Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- 2018 01 05 - Dry Port Support RFP FINAL PDFDocumento6 páginas2018 01 05 - Dry Port Support RFP FINAL PDFsea_jazzAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- LetterDocumento1 páginaLettersea_jazzAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- L09 153Documento14 páginasL09 153sea_jazzAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
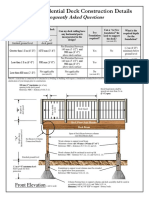
- Basic Deck Construction DetailsDocumento3 páginasBasic Deck Construction Detailssea_jazzAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Settlement of Shallow Foundations On Granular Soils PDFDocumento233 páginasSettlement of Shallow Foundations On Granular Soils PDFMUHAMMAD ALIAinda não há avaliações
- Numerical Procedure For Ship Hydroelastic AnalysisDocumento6 páginasNumerical Procedure For Ship Hydroelastic Analysissea_jazzAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Beam Design ManualDocumento28 páginasBeam Design ManualhangarrodAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elastic Foundation Young Modulus For Soils - 1Documento1 páginaElastic Foundation Young Modulus For Soils - 1sea_jazzAinda não há avaliações
- Corrosion ProtectionDocumento2 páginasCorrosion Protectionsea_jazzAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- PI Schafer CMMIgranteesconf Paper PDFDocumento4 páginasPI Schafer CMMIgranteesconf Paper PDFsea_jazzAinda não há avaliações
- Draft: Finite Element IDocumento73 páginasDraft: Finite Element ISiavash KhademAinda não há avaliações
- ch4 Mechanical Properties of Wood PDFDocumento46 páginasch4 Mechanical Properties of Wood PDFdan-gabiAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Iabmas MadeoDocumento8 páginasIabmas Madeosea_jazzAinda não há avaliações
- Neuberovo Pravilo PDFDocumento21 páginasNeuberovo Pravilo PDFMark JurichAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- L RFD Beam Load TablesDocumento76 páginasL RFD Beam Load TablesFederico.IoriAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- 25 01Documento5 páginas25 01Sopon SrirattanapiboonAinda não há avaliações
- Conversions of HSSDocumento7 páginasConversions of HSSsea_jazzAinda não há avaliações
- Bolt Dimensions Clearances Manual of Steel Construction1990Documento5 páginasBolt Dimensions Clearances Manual of Steel Construction1990sea_jazzAinda não há avaliações
- Shear Strength of High-Strength BoltsDocumento61 páginasShear Strength of High-Strength Boltsloox600Ainda não há avaliações
- Ce 479 Wood Design Nds 01 ConnectionsDocumento53 páginasCe 479 Wood Design Nds 01 Connectionssea_jazzAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Pros and Cons of Pushover AnalysisDocumento13 páginasPros and Cons of Pushover AnalysisMrugesh Shah100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- Awc NDS-2012Documento200 páginasAwc NDS-2012brianchen0671% (7)
- 223 STD Seismic Resistant Industrial Tanks SilosDocumento74 páginas223 STD Seismic Resistant Industrial Tanks Silossea_jazzAinda não há avaliações
- Hacking Structural Analysis. Join The CrewDocumento3 páginasHacking Structural Analysis. Join The CrewLuis C. Pérez TatoAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- 223 STD Seismic Resistant Industrial Tanks SilosDocumento74 páginas223 STD Seismic Resistant Industrial Tanks Silossea_jazzAinda não há avaliações
- Energy MethodsDocumento5 páginasEnergy MethodsNikkei Pfeiffer TadiliAinda não há avaliações
- Non-Linear Static Push Over AnalysisDocumento12 páginasNon-Linear Static Push Over Analysismrnicus100% (1)
- WSS Welding Symbols Study Guide LFDocumento88 páginasWSS Welding Symbols Study Guide LFsea_jazz100% (3)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Welding Procedure PreparationDocumento122 páginasWelding Procedure Preparationthe_badass1234100% (21)
- CA3632.Assignment 1 Questions. 2017 PDFDocumento5 páginasCA3632.Assignment 1 Questions. 2017 PDFwilson604Ainda não há avaliações
- Paper126c BalkemaDocumento344 páginasPaper126c Balkemamyusuf_engineerAinda não há avaliações
- Stress Assessment of Skew Composite Steel I-Girder Bridge: Kapil Kumar Gupta, Shashivendra DulawatDocumento9 páginasStress Assessment of Skew Composite Steel I-Girder Bridge: Kapil Kumar Gupta, Shashivendra DulawatkapilshwetaAinda não há avaliações
- Mechanics of Materials 4 Exam CoverageDocumento14 páginasMechanics of Materials 4 Exam CoverageJay Vee EstradaAinda não há avaliações
- Column End Support Reaction For Footing Design Under Service ConditionDocumento76 páginasColumn End Support Reaction For Footing Design Under Service ConditionINNOVATIVE ENGINEERAinda não há avaliações
- Structural Design Calculation ChecklistDocumento2 páginasStructural Design Calculation ChecklistTerry CheukAinda não há avaliações
- Column Stiffener DetailingDocumento31 páginasColumn Stiffener DetailingChristian Santamaria100% (1)
- Abutment JembatanDocumento7 páginasAbutment JembatanDewa PosthardAinda não há avaliações
- Analysis of Precast Multistoreyed Building - A Case Study: I J I R S E TDocumento9 páginasAnalysis of Precast Multistoreyed Building - A Case Study: I J I R S E TalexanderAinda não há avaliações
- Element 45 - 1538-NOTE 2Documento35 páginasElement 45 - 1538-NOTE 2hadeer youns100% (1)
- NSCP Definition of TermsDocumento25 páginasNSCP Definition of TermsArch Edwin DuazoAinda não há avaliações
- Mindlin Plate TheoryDocumento10 páginasMindlin Plate TheoryKunal RanjaneAinda não há avaliações
- BS 5977 1 1981 Lintels Method of Assessment of Load AMD 4796 PDFDocumento14 páginasBS 5977 1 1981 Lintels Method of Assessment of Load AMD 4796 PDFGhayas Jawed100% (1)
- Modeling Concrete Cracked Section Properties For Building Analysis - ETABS - Computers and Structures, IncDocumento3 páginasModeling Concrete Cracked Section Properties For Building Analysis - ETABS - Computers and Structures, IncbunkunAinda não há avaliações
- Base Plate For UpliftDocumento2 páginasBase Plate For UpliftmkbijuAinda não há avaliações
- Earthquake Design of Rectangular UndergroundDocumento8 páginasEarthquake Design of Rectangular UndergroundtrabajosicAinda não há avaliações
- FEMA 273 - Historic Steel & Cast IronDocumento44 páginasFEMA 273 - Historic Steel & Cast Ironjen.shively9409Ainda não há avaliações
- Barchip Technical Note: Best Practice For Testing Fibre Reinforced ShotcreteDocumento12 páginasBarchip Technical Note: Best Practice For Testing Fibre Reinforced ShotcreteMauro GelmiAinda não há avaliações
- Physics BSC QuestionDocumento31 páginasPhysics BSC QuestionIsha MohadikarAinda não há avaliações
- Double Girder Box Type EOT Crane DesignDocumento24 páginasDouble Girder Box Type EOT Crane DesignJeevan Hingne50% (2)
- Lecture 2 Types of Beams, Supports and LoadingDocumento26 páginasLecture 2 Types of Beams, Supports and Loadingshaheer asif100% (1)
- PDFDocumento141 páginasPDFVerica RanđelovićAinda não há avaliações
- Euler-Bernoulli Beam Theory - Simple English Wikipedia, The Free EncyclopediaDocumento2 páginasEuler-Bernoulli Beam Theory - Simple English Wikipedia, The Free EncyclopediaCordy Jourvel Itoua-TseleAinda não há avaliações
- Dry Floating y MuellesDocumento63 páginasDry Floating y MuellesFarihna JoseAinda não há avaliações
- EIL Civil Enginnering Question With AnswersDocumento19 páginasEIL Civil Enginnering Question With AnswersYogendra PatilAinda não há avaliações
- RC Part-I Flexure Review 2021 SVDocumento120 páginasRC Part-I Flexure Review 2021 SVangiearevalo24Ainda não há avaliações
- Analysis of Vertical Vessels Supported on LegsDocumento6 páginasAnalysis of Vertical Vessels Supported on Legssonali panditAinda não há avaliações
- Structural dynamics problems and solutionsDocumento8 páginasStructural dynamics problems and solutionsamadeus135Ainda não há avaliações
- (Springer Series in Reliability Engineering) Halil Karadeniz (Auth.) - Stochastic Analysis of Offshore Steel Structures - An Analytical PDFDocumento419 páginas(Springer Series in Reliability Engineering) Halil Karadeniz (Auth.) - Stochastic Analysis of Offshore Steel Structures - An Analytical PDFboboAinda não há avaliações