Você também pode gostar
- Statutory Construction Agpalo PDFDocumento70 páginasStatutory Construction Agpalo PDFYan Lean Dollison67% (3)
- Test Polymer Unit With Answer KeyDocumento4 páginasTest Polymer Unit With Answer KeyGellene GarciaAinda não há avaliações
- Vehicle Detecting and Grading MethodDocumento17 páginasVehicle Detecting and Grading MethodMitchAinda não há avaliações
- University of The Phillipines College of LawDocumento7 páginasUniversity of The Phillipines College of LawNathan MacayananAinda não há avaliações
- Segmentation and Extraction FeatureDocumento7 páginasSegmentation and Extraction FeatureMitchAinda não há avaliações
- MCQ in Est by S. Cuervo of ExcelDocumento96 páginasMCQ in Est by S. Cuervo of ExcelKurarin Jan Maikeru100% (4)
- 04 07 032 Optimization ProblemsDocumento7 páginas04 07 032 Optimization ProblemsMitchAinda não há avaliações
- Challenging Logic and Reasoning Problems PDFDocumento161 páginasChallenging Logic and Reasoning Problems PDFMalvado Aun Mas MalvadoAinda não há avaliações
- Image ProcessingDocumento30 páginasImage ProcessingMitchAinda não há avaliações
- Multiple Choice Questions in Communications EngineeringDocumento415 páginasMultiple Choice Questions in Communications Engineeringaldruino100% (6)
- Vehicle Detecting and Grading MethodDocumento17 páginasVehicle Detecting and Grading MethodMitchAinda não há avaliações
- 04-07-032 Optimization Problems PDFDocumento2 páginas04-07-032 Optimization Problems PDFMitchAinda não há avaliações
- Introduction To Microcontrollersd (1) - 2Documento35 páginasIntroduction To Microcontrollersd (1) - 2MitchAinda não há avaliações
- Cef DocumentationDocumento6 páginasCef DocumentationMitchAinda não há avaliações
- Laravel 5.0 DocumentationDocumento242 páginasLaravel 5.0 DocumentationBartos GáborAinda não há avaliações
- Segmentation and Extraction FeatureDocumento7 páginasSegmentation and Extraction FeatureMitchAinda não há avaliações
- Assembly Language GuideDocumento8 páginasAssembly Language GuidePaul Neil Maaghop100% (1)
- White Blood Cell Detection Using Image ProcessingDocumento1 páginaWhite Blood Cell Detection Using Image ProcessingMitchAinda não há avaliações
- LECTURE 1 - Computer SystemDocumento63 páginasLECTURE 1 - Computer SystemMitchAinda não há avaliações
- FB 20 - EstDocumento2 páginasFB 20 - EstLuzPrietoAinda não há avaliações
- Introduction To Microcontrollersd (1) - 2Documento35 páginasIntroduction To Microcontrollersd (1) - 2MitchAinda não há avaliações
- ECE 513 - PART1-Introduction To PIC16F84ADocumento46 páginasECE 513 - PART1-Introduction To PIC16F84AMitch100% (1)
- Vehicle To Vehicle Communication WhitepaperDocumento13 páginasVehicle To Vehicle Communication WhitepaperArunShan100% (1)
- Dib MSINDocumento75 páginasDib MSINMitchAinda não há avaliações
- Servo MotorDocumento1 páginaServo MotorMitchAinda não há avaliações
- Special Topics - Midterm Electronics Part 3Documento2 páginasSpecial Topics - Midterm Electronics Part 3MitchAinda não há avaliações
- Special Topics - ComputersDocumento8 páginasSpecial Topics - ComputersMitchAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Quick setup guide for D-Link ShareCenter DNS-320L cloud storageDocumento5 páginasQuick setup guide for D-Link ShareCenter DNS-320L cloud storageMauricio GlezAinda não há avaliações
- 04 Non-Pilot Protection of Transmission Lines PDFDocumento9 páginas04 Non-Pilot Protection of Transmission Lines PDFAHMED BILAL100% (1)
- Carvin Engineering Data: Receiving InspectionDocumento4 páginasCarvin Engineering Data: Receiving InspectionBetoAinda não há avaliações
- 0000518A Circuit Breaker PaperDocumento5 páginas0000518A Circuit Breaker PaperRicardo HerreraAinda não há avaliações
- Phasor Measurement Units in The Indian Smart Grid: Mohd Rihan Mukhtar Ahmad M. Salim BegDocumento7 páginasPhasor Measurement Units in The Indian Smart Grid: Mohd Rihan Mukhtar Ahmad M. Salim BegDrVikas Singh BhadoriaAinda não há avaliações
- NR Test Block MD1701S CatalogDocumento3 páginasNR Test Block MD1701S CatalogccmbuxAinda não há avaliações
- LM5116Documento37 páginasLM5116Evanier Souza de AlencarAinda não há avaliações
- Uni-Field Interprises Inc.Documento12 páginasUni-Field Interprises Inc.Loui Lester BarciaAinda não há avaliações
- SPWM Full Bridge Transformerless PV Grid Connected InverterDocumento9 páginasSPWM Full Bridge Transformerless PV Grid Connected InverterOdnamra AlvarezAinda não há avaliações
- Em InductionDocumento51 páginasEm InductionAmy DavisAinda não há avaliações
- Content Beyond The SyllabusDocumento3 páginasContent Beyond The SyllabusRamya SamuelAinda não há avaliações
- Polyphase RectifierDocumento4 páginasPolyphase RectifierGlenda Grageda100% (1)
- Intrinity Plus Information FlyerDocumento2 páginasIntrinity Plus Information FlyerMichaelAinda não há avaliações
- Check List For Acdb: Document NoDocumento2 páginasCheck List For Acdb: Document NoJaswant SutharAinda não há avaliações
- IoTES Lab ManualDocumento9 páginasIoTES Lab ManualdevrepankajAinda não há avaliações
- IRS2106/IRS21064 high and low side driver datasheetDocumento25 páginasIRS2106/IRS21064 high and low side driver datasheetmohamedAinda não há avaliações
- Roland TR-505 ROM Expansion Installation Instructions: November 2016Documento3 páginasRoland TR-505 ROM Expansion Installation Instructions: November 2016listentomerijnAinda não há avaliações
- Evolution of ComputerDocumento10 páginasEvolution of ComputerAbhishek DabarAinda não há avaliações
- Mini Project of Paper BatteryDocumento22 páginasMini Project of Paper BatteryvamsiAinda não há avaliações
- HQDS Hybrid Power System Operator ManualDocumento122 páginasHQDS Hybrid Power System Operator ManualTrung LêAinda não há avaliações
- Metaserv 250Documento8 páginasMetaserv 250sigitdyAinda não há avaliações
- Thesis Power Amplifier DesignDocumento8 páginasThesis Power Amplifier Designleslylockwoodpasadena100% (2)
- The General Theory of Alternating Current Machines Application To Practical ProblemsDocumento294 páginasThe General Theory of Alternating Current Machines Application To Practical ProblemsDanang Aji100% (2)
- Up-Crst02 20171030Documento11 páginasUp-Crst02 20171030Munawar AliAinda não há avaliações
- Analytic Solution for Torque Between Magnetic DipolesDocumento5 páginasAnalytic Solution for Torque Between Magnetic DipolesLee Kar Huo22% (9)
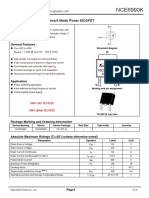
- NCE6990K: NCE N-Channel Enhancement Mode Power MOSFETDocumento7 páginasNCE6990K: NCE N-Channel Enhancement Mode Power MOSFETpepenitoAinda não há avaliações
- WS-100 To WS-235: Arun SeriesDocumento3 páginasWS-100 To WS-235: Arun Seriesajitp123Ainda não há avaliações
- Protection System Fundamentals and ApplicationsDocumento27 páginasProtection System Fundamentals and ApplicationsHEMANT RAMJIAinda não há avaliações
- User Manual R11015 TLDocumento80 páginasUser Manual R11015 TLJean Pierre Carranza CavaniAinda não há avaliações
- Protection Station Installation ManualDocumento44 páginasProtection Station Installation ManualJosip SubaricAinda não há avaliações