Você também pode gostar
- Tetfund Astd Nomination Form11Documento1 páginaTetfund Astd Nomination Form11AJ Bala KiruAinda não há avaliações
- CDB 3082 Chemical Engineering Lab Iv: - Flame PropagationDocumento8 páginasCDB 3082 Chemical Engineering Lab Iv: - Flame PropagationBhinitha ChandrasagaranAinda não há avaliações
- Projects With Microcontrollers And PICCNo EverandProjects With Microcontrollers And PICCNota: 5 de 5 estrelas5/5 (1)
- Chapter 2 - Momentum - Transport-1Documento72 páginasChapter 2 - Momentum - Transport-1eshwar957_447169099Ainda não há avaliações
- The PIC Microcontroller: Your Personal Introductory CourseNo EverandThe PIC Microcontroller: Your Personal Introductory CourseNota: 1 de 5 estrelas1/5 (2)
- Exp - 2 Bubble Cap Distillation ColumnDocumento13 páginasExp - 2 Bubble Cap Distillation ColumnAdawiyah Al-jufri100% (1)
- Analysis of Salt Deposits From Keana LGA, Nassarawa State, NigeriaDocumento11 páginasAnalysis of Salt Deposits From Keana LGA, Nassarawa State, NigeriaMusa Balarabe AbdullahiAinda não há avaliações
- Distillation ColumnDocumento6 páginasDistillation ColumnArif HanafiAinda não há avaliações
- CHEM3002 Tutorial Sheet 3Documento1 páginaCHEM3002 Tutorial Sheet 3Sunmoon Al-HaddabiAinda não há avaliações
- Dynamic Simulation of A Crude Oil DistillationDocumento14 páginasDynamic Simulation of A Crude Oil DistillationAL-JABERI SADEQ AMEEN ABDO / UPMAinda não há avaliações
- Gas UnitDocumento4 páginasGas UnitZalina SamsuddinAinda não há avaliações
- Assignment 1 PDFDocumento1 páginaAssignment 1 PDFRoydia SimanAinda não há avaliações
- Exp-40 Part2Documento22 páginasExp-40 Part2Ahmet Samet ÖzdilekAinda não há avaliações
- H W5Documento1 páginaH W5Bahadır KayaAinda não há avaliações
- CHE522 1st ClassDocumento15 páginasCHE522 1st ClassAnas IqmalAinda não há avaliações
- Discussion Exp 1 Plate & FrameDocumento1 páginaDiscussion Exp 1 Plate & FrameNur AsiahAinda não há avaliações
- Process Filtration & EquipmentDocumento8 páginasProcess Filtration & EquipmentleslieAinda não há avaliações
- Exp 4 InstrumentationDocumento14 páginasExp 4 Instrumentationizzat ezmanAinda não há avaliações
- Simulink Development of Single Effect Evaporator Using MatlabDocumento12 páginasSimulink Development of Single Effect Evaporator Using MatlabRhea MambaAinda não há avaliações
- Process Control & Instrumentations CEV 544 PrelabDocumento9 páginasProcess Control & Instrumentations CEV 544 PrelabFaradilah Binti Ajma'inAinda não há avaliações
- Exp - S10A - Forced Draft Tray DryerDocumento6 páginasExp - S10A - Forced Draft Tray DryerSenthilNathanAinda não há avaliações
- NNPCDocumento42 páginasNNPCAdamu DaudaAinda não há avaliações
- CHME324-B-Lab Manual Fall 2016 (Ahmed Elkhatat)Documento99 páginasCHME324-B-Lab Manual Fall 2016 (Ahmed Elkhatat)bebsybiswezAinda não há avaliações
- Experiment 2 Cooling TowerDocumento2 páginasExperiment 2 Cooling TowerEdin AbolenciaAinda não há avaliações
- Study On A New Wet Flue Gas Desulfurization Method Based On The Buns 2017 FuDocumento5 páginasStudy On A New Wet Flue Gas Desulfurization Method Based On The Buns 2017 FuDiana ReyesAinda não há avaliações
- Group 1 Mass & Energy BalanceDocumento98 páginasGroup 1 Mass & Energy BalanceDianah NajeebAinda não há avaliações
- Example of PID Tuning ExampleDocumento31 páginasExample of PID Tuning Examplemhd badhrul bin baharAinda não há avaliações
- CPB30004 Process Dynamics and Control Experiment 5: Heat Exchanger Process Control Lab ReportDocumento24 páginasCPB30004 Process Dynamics and Control Experiment 5: Heat Exchanger Process Control Lab ReportSiti Hajar Mohamed100% (1)
- Essay Kerjaya AkuDocumento2 páginasEssay Kerjaya AkuAmdn AhmdAinda não há avaliações
- Introduction To Course12 Session 1Documento18 páginasIntroduction To Course12 Session 1Huy Nguyen100% (1)
- Fully Report Vs-Group 5Documento25 páginasFully Report Vs-Group 5Faradilah Binti Ajma'inAinda não há avaliações
- Liquid Liquid ExtractionDocumento36 páginasLiquid Liquid ExtractionamirnimoAinda não há avaliações
- Difference Between Continuous and Batch ProcessDocumento4 páginasDifference Between Continuous and Batch ProcessPresupuesto 2020Ainda não há avaliações
- Material Balance of Styrene Production PDocumento12 páginasMaterial Balance of Styrene Production PSteve WanAinda não há avaliações
- CHE506 - Lab Report On Continuous Stirre PDFDocumento29 páginasCHE506 - Lab Report On Continuous Stirre PDFMuhammad AimanAinda não há avaliações
- Notch and Weirs Che 413 PDFDocumento33 páginasNotch and Weirs Che 413 PDFAeyrul KhairulAinda não há avaliações
- Sep Lab Exp 1 LatestDocumento20 páginasSep Lab Exp 1 LatestChan Chun ChenAinda não há avaliações
- CELCHA2 Study GuidesDocumento7 páginasCELCHA2 Study GuidesEsther100% (1)
- Introduction To Separation Process EngineeringDocumento12 páginasIntroduction To Separation Process EngineeringAna K. CalderónAinda não há avaliações
- Mobily Case StudyDocumento4 páginasMobily Case StudySteve CromptonAinda não há avaliações
- Transport Phenomena Lab ManualDocumento59 páginasTransport Phenomena Lab ManualPranjal AnandAinda não há avaliações
- Faculty of Chemical EngineeringDocumento32 páginasFaculty of Chemical EngineeringArif HanafiAinda não há avaliações
- Lab Report Cstr-Intro Appa ProceDocumento6 páginasLab Report Cstr-Intro Appa Procesolehah misniAinda não há avaliações
- Heat Lab 4Documento8 páginasHeat Lab 4Rubanraj RajendrenAinda não há avaliações
- Reactor Design Sample ExamDocumento7 páginasReactor Design Sample ExamAugustine BrockAinda não há avaliações
- Level Flow ControlDocumento6 páginasLevel Flow Controlarpit gargAinda não há avaliações
- Total NH NH NH NH 53306.524011 Q (KW) - 145.23864592945: Energy Balance For ConverterDocumento3 páginasTotal NH NH NH NH 53306.524011 Q (KW) - 145.23864592945: Energy Balance For ConverterAhmed Qutb AkmalAinda não há avaliações
- Heat and Mass Transfer ManualDocumento30 páginasHeat and Mass Transfer ManualSushil ThakkarAinda não há avaliações
- S-Lab Manual Exp 3 - Air Flow Process ControlDocumento12 páginasS-Lab Manual Exp 3 - Air Flow Process Controlarif arifinAinda não há avaliações
- Boiling PDFDocumento11 páginasBoiling PDFRahul Kotadiya100% (1)
- Chem 214 Homework #2 Due February 22, 2021 by 11:59 PM On MoodleDocumento2 páginasChem 214 Homework #2 Due February 22, 2021 by 11:59 PM On MoodleNguyệt BìnhAinda não há avaliações
- CHEN3005 Process Instrumentation and ControlDocumento4 páginasCHEN3005 Process Instrumentation and ControlVincent Ys TanAinda não há avaliações
- g3 Thermodynamics ExperimentsDocumento42 páginasg3 Thermodynamics Experimentsarda Максим50% (2)
- Modeling and Simulation of CSTR For Manufacture of Propylene GlycolDocumento6 páginasModeling and Simulation of CSTR For Manufacture of Propylene Glycolantoojacome100% (1)
- Sec01 - GroupE - (Unsteady State Heat Transfer)Documento11 páginasSec01 - GroupE - (Unsteady State Heat Transfer)Dzulfadhly ShaariAinda não há avaliações
- Refrigeration Unit (DONE)Documento33 páginasRefrigeration Unit (DONE)Eimint Mansor Applez100% (1)
- PC Lab ManualDocumento47 páginasPC Lab ManualAoiAinda não há avaliações
- Lab 09 PDFDocumento8 páginasLab 09 PDFAbdul Rehman AfzalAinda não há avaliações
- Chapter 2Documento9 páginasChapter 2Bhimsen ShresthaAinda não há avaliações
- CHAPTER 1 EXE SolutionDocumento5 páginasCHAPTER 1 EXE SolutionBhimsen ShresthaAinda não há avaliações
- Exercises: The Accounting Cycle: During The PeriodDocumento4 páginasExercises: The Accounting Cycle: During The PeriodBhimsen ShresthaAinda não há avaliações
- MISY - 3433 - Exam2 - Version - Spring 2021 To PostDocumento8 páginasMISY - 3433 - Exam2 - Version - Spring 2021 To PostBhimsen ShresthaAinda não há avaliações
- Product Name:-TRX3010: Overall Cost of ProductionDocumento2 páginasProduct Name:-TRX3010: Overall Cost of ProductionBhimsen ShresthaAinda não há avaliações
- Modelling and Analysis of Heavy Vehicle Chassis Frame Made by Using Carbon Fiber and Composite Material: A Comparative Study.Documento9 páginasModelling and Analysis of Heavy Vehicle Chassis Frame Made by Using Carbon Fiber and Composite Material: A Comparative Study.Bhimsen ShresthaAinda não há avaliações
- 2007-2012 Complete List 4th Year Projects Sept 2017Documento149 páginas2007-2012 Complete List 4th Year Projects Sept 2017Bhimsen ShresthaAinda não há avaliações
- Closed-Loop Systems: SystemDocumento9 páginasClosed-Loop Systems: SystemBhimsen ShresthaAinda não há avaliações
- B1-1.Article 01InternationalJournalofMultidisciplinaryResearchandAdvancesinEngineering Avril2013Documento13 páginasB1-1.Article 01InternationalJournalofMultidisciplinaryResearchandAdvancesinEngineering Avril2013Bhimsen ShresthaAinda não há avaliações
- Cross-Section and Material Optimization of An Automotive Chassis Using FEADocumento13 páginasCross-Section and Material Optimization of An Automotive Chassis Using FEABhimsen ShresthaAinda não há avaliações
- Static Analysis of Truck Chassis Using Different MaterialsDocumento12 páginasStatic Analysis of Truck Chassis Using Different MaterialsBhimsen ShresthaAinda não há avaliações
- 17042017DMM-2 QB (2)Documento8 páginas17042017DMM-2 QB (2)Bhimsen ShresthaAinda não há avaliações
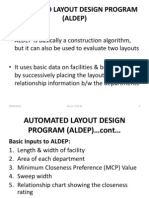
- AldepDocumento10 páginasAldepSankalp BhatiyaAinda não há avaliações
- Signed - Course HandoutDocumento50 páginasSigned - Course HandoutBhimsen ShresthaAinda não há avaliações
- 15me3111 (Fem) - Test 04 - Assn Question BankDocumento3 páginas15me3111 (Fem) - Test 04 - Assn Question BankBhimsen ShresthaAinda não há avaliações
- MATLAB Results Case 1: Response of The System To Step Input With Out Controller With ControllerDocumento7 páginasMATLAB Results Case 1: Response of The System To Step Input With Out Controller With ControllerBhimsen ShresthaAinda não há avaliações
- CocACOLA REPORTDocumento15 páginasCocACOLA REPORTBhimsen ShresthaAinda não há avaliações
- Analogue To Digital Conversion:-: Procedure For ADCDocumento5 páginasAnalogue To Digital Conversion:-: Procedure For ADCBhimsen ShresthaAinda não há avaliações
- 01 KDOM Course HandoutDocumento14 páginas01 KDOM Course HandoutBhimsen ShresthaAinda não há avaliações
- MSM (15-ME2105) Course Handout-01DEC 2016Documento25 páginasMSM (15-ME2105) Course Handout-01DEC 2016Bhimsen ShresthaAinda não há avaliações
- Project ListDocumento40 páginasProject ListBhimsen ShresthaAinda não há avaliações
- Level 50 - How Can CSP Partners Build A Business With AzureDocumento56 páginasLevel 50 - How Can CSP Partners Build A Business With Azureaki koshaAinda não há avaliações
- Sy0 601 04Documento24 páginasSy0 601 04marwen hassenAinda não há avaliações
- MANDATORYDocumento7 páginasMANDATORYkamlesh yadavAinda não há avaliações
- Comsol PricelistDocumento4 páginasComsol PricelistKalipada SenAinda não há avaliações
- Mei Cashflow SC / SC Advance Operation & Maintenance ManualDocumento14 páginasMei Cashflow SC / SC Advance Operation & Maintenance ManualNoelAinda não há avaliações
- 1250Documento1 página1250Mijin28Ainda não há avaliações
- Familiarization of Measuring Instruments and Tools HandoutDocumento9 páginasFamiliarization of Measuring Instruments and Tools HandoutVineeth WilsonAinda não há avaliações
- AdaniDocumento2 páginasAdaniathinabebaAinda não há avaliações
- Bova Futura Electrical System ManualDocumento40 páginasBova Futura Electrical System ManualmagzigioAinda não há avaliações
- Science Class 6 Chapter 12 Ques AnswerDocumento2 páginasScience Class 6 Chapter 12 Ques Answerwonders of danceAinda não há avaliações
- Performance Improvement of Alternators With SwitchDocumento9 páginasPerformance Improvement of Alternators With SwitchfatihAinda não há avaliações
- ScrewbnDocumento15 páginasScrewbnDeepika-deepix AroraAinda não há avaliações
- Unit I - Basics of C ProgrammingDocumento44 páginasUnit I - Basics of C ProgrammingHarsh DeshwalAinda não há avaliações
- ICMR - Reproducible AI in Medicine and HealthDocumento9 páginasICMR - Reproducible AI in Medicine and Healthvignesh16vlsiAinda não há avaliações
- UNIX PermissionsDocumento4 páginasUNIX PermissionsIngiaAinda não há avaliações
- 3PDocumento4 páginas3PWookie T BradfordAinda não há avaliações
- Training Manual: TOTAL STATION Handling Guideline: Traverse and Detailing Summery GuidelineDocumento10 páginasTraining Manual: TOTAL STATION Handling Guideline: Traverse and Detailing Summery Guidelinenilmo surveyorsAinda não há avaliações
- Generator Protection - 7UM85 - Technical DataDocumento42 páginasGenerator Protection - 7UM85 - Technical DataDoan Anh TuanAinda não há avaliações
- Multicast Routing Protocols in Wireless Sensor Networks (WSNS)Documento9 páginasMulticast Routing Protocols in Wireless Sensor Networks (WSNS)Journal of Computing100% (1)
- Chapter 3Documento74 páginasChapter 3Berhane KifleAinda não há avaliações
- What Are Batch Element Entry (BEE) ?: B E E (BEE)Documento20 páginasWhat Are Batch Element Entry (BEE) ?: B E E (BEE)arun9698Ainda não há avaliações
- Key CCNADocumento19 páginasKey CCNAnguyen hong sonAinda não há avaliações
- Android Project ReportDocumento38 páginasAndroid Project ReportSahil Adlakha57% (7)
- Pre Test - CC 201 - Introduction To Computing PDFDocumento2 páginasPre Test - CC 201 - Introduction To Computing PDFangel grace layaoAinda não há avaliações
- 5-HK5 Miniature Solenoid ValvesDocumento6 páginas5-HK5 Miniature Solenoid ValvessakscribAinda não há avaliações
- SAP - ABAP CDS Development User Guide: WarningDocumento91 páginasSAP - ABAP CDS Development User Guide: WarningKrishna Kshera SagareAinda não há avaliações
- Came Ozak Pedestrian CatalogDocumento116 páginasCame Ozak Pedestrian Cataloghusamzaki7Ainda não há avaliações
- Ethics and RoboticsDocumento13 páginasEthics and Roboticspobeda8Ainda não há avaliações
- Darshan TradingDocumento61 páginasDarshan TradingShobha SinghAinda não há avaliações
- Nursing InformaticsDocumento7 páginasNursing Informaticsapi-19880840100% (1)