, 0701hex. The PP and CO
Plug and play mode active LEDs are not used.
The IL ETH BK DI8 DO4 2TX-PAC supports plug and play
mode (P&P). This mode enables Inline terminals connected
in the field to be started up using the bus coupler without a
higher-level computer. The P&P mode status (active or
inactive) is stored retentively on the bus coupler. The
current mode is displayed via the PP LED. In P&P mode, the
connected Inline terminals are detected and their function
checked. If this physical configuration is ready to operate, it
is started, however writing outputs is not enabled.
To enable writing outputs, P&P mode must be deactivated.
The deactivation of P&P mode is also the signal to save the
active configuration as the reference configuration.
Plug and play mode inactive
When P&P mode is deactivated, the reference configuration
is compared to the physical configuration. If they are the
same, the bus coupler is set to the "RUN" state.
If the reference configuration and the physical configuration
differ, the CO LED lights up and process data exchange is
not possible for safety reasons.
In order to operate the bus despite this, you have the
following two options:
1. Restore the original configuration so that the reference
configuration and the physical configuration are the
same again
2. Activate P&P mode and restart the bus coupler so that
the active physical configuration is accepted as the
reference configuration
7275_en_05 PHOENIX CONTACT 18
IL ETH BK DI8 DO4 2TX-PAC
11.3 Possible combinations of modes
P&P mode Expert Description/effect Diagram
mode
Inactive Inactive Normal case - the station sets valid configurations to the "RUN" state. Figure 12 on
Process data exchange is possible. page 19
Active Inactive The connected configuration is stored as the reference configuration and the Figure 13 on
station is set to the "RUN" state. Process data cannot be written. page 19
Any Active The bus is not started automatically, instead it waits for firmware commands
from the user.
11.4 Startup diagrams for the bus coupler
P o w e r u p P o w e r u p
L o a d a n d a c tiv a te R e a d in
s a v e d c o n fig u r a tio n c o n n e c te d c o n fig u r a tio n
C o n fig u r a tio n = C a n c o n fig u r a tio n b e
r e fe r e n c e c o n fig u r a tio n ? N o
N o o p e ra te d ?
Y e s
Y e s
S e P t o s w t a e tr i o U n p t o
S e P t o s w t a e tr i o U n p t o "R U N " s ta te
"R U N " s ta te
S to p
S to p S ta tio n in
S ta tio n in P P L E D = O N
P P L E D = O F F "R U N " s ta te
"R U N " s ta te C O L E D = O N
C O L E D = O N D L E D = fla s h in g
D L E D = fla s h in g P P L E D = O N
P P L E D = O F F E rro r c a u s e
E rro r c a u s e in C O L E D = O F F
C O L E D = O F F in lo c a l b u s
lo c a l b u s D L E D = O N
D L E D = O N d ia g n o s tic r e g is te r s
d ia g n o s tic r e g is te r s
o r in W B M
7 2 7 5 A 0 1 1
7 2 7 5 A 0 1 0
Figure 12 "Standard" mode/ Figure 13 P&P mode active and
P&P and expert mode inactive expert mode inactive
When expert mode is deactivated, the bus
coupler must be restarted for the change to take
effect.
7275_en_05 PHOENIX CONTACT 19
IL ETH BK DI8 DO4 2TX-PAC
11.5 Changing and starting a configuration in P&P 12 Monitoring functions
mode
Monitoring functions with different features are available for
Ensure that plug and play mode is activated and monitoring Ethernet communication.
expert mode is deactivated. Process data watchdog (process data monitoring)
The following steps must be carried out when changing an Connection monitoring for Modbus (see Modbus
existing configuration: connection timeout on page 29) and DTI
Switch off the supply voltage. The monitoring functions differ according to the features/
functions that need to be monitored. Depending on the
Change the configuration.
application requirements, the appropriate monitoring
Switch on the supply voltage. function can be activated. By default upon delivery, the
A configuration is started as shown in the flowchart (see process data watchdog is activated.
Figure 12 and Figure 13). During startup, please observe
the following: Monitoring Monitoring
Once the bus coupler has been switched on, the mechanism ... the ... the ... the ...
previously found configuration is read and started, as client indivi- Ethernet process
long as no errors are present. applica- dual connec- data ex-
All connected Inline devices are integrated in the active tion chan- tion change
configuration if the "DIAG" LEDs are continuously lit on nels
all terminals. Process data X X X
To prevent the accidental use of the wrong watchdog
configuration, process data can only be accessed when (process data
P&P mode has been deactivated. monitoring)
Connection X X X
monitoring
When P&P mode is active, access to process for Modbus and
data is rejected with the error message 00A9hex DTI
(ERR_PLUG_PLAY). The outputs of the entire
Inline station are reset in P&P mode. In the event of an error the system responds with a fault
P&P mode is activated either using WBM, the response. The user determines the required fault response
Modbus command register or the "Set_Value" mode.
command via Ethernet. Once P&P mode has
12.1 Setting the required fault response mode
been switched off, the bus is only started if the
existing configuration and the reference The required fault response mode can be set via web-based
configuration are the same. management, by writing to Modbus register 2002 or using
the "Set_Value" service for variable 2277hex. The following
fault response modes are available:
Fault Value Function
response
mode
Standard 0 All outputs are set to "0".
fault mode
Reset fault 1 The digital outputs are set to "0".
mode The analog outputs are set to the
(default) default value for the terminal.
Hold last 2 All outputs keep their last value.
state mode
7275_en_05 PHOENIX CONTACT 20
IL ETH BK DI8 DO4 2TX-PAC
12.2 Process data watchdog/process data NET FAIL
monitoring
If there is no triggering during the timeout period, an error
By default upon delivery, the process data occurred. Two responses follow:
watchdog is activated with a 500 ms timeout. The selected fault response mode is executed.
The NetFail signal is set (the NetFail LED is red).
The reason for setting the NetFail signal is listed in the
reason code.
For safety reasons, the user cannot stop the watchdog once
it has been activated. If the user terminates the controlling
application, there is no watchdog triggering; when the
timeout period elapses, the NetFail signal is set and the
selected fault response mode is executed. After the
watchdog has performed its task, the outputs are only
enabled again after acknowledgment.
When the error is acknowledged, the watchdog is
restarted. This means that it must be triggered
during the timeout period, otherwise an error is
detected again.
Configuration of the process data watchdog
Timeout periods can only be changed if the
watchdog is in the "INIT" state. The "INIT" state is
Figure 14 Process data monitoring configuration in WBM
present:
Process data watchdog function After power-up, as long as process data
exchange has not taken place
A process data watchdog is integrated into the
When a timeout has occurred and fault response
IL ETH BK DI8 DO4 2TX-PACbus coupler to avoid
has been activated, and NetFail has not yet been
uncontrolled setting/resetting of the I/O station outputs in the
acknowledged.
event of an error.
If station outputs are set, the controlling process must be The process data watchdog timeout period can be
able to access the station. In the event of an error, e.g., configured from 200 ms to 65000 ms. Timeout periods can
network line interrupted or function error in the controlling be set via web-based management, by writing to Modbus
process, the bus terminal can respond appropriately via the register 2000 or using the "Set_Value" service for variable
process data watchdog. By default upon delivery, the 2233hex.
watchdog is activated with a 500 ms timeout. The first write
process activates the process data watchdog. The next
write process is expected during the timeout period (default:
500 ms). During error-free operation, the write process is
performed during the timeout period and the watchdog is
restarted (triggered).
Reading calls do not trigger the process data
watchdog.
7275_en_05 PHOENIX CONTACT 21
IL ETH BK DI8 DO4 2TX-PAC
Deactivating the process data watchdog Possible reasons:
The process data watchdog can only be deactivated if it is in DDI_NF_TASK_CREAT_ERR 0001hex
the "INIT" state. For deactivation, the timeout value is set to /* Error when starting a task */
"zero".
DDI_NF_LISTENER_ERR 0002hex
/* Listener task error */
P o w e r u p
DDI_NF_RECEIVER_ERR 0003hex
/* Receiver task error */
"IN IT " s ta te
DDI_NF_ACCEPT_ERR 0004hex
W r ite _ O K / /* Accept function error */
C le a r N e tF a il
DDI_NF_ECHO_SERVER_ERR 0005hex
/* Echo server task error */
W a tc h d o g DDI_NF_HOST_CONTROLLER_ERR 0006hex
T im e o u t > 0 ? /* Host controller task error */
N o
DDI_NF_DTI_TIMEOUT 0007hex
/* DTI timeout occurred */
Y e s DDI_NF_HOST_TIMEOUT 0008hex
/* Host timeout occurred */
DDI_NF_USER_TEST 0009hex
A C T IV E : /* NetFail set by user */
W r ite _ O K DDI_NF_CONN_ABORT 000Ahex
Y e s
/* Connection aborted */
N o DDI_NF_INIT_ERR 000Bhex
W a tc h d o g tim e o u t e la p s e s
S e t N e t F a il /* Initialization error */
F a u lt r e s p o n s e
6 1 5 6 0 0 2 9
DDI_NF_DTI_WATCHDOG 000Chex
/* Process data watchdog triggered */
DDI_NF_MBUS_TIMEOUT 000Dhex
Figure 15 Status diagram of the process data watchdog /* Modbus timeout occurred */
Fault response acknowledgment
The NetFail signal can be acknowledged via web-based
management via Modbus, by writing command 0002hex to
command register 2006 or using the
"ETH_ClrNetFailStatus" function.
Reasons for fault response
The reasons for a fault response and a set NetFail signal
can be accessed via web-based management, Modbus
register 2004 or the "ETH_GetNetFailStatus" service.
7275_en_05 PHOENIX CONTACT 22
IL ETH BK DI8 DO4 2TX-PAC
13 Modbus protocol
The bus coupler supports a Modbus/TCP server and a
Modbus/UDP server with the following features:
13.1 Modbus connections
The bus coupler supports up to eight Modbus/TCP
connections simultaneously.
The connection can access different addresses
simultaneously (static or dynamic tables). If a connection
over SDDI is used and simultaneously a connection to the
static table is opened, the SDDI connection is aborted with
the xxxx00AAhex error code. Only after a bus coupler reset
can the SDDI connection be reestablished. Simultaneous
connections over SDDI and Modbus dynamic tables are not
write-protected. Writing to static and dynamic tables is
protected with semaphores.
Since eight connections are supported, a connection can
quickly be restored. This means that the client can
successfully restore an interrupted Modbus connection.
The UDP server is wireless.
13.2 Modbus interface
The Modbus interface according to standard port 502
supports Modbus communication via the bus coupler.
13.3 Modbus conformance classes
The bus coupler supports Modbus conformance class 0.
13.4 Modbus function codes
The following function codes are supported:
Code no. Function code
fc3 Read multiple registers
fc4 Read input registers
fc6 Write single register
fc16 Write multiple registers
fc23 Read/write registers
7275_en_05 PHOENIX CONTACT 23
IL ETH BK DI8 DO4 2TX-PAC
13.5 Modbus tables
Special registers
Modbus register table Access Function
(16-bit word)
1280 Read/write Modbus connection monitoring timeout
2000 Read/write Process data watchdog timeout
2002 Read/write Fault response mode
2004 Read/write NetFail reason
2006 Read/write Command register
PCP
Modbus register table Access Function
(16-bit word)
6020 - 6173 Read/write See Modbus PCP registers on page 30
Diagnostics
Modbus register table Access Function
(16-bit word)
7996 Read only Status register
7997 Read only Local bus diagnostic status register
7998 Read only Local bus diagnostic parameter register 1
7999 Read only Local bus diagnostic parameter register 2
Process data (dynamic table)
Modbus register table Access Function
(16-bit word)
8000 Read only Local digital inputs
8001 - (8000+x) Read only Bus inputs (x words)
(8001+x) Read/write Local digital outputs
(8002+x) - (8001+x+y) Read/write Bus outputs (y words)
Process data (static table)
Modbus register table Internal Access Function
(16-bit word) IL ETH BK DI8 DO4 2
TX-PAC tables (16-bit
word)
0-191 %I1-192 Read only Digital inputs
192-383 %AI1-192 Read only Analog inputs
384-575 %Q1-192 Read/write Digital outputs
576-767 %AQ1-192 Read/write Analog outputs
7275_en_05 PHOENIX CONTACT 24
IL ETH BK DI8 DO4 2TX-PAC
13.6 Assignment of process data
DO4 ETH BK
DI8 ETH BK
ETH BK
DO8
DO2
AO1
AO2
DI8
DI2
AI2
AI2
ETHERNET
RESET
LNK1 ACT1
X1
LNK2 ACT2
X2
Modbus register/location of process data
Address 8000 xxxxxxxx
Address 8001 xxxxxxxx
Address 8002 xx
Address 8003 Channel 1 value
DATA IN Address 8004 Channel 2 value
Address 8005 Channel 1 value
Address 8006 Channel 2 value
Address 8007 Channel 1 status
Address 8008 Channel 2 status
Address 8009 xxxx
Address 8010 xxxxxxxx
Address 8011 xx
Address 8012 Channel 1 parameter
DATA OUT Address 8013 Channel 2 parameter
Address 8014 Channel 1 parameter
Address 8015 Channel 2 parameter
Address 8016 Channel 1 value
Address 8017 Channel 1 value
Address 8018 Channel 2 value
7275A014
Figure 16 Example for the location of process data in dynamic tables
7275_en_05 PHOENIX CONTACT 25
IL ETH BK DI8 DO4 2TX-PAC
DO4 ETH BK
DI8 ETH BK
ETH BK
DO8
DO2
AO1
AO2
DI8
DI2
AI2
AI2
ETHERNET
RESET
LNK1 ACT1
X1
LNK2 ACT2
X2
Digital IN Address 0000 xxxxxxxx
Address 0001 xxxxxxxx
Address 0002 xx
Address 0191
Analog IN Address 0192 Channel 1 value
Address 0193 Channel 2 value
Address 0194 Channel 1 value
Address 0195 Channel 2 value
Address 0196 Channel 1 status
Address 0197 Channel 2 status
Address 0383
Digital OUT Address 0384 x xxx
Address 0385 xxxxxxxx
Address 0386 xx
Address 0575
Analog OUT Address 0576 Channel 1 parameter
Address 0577 Channel 2 parameter
Address 0578 Channel 1 parameter
Address 0579 Channel 2 parameter
Address 0580 Channel 1 value
Channel 1 value
Address 0581
Channel 2 value
Address 0582
7275A015
Address 0767
Figure 17 Example for the location of process data in static tables
7275_en_05 PHOENIX CONTACT 26
IL ETH BK DI8 DO4 2TX-PAC
13.7 Diagnostic registers Bit Constant Meaning
5 RUN_BIT Exchanging data cycles
Status register
6 ACTIVE_BIT Local bus master ACTIVE
Address:
7 READY_BIT Local bus master READY, selftest
Modbus: Register 7996 completed
Using the Ethernet host controller, e.g., PLC, the user can
read current diagnostic information from the network Operating indicators: READY, ACTIVE, RUN
interface status word without the need for configuration The READY, ACTIVE, and RUN operating indicators show
software. the current state of the local bus system. The diagnostic
Only the two least significant bits (bit 0 and bit 1) have a parameter register is not used.
function. The bits of bit 2 to bit 15 are reserved. After the selftest, the local bus master is ready for operation.
Bit 0 = 0: An error occurred The READY indicator bit is set (READY = 1).
(e.g., a bit in the diagnostic register is set). If the local bus master has been configured and the
Bit 0 = 1: No error configuration frame activated without errors, the system
Bit 1 = 0: No NetFail indicates it is active. The READY and ACTIVE indicator bits
Bit 1 = 1: NetFail present are set (READY = 1, ACTIVE = 1).
This results in the following values for the status word: In addition, the RUN indicator bit is set when data exchange
is started
Register State (READY = 1, ACTIVE = 1 and RUN = 1).
contents
Errors are indicated until they are acknowledged.
0000hex An error occurred (e.g., a bit in the
diagnostic register is set).
0001hex No errors have occurred.
0002hex A NetFail occurred.
Local bus diagnostic status register
Address:
Modbus: Register 7997
Each bit in the local bus diagnostic status register is
assigned a state of the local bus master on the bus coupler.
The states in the error bits (USER, PF, BUS, CTRL) are
described in greater detail using the diagnostic parameter
register. Whenever one of the error bits described above is
set, the diagnostic parameter register is rewritten.
Otherwise, the diagnostic parameter register has the value
0000hex.
Bit Constant Meaning
0 USER_BIT Application program error
1 PF_BIT Local bus device detected a
peripheral fault
2 BUS_BIT Error on local bus
3 CTRL_BIT Local bus master has an internal
error
4 DETECT_BIT Error localization
("LOOK FOR FAIL")
7275_en_05 PHOENIX CONTACT 27
IL ETH BK DI8 DO4 2TX-PAC
Error indicators: DETECT, CTRL, BUS, PF, USER Local bus diagnostic parameter register 1
The DETECT error bit shows that an error is preventing Address:
further operation of the local bus (DETECT = 1). The Modbus: Register 7998
outputs return to the set state, see page 20. The diagnostic
For detected local bus errors, the local bus diagnostic
routine searches for the error cause.
parameter register contains the error location:
Once the error cause has been detected, the DETECT error
Device number of a device,
bit will be reset (DETECT = 0) and the error indicated in the
e.g., "0.3" for bus segment 0; device 3
USER, PF, BUS and CTRL bits. The diagnostic parameter
register and the extended diagnostic parameter register Error location, e.g., device number 0.3
provide a detailed description of the error cause.
Error with local bus shutdown S e g m e n t n u m b e r P o s itio n in th e s e g m e n t
Error bit/location Contents of the
diagnostic
0 0 0 3
parameter register n n + 1
7 0 7 0
CTRL = 1 Error code 7 2 7 5 a 0 0 7
Probably local bus master/ Figure 18 Contents of the local bus diagnostic parameter
hardware error. register (example)
BUS = 1 Error location
Error on a local bus segment. Local bus diagnostic parameter register 2
Error without local bus shutdown Address:
Error bit/location Contents of the Modbus: Register 7999
diagnostic Local bus diagnostic parameter register 2 contains
parameter register additional information about the error codes.
PF = 1 Error location
Fault on the peripheral side of a
local bus device:
Short circuit at the output
Sensor/actuator supply not
present
USER = 1 Error code
User error, e.g., due to incorrect
parameters
7275_en_05 PHOENIX CONTACT 28
IL ETH BK DI8 DO4 2TX-PAC
13.8 Special registers NetFail reason
Address:
Modbus connection timeout
Modbus: Register 2004
Modbus: Register 1280 This register can be used to read the reason after setting the
A monitoring mechanism can be activated for every NetFail signal. If there is no NetFail signal, the register is 0.
Modbus/TCP connection in order for the bus coupler to
Command register
detect an error on the network (e.g., faulty cable) or in the
client (operating system crash or error in the TCP/IP Modbus: Register 2006
protocol stack) and respond accordingly. The monitoring The network interface command register can be used to
mechanism is activated via the relevant TCP connection transmit commands with basic functions to the bus coupler
upon the first read or write procedure. using the Ethernet host controller, e.g., PLC.
To change the timeout value for the relevant TCP
connection, write the new timeout value to the timeout table
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
to the special address 1280 using functions "fc6" or "fc16".
The value of this entry is the value of the timeout table. The Reserved bits X X X
time is specified in milliseconds in the range from 200 ms to
65000 ms. Clear peripheral fault
Clear NetFail
A timeout value of "0" deactivates the monitoring function.
Values between 1 ms and 199 ms, and values greater than Plug and play 61560030
65000 ms generate exception response 3
Figure 19 Command word
(ILLEGAL DATA VALUE).
Connection monitoring with the new timeout
values is only activated after a Modbus/TCP
function has been executed on the relevant TCP
connection.
After the first access by a Modbus/TCP function, all other
access must be carried out using the entered timeout value.
Otherwise, fault response mode is activated and the
Modbus/TCP connection is disabled.
Process data watchdog timeout
Modbus: Register 2000
Setting or reading the timeout value for the process data
watchdog. The time is specified in milliseconds in the range
from 200 ms to 65000 ms. A timeout value of "0" deactivates
the watchdog.
Fault response mode
Modbus: Register 2002
Setting or reading the fault response mode. For information
on fault response mode settings, please refer to Section
Setting the required fault response mode on page 20.
7275_en_05 PHOENIX CONTACT 29
IL ETH BK DI8 DO4 2TX-PAC
14 Modbus/TCP PCP registers
Communication Configuration Note
14.1 Modbus/TCP PCP registers reference register register
The PCP registers are divided into two classes: CR 2 6020
Communication registers for exchanging data with the 6021 Index
desired PCP device 6022 Subindex
Configuration registers for selecting the invoke ID, 6023 Invoke ID
index, and subindex of the PCP device 6024 - 6029 Reserved
The IL ETH BK DI8 DO4 2TX-PAC supports 16 PCP CR 3 6030
devices, therefore 16 communication registers and 24 6031 Index
configuration registers are supported.
6032 Subindex
Example: In order to read object 5FE0hex of an
6033 Invoke ID
IB IL RS 232 with communication reference 4, first set the
configuration registers (6041 - 6043) to the desired values 6034 - 6039 Reserved
with the fc16 command (e.g., 6041 index: 5FE0hex, 6042 CR 4 6040
subindex: 0hex, 6043 invoke ID: 0hex). The fc3 command 6041 Index
can then be used to read 29 words via communication 6042 Subindex
register 6040. 6043 Invoke ID
A Modbus function is only ever used for read/write access to 6044 - 6049 Reserved
a PCP index. For example, the fc3 command cannot be
used to read 20 words from registers 6020 to 6039.
... ... ... ...
The communication register contains a different value range
due to the selected values of the register and the terminal CR 16 6160
used. Therefore, the IB IL RS 232 terminal, for example,
6161 Index
has three different PCP objects: two objects are one word
long, but the third is 29 words long. The three configuration 6162 Subindex
registers can be read/written with a single Modbus 6163 Invoke ID
command. An attempt to access a reserved register 6164 - 6169 Reserved
generates an exception response. CR 17 6170
6171 Index
6172 Subindex
6173 Invoke ID
6174 - 6179 Reserved
7275_en_05 PHOENIX CONTACT 30
IL ETH BK DI8 DO4 2TX-PAC
14.2 Transmitting an odd number of data bytes via 15 Device Driver Interface (DDI)
PCP (firmware version 1.30 or later)
The IL ETH BK DI8 DO4 2TX-PAC bus coupler supports
The Modbus functions allow you to exchange data words
access via the Device Driver Interface (DDI).
with PCP devices.
Using bus couplers with firmware version <1.30, it was not A driver for Windows NT, Windows 2000, and
possible to access odd-length communication objects. Windows XP can be downloaded at
Firmware version 1.30 includes the Ignore last byte option. www.phoenixcontact.net/catalog under the name
This option enables odd-length communication objects to "Ethernet Driver 2.0. exe". Drivers for other
be transmitted. operating systems are available from
Phoenix Contact on request.
To transmit an odd number of PCP bytes, set bit 0 in the high
byte of the Invoke-ID PCP configuration register. This Using this interface requires the appropriate driver to be
leads to the fact that the low byte of the last Modbus data installed on the host. For a detailed description of the
word written or to be read is excluded from PCP services, please refer to the "Driver reference manual for
transmission. G4-based controller boards using PC bus and Ethernet",
see Documentation on page 3.
The PCP-Invoke-ID is an 8-bit date, thus allowing
The following services are supported:
the high byte of this Modbus register to be used
for this function.
15.1 Services for remote access to the DDI
This change is backward compatible, since older
firmware versions do not evaluate the bit. DDI_DevOpenNode ( )
DDI_DevCloseNode ( )
Example 1: Writing 15 data bytes to the 5FE0hex object of
the PCP device with communication reference 2 (CR 2) DDI_DTI_ReadData ( )
DDI_DTI_WriteData ( )
Initialize the configuration register of CR 2:
DDI_DTI_ReadWriteData ( )
Modbus Register name Value
DDI_MXI_SndMessage ( )
address [hex]
DDI_MXI_RcvMessage ( )
6021 CR 2 index 5FE0
GetIBSDiagnostic ( )
6022 CR 2 subindex 0
6023 CR 2 Invoke-ID 100 15.2 Connection and error monitoring
Eight data words will then be written to the CR 2 communi- ETH_SetDTITimeoutCtrl ( )
cation register (Modbus address 6020). ETH_ClearDTITimeoutCtrl ( )
In this example, the low byte of the last data word written to ETH_SetNetFail ( )
the Modbus address 6020 will not be transmitted to the PCP ETH_GetNetFailStatus ( )
device with CR 2.
ETH_ClrNetFailStatus ( )
Example 2: Reading 11 data bytes from the 5FE0(hex) ob- ETH_SetNetFailMode ( )
ject of the PCP device with communication reference 4
ETH_GetNetFailMode ( )
(CR 4)
Initialize the configuration register of CR 4: 15.3 Services for process data monitoring
Modbus Register name Value ETH_ActivatePDinMonitoring ( )
address [hex]
ETH_DeactivatePDinMonitoring ( )
6041 CR 4 index 5FE0
6042 CR 4 subindex 0
6043 CR 4 Invoke-ID 100
Six data words will then be read from the CR 4 communica-
tion register (Modbus address 6040).
In this example, the last data byte read by the PCP device
will be transmitted in the high byte of the last Modbus data
word.
7275_en_05 PHOENIX CONTACT 31
IL ETH BK DI8 DO4 2TX-PAC
16 Firmware services
As it is not necessary to use each firmware service in both 1. The service is not permitted in this mode and is rejected
operating modes (expert mode active/inactive), the with a negative acknowledgment.
following table indicates the assignment of the services to 2. The service is executed and terminated with a positive
the operating modes. If the services are not used as acknowledgment. The effect of this service is removed
specified in the table, this may cause the firmware to behave by the firmware. Supported firmware services that can
as follows: be used in every operating mode:
Code Services Function
0309hex Read_Configuration Reads various entries of the configuration directory
Used_Attributes: 0002hex = Device code
030Bhex Complete_Read_Configuration Reads all device data for a configuration
Used_Attributes: 0002hex = Device code
0315hex Read_Device_State Reads status of local bus devices
Device_State_Mask: 0008hex = Peripheral fault
0316hex Get_Error_Info Requests additional error information
032Ahex Get_Version_Info Reads version information
032Bhex Get_Diag_Info Reads local bus counters
Diag_Info_Attr: 0004hex = Global_Count
0351hex Read_Value Reads system parameters
0714hex Control_Device_Function Sends control commands to local bus devices
Device_Function:
0003hex = Conf_Dev_Err
0004hex = Conf_Dev_Err_All
0750hex Set_Value Assigns new values to system parameters
0760hex Confirm_Diagnostics Updates the diagnostic display and registers
0956hex Reset_Controller_Board Resets the controller board
Supported firmware services that are only available in expert mode:
Code Services Function
0306hex Initiate_Load_Configuration Loads a configuration frame (extension not supported)
0307hex Load_Configuration Transmits the device data for a configuration
Used_Attributes: 0002hex = Device code
030Ahex Complete_Load_Configuration Transmits all device data for a configuration
Used_Attributes: 0002hex = Device code
0308hex Terminate_Load_Configuration Terminates the transmission of configuration data
only for automatic parameterization
030Chex Delete_Configuration Deletes a configuration
030Ehex Control_Parameterization Starts or ends the parameterization phase
0701hex Start_Data_Transfer Starts data transmission
0710hex Create_Configuration Reads in the connected configuration
0711hex Activate_Configuration Compares the saved and connected configuration
1303hex Alarm_Stop Resets the local bus
For additional information about firmware services, please refer to the IBS SYS FW G4 UM E user manual.
7275_en_05 PHOENIX CONTACT 32
IL ETH BK DI8 DO4 2TX-PAC
System parameters for the "Set_Value" (750hex) and "Read_Value" (351hex) services
Variable ID System parameter Value/note
0104hex Diagnostic status register (16-bit word) Read only
0105hex Diagnostic parameter register 1 (16-bit word) Read only
010Dhex Diagnostic parameter register 2 (16-bit word) Read only
2216hex Current PD cycle time (32-bit word) Read only
2240hex Plug and play mode (32-bit word) 0: Plug and play mode inactive
1: Plug and play mode active
2275hex Expert mode (32-bit word) 0: Expert mode inactive
1: Expert mode active
2277hex Fault response mode (32-bit word) See page 20
2293hex Process data watchdog timeout (32-bit word) See page 21
17 PCP communication
17.1 Transmission of parameter data 17.2 Supported PCP commands
Intelligent devices such as frequency inverters or controllers The MXI interface of the DDI can be used to send the
exchange process data with each other and also exchange following PCP commands.
larger volumes of data with the control system. Such data Service Service code
can, for example, be used for the startup phase of a
Initiate_Request 008Bhex
machine. This type of parameter data rarely changes and is
transmitted when necessary. Abort_Request 088Dhex
The INTERBUS protocol can transmit process data and Read_Request 0081hex
complex data records (parameter data) simultaneously. The Write_Request 0082hex
comprehensive parameter data is divided into smaller units, Information_Report_Request 0885hex
transmitted and then recombined. Status_Request 0083hex
In the INTERBUS system, the Peripherals Communication Identify_Request 0087hex
Protocol (PCP) divides the parameter data into individual Load_Kbl_Par_Loc_Request 0264hex
segments. After the transmission it recombines the data.
Read_Kbl_Loc_Request 0203hex
PCP refers to the protocol software. This software provides
the necessary services for connection establishment and
connection abort, etc.
For detailed information on PCP communication,
please refer to the IBS SYS PCP G4 UM E user
manual.
Please note that a maximum of 16 PCP terminals
can be connected to a bus coupler.
7275_en_05 PHOENIX CONTACT 33
IL ETH BK DI8 DO4 2TX-PAC
17.3 Configuration of the PCP PDU size 18 Simple Network Management
The standard PDU size for communication with all Protocol - SNMP
Phoenix Contact Inline devices is 64 bytes in the transmit
and receive direction. The bus coupler supports SNMP v1 and v2c.
System couplers such as the ILC 200 UNI have Management Information Base - MIB
configurable PDU sizes. If a different size will be configured
and an IL ETH BK DI8 DO4 2TX-PAC is used to The corresponding current MIBs are available on
communicate with the size, the bus coupler must also be the Internet at
configured to the new values. www.phoenixcontact.net/catalog.
For the object descriptions, please refer to the ASN1
descriptions of this product. These can be found on the
Internet at www.phoenixcontact.net/catalog.
The password for read access is "public" and cannot be
changed. By default upon delivery, the password for read/
write access is "private" and can be modified at any time.
Figure 20 PCP configuration in web-based management
7275_en_05 PHOENIX CONTACT GmbH & Co. KG 32823 Blomberg Germany 34
www.phoenixcontact.com
Você também pode gostar
- Il Eth BK Di8 Do4 2Tx-PacDocumento37 páginasIl Eth BK Di8 Do4 2Tx-PacAjay JatodeAinda não há avaliações
- DB en Il PN BK Di8 Do4 2tx-Pac PDFDocumento20 páginasDB en Il PN BK Di8 Do4 2tx-Pac PDFNakpane SonhayeAinda não há avaliações
- Ib Il Rs Uni (-2Mbd) - Pac: Inline Communication Terminal For Serial Data TransmissionDocumento25 páginasIb Il Rs Uni (-2Mbd) - Pac: Inline Communication Terminal For Serial Data TransmissionGuilherme CeveseAinda não há avaliações
- Ib Il Ai 8/Sf (-2Mbd) - Pac: Inline, Analog Input Terminal, Analog Inputs: 8 (For Connection of Voltage or Current Signals)Documento35 páginasIb Il Ai 8/Sf (-2Mbd) - Pac: Inline, Analog Input Terminal, Analog Inputs: 8 (For Connection of Voltage or Current Signals)Nestor Dino DominiciAinda não há avaliações
- Ib Il Rs 485-Eco: Inline ECO Communication Terminal For Serial Data Transmission (RS-485)Documento14 páginasIb Il Rs 485-Eco: Inline ECO Communication Terminal For Serial Data Transmission (RS-485)SebastianAinda não há avaliações
- DB en Ib Il 24 Do 16 5559 en 07Documento13 páginasDB en Ib Il 24 Do 16 5559 en 07EmreÖzbelliAinda não há avaliações
- YBM 1200 ManualDocumento31 páginasYBM 1200 Manualmartinaleguzzo100% (1)
- R911324351 04 R IL-DpppDocumento14 páginasR911324351 04 R IL-DpppSantiagoAinda não há avaliações
- ZM1-Development Board User ManualDocumento11 páginasZM1-Development Board User ManualMark MccreaAinda não há avaliações
- Datasheet F2M03GLADocumento46 páginasDatasheet F2M03GLALucosidEAinda não há avaliações
- Anexo ACaracteristicas Tecnicas de Los EquiposDocumento18 páginasAnexo ACaracteristicas Tecnicas de Los EquiposAlvaroZolaAinda não há avaliações
- 4 Channel Relay Board-BluetoothDocumento12 páginas4 Channel Relay Board-Bluetoothbakht sikandarAinda não há avaliações
- DS Um232h-BDocumento14 páginasDS Um232h-BmoabdolyAinda não há avaliações
- IB IL 24 DO 8 ... : Inline Terminal With Eight Digital OutputsDocumento9 páginasIB IL 24 DO 8 ... : Inline Terminal With Eight Digital OutputsVasil StoyanovAinda não há avaliações
- Hatteland Display Technical ManualDocumento26 páginasHatteland Display Technical Manualrohit sonawaneAinda não há avaliações
- T BOX ManualDocumento26 páginasT BOX ManualVlady TeoAinda não há avaliações
- Icop-6071lv ManualDocumento35 páginasIcop-6071lv ManualjujonetAinda não há avaliações
- DB en Ib Il 24 Di 16 5553 en 07Documento12 páginasDB en Ib Il 24 Di 16 5553 en 07FallAinda não há avaliações
- Vsx-6115-V2: DM&P Vortex86Sx 300Mhz Tiny Cpu ModuleDocumento28 páginasVsx-6115-V2: DM&P Vortex86Sx 300Mhz Tiny Cpu ModuleJose Luis FernandezAinda não há avaliações
- Fujikura - Optical ComponentsDocumento42 páginasFujikura - Optical ComponentsSeung-Min LeeAinda não há avaliações
- App 20 HwGuide Evm-CE2Documento7 páginasApp 20 HwGuide Evm-CE2Angie FoleyAinda não há avaliações
- Future Technology Devices International LTD: Datasheet Chipi-X CableDocumento11 páginasFuture Technology Devices International LTD: Datasheet Chipi-X CableDharmendra Kumar YadavAinda não há avaliações
- Phoenix Contat (PLC)Documento8 páginasPhoenix Contat (PLC)d86299878Ainda não há avaliações
- GL811EDocumento37 páginasGL811EJuanpere2Ainda não há avaliações
- User'S Manual of Intel H61 Express Chipset Based M/B For LGA 1155 Intel Core ProcessorDocumento33 páginasUser'S Manual of Intel H61 Express Chipset Based M/B For LGA 1155 Intel Core ProcessorSergio VivasAinda não há avaliações
- BT PB - en - 1.3 - 08.09Documento97 páginasBT PB - en - 1.3 - 08.09euqehtbAinda não há avaliações
- ED 2002 125NexgenieBaseUnitNG16DLNG14RLInstallationManualDocumento2 páginasED 2002 125NexgenieBaseUnitNG16DLNG14RLInstallationManualAmit Chaturvedi100% (1)
- VFD PL 200 User ManualDocumento32 páginasVFD PL 200 User ManualMaria Del Pilar CaicedoAinda não há avaliações
- LTRT-22018 MP-202 - MP-26x and MP-27x Release Notes Ver. 4.4.3Documento36 páginasLTRT-22018 MP-202 - MP-26x and MP-27x Release Notes Ver. 4.4.3Anonymous ygpt13y0ASAinda não há avaliações
- ProtectionDocumento44 páginasProtectionMarcos Polos100% (1)
- Test1 and Roller10-20pn - LisDocumento31 páginasTest1 and Roller10-20pn - LisЕвгений СеровAinda não há avaliações
- User'S Manual of Intel H61 Express Chipset: M/B For Intel LGA 1155 ProcessorsDocumento19 páginasUser'S Manual of Intel H61 Express Chipset: M/B For Intel LGA 1155 ProcessorsnobodikAinda não há avaliações
- VHB OFR 1122 442Documento5 páginasVHB OFR 1122 442Manikandan SWMSAinda não há avaliações
- CP 9131PLC System User Manual V1.00 2022.05.2708 25Documento59 páginasCP 9131PLC System User Manual V1.00 2022.05.2708 25Electricitat-Electrònica IES Milà i FontanalsAinda não há avaliações
- Cb-Olx425 Electrical Mechanical Data Sheet: Document RevisionDocumento44 páginasCb-Olx425 Electrical Mechanical Data Sheet: Document RevisionpastiacristianAinda não há avaliações
- NDS3306I 6 in 1 ISDB-T Modulator User Manual 2018.11.26Documento24 páginasNDS3306I 6 in 1 ISDB-T Modulator User Manual 2018.11.26jhunniorAinda não há avaliações
- G308a HmiDocumento8 páginasG308a HmiJuan Diego Chavarría RojasAinda não há avaliações
- Fiber Optic Ieee c37.94 g.703 E1 Multiplexer Pdf2 133Documento18 páginasFiber Optic Ieee c37.94 g.703 E1 Multiplexer Pdf2 133nnt236Ainda não há avaliações
- DB en Ib Il 24 Do 16 5559 en 04Documento9 páginasDB en Ib Il 24 Do 16 5559 en 04Gergő FaragóAinda não há avaliações
- h0440 UserguideDocumento11 páginash0440 UserguideYonathanAinda não há avaliações
- Features: Multiple Video Interface, Fanless Embedded Box ComputerDocumento3 páginasFeatures: Multiple Video Interface, Fanless Embedded Box ComputerDavidZarcoAinda não há avaliações
- COM-2P (PCI) H COM-4P (PCI) H: RS-232C 2ch Serial I/O Board With IsolationDocumento5 páginasCOM-2P (PCI) H COM-4P (PCI) H: RS-232C 2ch Serial I/O Board With IsolationAlejandro Cáceres Navarro (Ingenova)Ainda não há avaliações
- Fiber Optic SplittersDocumento60 páginasFiber Optic SplitterslailhAinda não há avaliações
- IWC Manual Issue 2Documento18 páginasIWC Manual Issue 2woody8112Ainda não há avaliações
- JUMPtec Intelligent LVDS InterfaceDocumento11 páginasJUMPtec Intelligent LVDS InterfaceDalek SkaroAinda não há avaliações
- P142 OrderFormDocumento11 páginasP142 OrderFormЖорж КаназирскиAinda não há avaliações
- Video PDFDocumento98 páginasVideo PDFJesusAinda não há avaliações
- Mmo 71533445 1559735089 2495 10627Documento35 páginasMmo 71533445 1559735089 2495 10627Braulio Alvarado OlorteguiAinda não há avaliações
- A1000 Installation ManualDocumento12 páginasA1000 Installation ManualMuti FutiAinda não há avaliações
- 07 KT 97Documento54 páginas07 KT 97max_ingAinda não há avaliações
- Description of The System: DIGISTAR II Command UnitDocumento4 páginasDescription of The System: DIGISTAR II Command UnitkratmelAinda não há avaliações
- IIB2400 DatasheetDocumento1 páginaIIB2400 DatasheetFrançois PhilippAinda não há avaliações
- Texas Instruments TUSB3410Documento101 páginasTexas Instruments TUSB3410sergioAinda não há avaliações
- Esp32 Solo 1 Datasheet En-1384705Documento27 páginasEsp32 Solo 1 Datasheet En-1384705Inventor TestAinda não há avaliações
- 03 13003 enDocumento4 páginas03 13003 enImam MunandarAinda não há avaliações
- Network Termination Unit STU2: Always Up-To-DateDocumento2 páginasNetwork Termination Unit STU2: Always Up-To-DateНатальяAinda não há avaliações
- SimpleDocumento24 páginasSimpleWonbae ChoiAinda não há avaliações
- NI Tutorial 2895 enDocumento3 páginasNI Tutorial 2895 enalibob78Ainda não há avaliações
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Ainda não há avaliações
- Radio Shack TRS-80 Expansion Interface: Operator's Manual Catalog Numbers: 26-1140, 26-1141, 26-1142No EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual Catalog Numbers: 26-1140, 26-1141, 26-1142Ainda não há avaliações
- 3S Lift Material Hoist PDFDocumento4 páginas3S Lift Material Hoist PDFAP Advisory BVAinda não há avaliações
- Tangent Delta TesterDocumento27 páginasTangent Delta TesterNguyen Linh TuanAinda não há avaliações
- 6SL3244-0BB12-1BA1 Datasheet en PDFDocumento1 página6SL3244-0BB12-1BA1 Datasheet en PDFchmatias3Ainda não há avaliações
- Ca3094, Ca3094A, Ca3094B: 30Mhz, High Output Current Operational Transconductance Amplifier (Ota) FeaturesDocumento14 páginasCa3094, Ca3094A, Ca3094B: 30Mhz, High Output Current Operational Transconductance Amplifier (Ota) FeaturesHélio MandecoAinda não há avaliações
- ETD-SL-2T-I: Timer Relay With Adjustable Pulse and Pause TimesDocumento6 páginasETD-SL-2T-I: Timer Relay With Adjustable Pulse and Pause TimesviolorenoAinda não há avaliações
- PNOZ p1vp Operating Manual 20925-EN-10Documento23 páginasPNOZ p1vp Operating Manual 20925-EN-10João Mateus Cebola M. AcostaAinda não há avaliações
- + 1.2v To + 25v Adjustable RegulatorDocumento12 páginas+ 1.2v To + 25v Adjustable RegulatorSURESH CHANDRA ROUTAinda não há avaliações
- Astron Power SupplyDocumento8 páginasAstron Power Supplydmechanic8075Ainda não há avaliações
- User Manual: HGM7200/HGM7100 SeriesDocumento69 páginasUser Manual: HGM7200/HGM7100 Seriesnhocti007Ainda não há avaliações
- Animal Tracking and GPS SystemDocumento13 páginasAnimal Tracking and GPS Systemm niru50% (2)
- 3X1W Led Driver Solution Using AP3766Documento18 páginas3X1W Led Driver Solution Using AP3766mvaral_42Ainda não há avaliações
- MT S4000 EngDocumento8 páginasMT S4000 Engsamet gozubolAinda não há avaliações
- All "Error Codes" That Can Show Up in The Different Displays and Its DescriptionDocumento20 páginasAll "Error Codes" That Can Show Up in The Different Displays and Its DescriptionJosiasAinda não há avaliações
- Ear 864Documento1 páginaEar 864api-3833673Ainda não há avaliações
- Holybro Kakute F7Documento13 páginasHolybro Kakute F7antozoneAinda não há avaliações
- Pioneer Avic f900btDocumento187 páginasPioneer Avic f900btrapsz100% (1)
- A Research On Space Vector Modulation Strategy For Matrix Converter Under Abnormal Input-Voltage ConditionsDocumento12 páginasA Research On Space Vector Modulation Strategy For Matrix Converter Under Abnormal Input-Voltage Conditionslavanyaganesh83Ainda não há avaliações
- HD785-7 SEN01274-15 Shop Manual-1407-1607Documento201 páginasHD785-7 SEN01274-15 Shop Manual-1407-1607Muhammad RizqiAinda não há avaliações
- Service Manual RouterDocumento64 páginasService Manual RouterharyantoAinda não há avaliações
- Design of A Wireless Power Transfer System Using Inductive Coupling and MATLAB ProgrammingDocumento9 páginasDesign of A Wireless Power Transfer System Using Inductive Coupling and MATLAB Programmingvijay patilAinda não há avaliações
- In Any Lighting Conditions: Easy-to-Read DisplayDocumento2 páginasIn Any Lighting Conditions: Easy-to-Read DisplayFIRMANSYAHAinda não há avaliações
- SAMSUNG LIB Battery System For UPS Product Specification 136S 128SDocumento40 páginasSAMSUNG LIB Battery System For UPS Product Specification 136S 128Ssergiob63Ainda não há avaliações
- Current Transducer LF 510-S 500 ADocumento7 páginasCurrent Transducer LF 510-S 500 AAhmad Fahmi AriefAinda não há avaliações
- APPA 30 Series: The State-of-the-Art Clamp-On Measuring InstrumentsDocumento2 páginasAPPA 30 Series: The State-of-the-Art Clamp-On Measuring Instrumentsbudi0251Ainda não há avaliações
- EE Corporate CatalogDocumento28 páginasEE Corporate CatalogudhayAinda não há avaliações
- Yantai BKJ2 Marine Master-Slave ClockDocumento7 páginasYantai BKJ2 Marine Master-Slave ClockFront Crown100% (1)
- LGP32-14PL1 Rev3.1 PCB Eax65391401 Eax65693102Documento29 páginasLGP32-14PL1 Rev3.1 PCB Eax65391401 Eax65693102Andres AlegriaAinda não há avaliações
- OEMterexRT 130SSC Manual er22301RevDDocumento40 páginasOEMterexRT 130SSC Manual er22301RevDadan felipe romanAinda não há avaliações
- Sistema Electrico Volvo Vn-VhdusaDocumento192 páginasSistema Electrico Volvo Vn-VhdusaJessica Noriega SanguinoAinda não há avaliações
- Opa 4134Documento33 páginasOpa 4134CarlosReisAinda não há avaliações