Você também pode gostar
- Algorithm Desc-Pass1Documento1 páginaAlgorithm Desc-Pass1Anonymous FPMwLUw8cAinda não há avaliações
- Jee Main Exam SyallabusDocumento10 páginasJee Main Exam SyallabusAnonymous FPMwLUw8cAinda não há avaliações
- Regulations For Approval Process 2011-12Documento27 páginasRegulations For Approval Process 2011-12Anil KumarAinda não há avaliações
- Contiguous Memory AllocationDocumento8 páginasContiguous Memory AllocationAnonymous FPMwLUw8cAinda não há avaliações
- 2018Documento32 páginas2018Anonymous FPMwLUw8cAinda não há avaliações
- FlynnsDocumento41 páginasFlynnsAnonymous FPMwLUw8cAinda não há avaliações
- Like Evolution of Any New Technology Is Preferably Meant To Protect, So The Ethics ofDocumento1 páginaLike Evolution of Any New Technology Is Preferably Meant To Protect, So The Ethics ofAnonymous FPMwLUw8cAinda não há avaliações
- LetterDocumento1 páginaLetterAnonymous FPMwLUw8cAinda não há avaliações
- Q No Questions Marks CO Module-1: Internal Assessment Test-I (15-16 Odd Sem)Documento2 páginasQ No Questions Marks CO Module-1: Internal Assessment Test-I (15-16 Odd Sem)Anonymous FPMwLUw8cAinda não há avaliações
- CIPE QuestionsDocumento13 páginasCIPE QuestionsAnonymous FPMwLUw8cAinda não há avaliações
- List of Question For UNIT 1 & 2Documento2 páginasList of Question For UNIT 1 & 2Anonymous FPMwLUw8cAinda não há avaliações
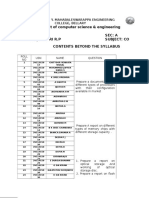
- Content Beyond The Syylabus-CoDocumento3 páginasContent Beyond The Syylabus-CoAnonymous FPMwLUw8cAinda não há avaliações
- CADDDocumento2 páginasCADDAnonymous FPMwLUw8cAinda não há avaliações
- Ec Dept FeedbackDocumento2 páginasEc Dept FeedbackAnonymous FPMwLUw8cAinda não há avaliações
- Sangan Sir PaperDocumento14 páginasSangan Sir PaperAnonymous FPMwLUw8cAinda não há avaliações
- Amar G Bose: An Acoustic Engineer and InventorDocumento3 páginasAmar G Bose: An Acoustic Engineer and InventorAnonymous FPMwLUw8cAinda não há avaliações
- Engg Part14 09Documento32 páginasEngg Part14 09Anonymous FPMwLUw8cAinda não há avaliações
- Pin Board ExperimentDocumento2 páginasPin Board ExperimentAnonymous FPMwLUw8cAinda não há avaliações
- Bellary Railway TimingsDocumento1 páginaBellary Railway TimingsAnonymous FPMwLUw8cAinda não há avaliações
- Project Diary: Rao Bahaddur Y Mahabaleshwarappa Engineering College, Bellary-4Documento24 páginasProject Diary: Rao Bahaddur Y Mahabaleshwarappa Engineering College, Bellary-4Anonymous FPMwLUw8cAinda não há avaliações
- Retrieval of Information Through Secure Support SystemsDocumento8 páginasRetrieval of Information Through Secure Support SystemsAnonymous FPMwLUw8cAinda não há avaliações
- InbformDocumento3 páginasInbformAnonymous FPMwLUw8cAinda não há avaliações
- IPEDocumento28 páginasIPEAnonymous FPMwLUw8cAinda não há avaliações
- Production and Operations ManagementDocumento21 páginasProduction and Operations ManagementGaurav218100% (4)
- Tech No Structural InterventionsDocumento68 páginasTech No Structural InterventionsAnonymous FPMwLUw8cAinda não há avaliações
- Knee ReplacementDocumento913 páginasKnee ReplacementAnonymous FPMwLUw8cAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- EG55F2-G2 Exam Paper May2011Documento10 páginasEG55F2-G2 Exam Paper May2011samprof4vwAinda não há avaliações
- Report - 1cumberland Close - Balcony FRPDocumento19 páginasReport - 1cumberland Close - Balcony FRPYousifAinda não há avaliações
- Test For Seismic QualificationDocumento13 páginasTest For Seismic QualificationdemisAinda não há avaliações
- SCI - AC - Elaboración de Hormigón Ligero A Partir de Arcilla Expandida Modificada Con RCGDocumento8 páginasSCI - AC - Elaboración de Hormigón Ligero A Partir de Arcilla Expandida Modificada Con RCGEstructuras MetalicasAinda não há avaliações
- Yusuf Rizal Fauzi, S.T., M.TDocumento29 páginasYusuf Rizal Fauzi, S.T., M.TYusuf Rizal FauziAinda não há avaliações
- Lecture 35 - 2 PDFDocumento23 páginasLecture 35 - 2 PDFabhishekAinda não há avaliações
- SP6 6 PDFDocumento220 páginasSP6 6 PDFsumankanthnelluri7Ainda não há avaliações
- AISC-327-05 Seismic Design ManualDocumento386 páginasAISC-327-05 Seismic Design ManualDavid Tovar GarcíaAinda não há avaliações
- On The Application of Dang Van Criterion To Rolling Contact FatigueDocumento6 páginasOn The Application of Dang Van Criterion To Rolling Contact FatiguejotempAinda não há avaliações
- Subsea Pipeline Installation Calculations - Volume-TwoDocumento276 páginasSubsea Pipeline Installation Calculations - Volume-Twophanikumar.sg5174Ainda não há avaliações
- Optimizing FSW Aluminium FatigueDocumento14 páginasOptimizing FSW Aluminium FatigueDaniel MarquesAinda não há avaliações
- Johnson-Cook Constitutive Model For OL 37 SteelDocumento5 páginasJohnson-Cook Constitutive Model For OL 37 Steelfabianobertoni4025Ainda não há avaliações
- 8.. - Study of Tin .FullDocumento8 páginas8.. - Study of Tin .FullTJPRC PublicationsAinda não há avaliações
- 28301x Week 1 SlidesDocumento62 páginas28301x Week 1 SlidesYasine YaquotAinda não há avaliações
- Pin-On-Disc Wear Investigation of Aisi 316L Stainless Steel With and Without Nickel Coating and Hardness TestDocumento28 páginasPin-On-Disc Wear Investigation of Aisi 316L Stainless Steel With and Without Nickel Coating and Hardness TestSave NatureAinda não há avaliações
- Flitched BeamDocumento14 páginasFlitched BeamAnonymous hprsT3WlP100% (1)
- Selvadurai 1984Documento11 páginasSelvadurai 1984Eduardo Alemany PerretAinda não há avaliações
- Webquest Spider SilkDocumento18 páginasWebquest Spider SilkKhab BaxAinda não há avaliações
- Metal Matrix CompositeDocumento29 páginasMetal Matrix CompositeSmart AkkiAinda não há avaliações
- BBC Last Stage Blades DesignDocumento12 páginasBBC Last Stage Blades Designantoniomambro100% (1)
- Structural Steel Design Data, Principles and ToolsDocumento56 páginasStructural Steel Design Data, Principles and ToolsBong Nimes CastilloAinda não há avaliações
- Reservoir Fluids Identification Using VpVs RatioDocumento6 páginasReservoir Fluids Identification Using VpVs RatiokawanalawieAinda não há avaliações
- Presentation On Piping Stress AnalysisDocumento17 páginasPresentation On Piping Stress AnalysisTasawwur TahirAinda não há avaliações
- All Units - 1456964101350 - 1457010306455 PDFDocumento554 páginasAll Units - 1456964101350 - 1457010306455 PDFDixit ShubhamAinda não há avaliações
- Bonga University: Engineering Material (Meng2091)Documento32 páginasBonga University: Engineering Material (Meng2091)Mul'isaa JireenyaaAinda não há avaliações
- Working Piles Design Report Rev 1Documento115 páginasWorking Piles Design Report Rev 1Nauman Mumtaz100% (3)
- Finite Project HangarDocumento65 páginasFinite Project HangarJad Antonios JelwanAinda não há avaliações
- The Effect of CarbonDocumento4 páginasThe Effect of CarbonkingstonAinda não há avaliações
- Physics ProjectDocumento21 páginasPhysics ProjectSathi NirajAinda não há avaliações
- ENGM032 Steel and Composite Bridge Design. Unit 5 Ultimate Load Method of Design For Plate Girders. Study Time 15 HoursDocumento18 páginasENGM032 Steel and Composite Bridge Design. Unit 5 Ultimate Load Method of Design For Plate Girders. Study Time 15 Hoursmocker1987Ainda não há avaliações