Você também pode gostar
- Curso de finanzas: Plan de mejoramiento para aumentar el valor de Autoservicio Don LaureanoDocumento403 páginasCurso de finanzas: Plan de mejoramiento para aumentar el valor de Autoservicio Don LaureanomarocaAinda não há avaliações
- Plan de Mejoramiento.Documento403 páginasPlan de Mejoramiento.marocaAinda não há avaliações
- ASERTIVIDADDocumento4 páginasASERTIVIDADmarocaAinda não há avaliações
- Reglas de ortografía y sintaxis en españolDocumento11 páginasReglas de ortografía y sintaxis en españolmarocaAinda não há avaliações
- Trabajo Final - 100103 - 1025Documento21 páginasTrabajo Final - 100103 - 1025marocaAinda não há avaliações
- Trabajo, Relatoria Del Trabajo Colaborativo.Documento6 páginasTrabajo, Relatoria Del Trabajo Colaborativo.marocaAinda não há avaliações
- Paso 2Documento12 páginasPaso 2dianaAinda não há avaliações
- Tesis de Creacion de Una Empresa de Logistica de EventosDocumento148 páginasTesis de Creacion de Una Empresa de Logistica de EventossanchohenaoAinda não há avaliações
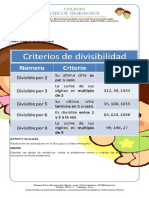
- Criterios de Divisibilidad 402Documento1 páginaCriterios de Divisibilidad 402marocaAinda não há avaliações
- ASERTIVIDADDocumento4 páginasASERTIVIDADmarocaAinda não há avaliações
- Colegio Chicos Ingeniosos exámenes finales segundo periodoDocumento1 páginaColegio Chicos Ingeniosos exámenes finales segundo periodomarocaAinda não há avaliações
- Actividad de Lejislacion: Yaneth TrillosDocumento9 páginasActividad de Lejislacion: Yaneth TrillosmarocaAinda não há avaliações
- Tarea 2Documento2 páginasTarea 2marocaAinda não há avaliações
- Dibujotecnico TornilloDocumento1 páginaDibujotecnico TornillomarocaAinda não há avaliações
- Comercio ElectronicoDocumento10 páginasComercio ElectronicomarocaAinda não há avaliações
- Control Tº HornoDocumento1 páginaControl Tº HornomarocaAinda não há avaliações
- Trabajo Grupal No2 Grupo-100103 222Documento11 páginasTrabajo Grupal No2 Grupo-100103 222marocaAinda não há avaliações
- Extractor de PoleasDocumento4 páginasExtractor de PoleasmarocaAinda não há avaliações
- Ups GT000400 PDFDocumento243 páginasUps GT000400 PDFVillacis LeonardoAinda não há avaliações
- Trabajo ColaborativoDocumento12 páginasTrabajo ColaborativomarocaAinda não há avaliações
- TFM - Beatriz Matos AgudoDocumento152 páginasTFM - Beatriz Matos Agudoelmacuarro5100% (1)
- Protocolo - Modulo Academico 2013-IIDocumento307 páginasProtocolo - Modulo Academico 2013-IIIvonne Elena Meza BonettAinda não há avaliações
- Microelectronics Course MapDocumento2 páginasMicroelectronics Course MapmarocaAinda não há avaliações
- Control AdaptivoDocumento4 páginasControl AdaptivobussinessAinda não há avaliações
- Microelectronics Course MapDocumento2 páginasMicroelectronics Course MapmarocaAinda não há avaliações
- Lecciones BuenasDocumento29 páginasLecciones BuenasAmilcar BurbanoAinda não há avaliações
- Informe Cristian Rozo LópezDocumento7 páginasInforme Cristian Rozo LópezmarocaAinda não há avaliações
- Lecciones BuenasDocumento29 páginasLecciones BuenasAmilcar BurbanoAinda não há avaliações
- Aporte 1 - Jean OrtegaDocumento2 páginasAporte 1 - Jean OrtegamarocaAinda não há avaliações
- Control Tº HornoDocumento1 páginaControl Tº HornomarocaAinda não há avaliações
- Libro Uno El Despertar - My Big ToeDocumento6 páginasLibro Uno El Despertar - My Big ToeHugo Salas100% (1)
- Sifon Invertido TeoriaDocumento20 páginasSifon Invertido TeoriaArgenis Dani Gonzales TamaraAinda não há avaliações
- Esquema de TesisDocumento7 páginasEsquema de TesisFrz Shaconn GarriidooAinda não há avaliações
- INTRODUCCION - A - LA - LITERATURA LATINA (Desde Los Orígenes Hasta Apuleyo) - Jacques - Gaillard. Ed. Acento Editorial PDFDocumento111 páginasINTRODUCCION - A - LA - LITERATURA LATINA (Desde Los Orígenes Hasta Apuleyo) - Jacques - Gaillard. Ed. Acento Editorial PDFmarco vela100% (1)
- Linea de Tiempo: TelemedicinaDocumento5 páginasLinea de Tiempo: TelemedicinaLiz Mrm50% (2)
- Agujeros DuchaDocumento37 páginasAgujeros DuchaDiego CevallosAinda não há avaliações
- FichaNo61064 1Documento3 páginasFichaNo61064 146t456Ainda não há avaliações
- Curso Master Java 450hDocumento10 páginasCurso Master Java 450hneptalgAinda não há avaliações
- Base Datos Proyectos Eia OrdinariaDocumento332 páginasBase Datos Proyectos Eia OrdinariaAngel M. GonzalezAinda não há avaliações
- 1º Unidad MY BEST FRIEND (7º Grade)Documento3 páginas1º Unidad MY BEST FRIEND (7º Grade)camila-gomez0% (1)
- Tipos de ReactivosDocumento83 páginasTipos de ReactivosGrupos Ntic UnisonAinda não há avaliações
- Situación Comunicativa y Procesamiento de FuentesDocumento1 páginaSituación Comunicativa y Procesamiento de FuentesMARK LOPEZ CHUMBEAinda não há avaliações
- Simbología norma ISA S5.1-84 instrumentaciónDocumento20 páginasSimbología norma ISA S5.1-84 instrumentaciónanju139221Ainda não há avaliações
- Memoria Técnica y Diseño de Las Redes Eléctricas de Distribución de La Primera Etapa PDFDocumento2 páginasMemoria Técnica y Diseño de Las Redes Eléctricas de Distribución de La Primera Etapa PDFJorge Enrique TopònAinda não há avaliações
- Informe Semestral Entregado 3 de Junio2011 Por Pres. Junta Gob. Marimar Perez Riera / Metas Corporativas de AEEDocumento16 páginasInforme Semestral Entregado 3 de Junio2011 Por Pres. Junta Gob. Marimar Perez Riera / Metas Corporativas de AEETodo Puerto Rico contra el abuso de la AEEAinda não há avaliações
- Guía Pedagógica ÉticaDocumento3 páginasGuía Pedagógica ÉticaElizabethMorenoBonillaAinda não há avaliações
- 1 PDFDocumento114 páginas1 PDFRaida Uceda GarniqueAinda não há avaliações
- Mínimo Producto Viable PDFDocumento7 páginasMínimo Producto Viable PDFDaniel Leonardo Guzman GonzalesAinda não há avaliações
- 6 - Material de Trabajo - GTH PDFDocumento43 páginas6 - Material de Trabajo - GTH PDFLiana SalasAinda não há avaliações
- Campana lineal CK601IX-A EAN 6948549365614 características filtros ledDocumento1 páginaCampana lineal CK601IX-A EAN 6948549365614 características filtros ledJosse Maykol Mundaca VasquezAinda não há avaliações
- Tesis Catolica Andres BelloDocumento119 páginasTesis Catolica Andres BelloMiguel SalazarAinda não há avaliações
- Auditoria en TelecomunicacionesDocumento19 páginasAuditoria en TelecomunicacionesRita OrtizAinda não há avaliações
- Especificaciones de EscarificadoDocumento3 páginasEspecificaciones de EscarificadoJefry Apaza VillanuevaAinda não há avaliações
- Perdidas de Un Motor de Combustion InternaDocumento9 páginasPerdidas de Un Motor de Combustion InternaSergio QuinteroAinda não há avaliações
- Anexo 1 - Anexo Teìcnico MICROACUEDUCTODocumento53 páginasAnexo 1 - Anexo Teìcnico MICROACUEDUCTOElkinRafaelTovioAinda não há avaliações
- Códigos de Error en Equipos de Audio PanasonicDocumento3 páginasCódigos de Error en Equipos de Audio PanasonicJimmyAinda não há avaliações
- Lamina Galvanizada TerniumDocumento3 páginasLamina Galvanizada TerniumHernan ManuezAinda não há avaliações
- CONFIGURACIÓN DE GRBL V0.9docxDocumento11 páginasCONFIGURACIÓN DE GRBL V0.9docxLuciano Espinosa100% (1)
- Prueba 1 Me FluidosDocumento10 páginasPrueba 1 Me FluidosFrancisco Alejandro Quinteros CarcamoAinda não há avaliações
- Los Convenios Mundiales Sobre El Medio AmbienteDocumento2 páginasLos Convenios Mundiales Sobre El Medio AmbienteKarenBrionesCastilloAinda não há avaliações