Você também pode gostar
- Power Transition Enhancement For Variable-Speed, Variable-Pitch Wind Turbines Using Model Predictive Control TechniquesDocumento7 páginasPower Transition Enhancement For Variable-Speed, Variable-Pitch Wind Turbines Using Model Predictive Control TechniquesKevin Chicaiza PalaciosAinda não há avaliações
- Hydraulic Systems Used For Pitch Control of Wind TDocumento9 páginasHydraulic Systems Used For Pitch Control of Wind TMubtazAinda não há avaliações
- Nonlinear Control of Variable Speed Wind TurbinesDocumento7 páginasNonlinear Control of Variable Speed Wind TurbinesSoumya RanjanAinda não há avaliações
- Nonlinear Systems Analysis and Control of Variable Speed Wind Turbines For Multiregime OperationDocumento10 páginasNonlinear Systems Analysis and Control of Variable Speed Wind Turbines For Multiregime Operationuma.bhuvanAinda não há avaliações
- New, Simple Blade-Pitch Control Mechanism For Small-Size, Horizontal-Axis Wind TurbinesDocumento12 páginasNew, Simple Blade-Pitch Control Mechanism For Small-Size, Horizontal-Axis Wind TurbinesAmlan DasAinda não há avaliações
- Performance Testing of A Small Vertical-Axis Wind Turbine: June 2007Documento3 páginasPerformance Testing of A Small Vertical-Axis Wind Turbine: June 2007Username4653Ainda não há avaliações
- ... Basic Controller Tuning For Large Offshore Wind TurbinesDocumento23 páginas... Basic Controller Tuning For Large Offshore Wind TurbineselginAinda não há avaliações
- ISA Transactions: A. Asgharnia, A. Jamali, R. Shahnazi, A. MaheriDocumento15 páginasISA Transactions: A. Asgharnia, A. Jamali, R. Shahnazi, A. MaheriJuan MataAinda não há avaliações
- Energies: Artificial Neural Network Based Reinforcement Learning For Wind Turbine Yaw ControlDocumento17 páginasEnergies: Artificial Neural Network Based Reinforcement Learning For Wind Turbine Yaw ControlWilliam Jaldin CorralesAinda não há avaliações
- Pitch Angle ControlDocumento6 páginasPitch Angle ControlniraulAinda não há avaliações
- Engineering Science and Technology, An International JournalDocumento9 páginasEngineering Science and Technology, An International JournalmiguelAinda não há avaliações
- Adaptive and Predictive Control Strategies For Wind Turbine Systems A SurveyDocumento15 páginasAdaptive and Predictive Control Strategies For Wind Turbine Systems A Surveymoulya ponnapalliAinda não há avaliações
- Effect Investigation of Yaw On Wind Turbine Performance Based On SCADA DataDocumento13 páginasEffect Investigation of Yaw On Wind Turbine Performance Based On SCADA DataSuci AriyantiAinda não há avaliações
- Wind-Turbine Collective-Pitch Control Via A Fuzzy Predictive AlgorithmDocumento9 páginasWind-Turbine Collective-Pitch Control Via A Fuzzy Predictive AlgorithmSyed Furqan RafiqueAinda não há avaliações
- Yong Li 2016 Neuro Adaptive VS Control Wind EstimationDocumento10 páginasYong Li 2016 Neuro Adaptive VS Control Wind EstimationMauricio OhseAinda não há avaliações
- Machines: A Study of The Impact of Pitch Misalignment On Wind Turbine PerformanceDocumento13 páginasMachines: A Study of The Impact of Pitch Misalignment On Wind Turbine PerformanceMoroko69Ainda não há avaliações
- Design of A Nonlinear Multi-Input-Multi-Output Sliding Mode Pitch Angle and Plunge Controller For A 5MW Wind Turbine Blade TipDocumento16 páginasDesign of A Nonlinear Multi-Input-Multi-Output Sliding Mode Pitch Angle and Plunge Controller For A 5MW Wind Turbine Blade TipDuyên Nguyễn NgọcAinda não há avaliações
- Optimal Control of Variable Speed Wind TurbinesDocumento7 páginasOptimal Control of Variable Speed Wind Turbineschikha saidAinda não há avaliações
- Ijsrp p9598 PublishedDocumento17 páginasIjsrp p9598 PublishedΡπανεεηκυΜαπAinda não há avaliações
- Dynamical Sliding Mode Power Control of Wind Driven Induction GeneratorsDocumento7 páginasDynamical Sliding Mode Power Control of Wind Driven Induction GeneratorsRiad ToufoutiAinda não há avaliações
- 568 1711 3 PBDocumento6 páginas568 1711 3 PBDRISHYAAinda não há avaliações
- LFC With High Penetration of Wind Farms - Robust Fuzzy ControllerDocumento21 páginasLFC With High Penetration of Wind Farms - Robust Fuzzy ControllerAmar IndraAinda não há avaliações
- Implementation of Sliding Mode Control System For Generator and Grid Sides Control of Wind Energy Conversion SystemDocumento18 páginasImplementation of Sliding Mode Control System For Generator and Grid Sides Control of Wind Energy Conversion Systemhamza gaAinda não há avaliações
- 10 MW Wind Turbine Direct-Drive Generato PDFDocumento6 páginas10 MW Wind Turbine Direct-Drive Generato PDFtgd1973Ainda não há avaliações
- Advanced Pitch Angle Control Configuration of Wind Energy Conversion System With Different Control System ConfigurationDocumento5 páginasAdvanced Pitch Angle Control Configuration of Wind Energy Conversion System With Different Control System ConfigurationEditor IJTSRDAinda não há avaliações
- Pitch Angle Control For Variable Speed Wind TurbinesDocumento8 páginasPitch Angle Control For Variable Speed Wind TurbinesDj GameAinda não há avaliações
- Optimal Control of Variable Speed Wind TurbinesDocumento6 páginasOptimal Control of Variable Speed Wind TurbinesStefania OliveiraAinda não há avaliações
- Performance Prediction and Fundamental Understanding of Small ScaleDocumento17 páginasPerformance Prediction and Fundamental Understanding of Small Scaleأحمد إبراهيم شواربAinda não há avaliações
- Design of PI Controller in Pitch Control of Wind Turbine: A Comparison of PSO and PS AlgorithmDocumento11 páginasDesign of PI Controller in Pitch Control of Wind Turbine: A Comparison of PSO and PS Algorithmashikhmd4467Ainda não há avaliações
- Design and Analysis of Vertical Axis Wind Turbine Rotors: MD. Saddam Hussen, Dr. K. Rambabu, M. Ramji, E. SrinivasDocumento9 páginasDesign and Analysis of Vertical Axis Wind Turbine Rotors: MD. Saddam Hussen, Dr. K. Rambabu, M. Ramji, E. SrinivasHaseeb UddinAinda não há avaliações
- Energies 12 02248 PDFDocumento18 páginasEnergies 12 02248 PDFHữu Thịnh ĐỗAinda não há avaliações
- Control Engineering Practice: Michael Erhard, Hans StrauchDocumento14 páginasControl Engineering Practice: Michael Erhard, Hans StrauchSka dooshAinda não há avaliações
- Epsr 2012Documento24 páginasEpsr 2012godspower brunoAinda não há avaliações
- Numerical and Experimental Methods For T PDFDocumento14 páginasNumerical and Experimental Methods For T PDFmersad uzunovicAinda não há avaliações
- 06! - Remotesensing 10 00668Documento18 páginas06! - Remotesensing 10 00668Rafa Otero EscuderoAinda não há avaliações
- Wind Power Forecasting Literature ReviewDocumento6 páginasWind Power Forecasting Literature Reviewckkuzaxgf100% (1)
- Formulas of The Optimized Yaw Angles For Cooperative Control of Wind Farms With Aligned Turbines To Maximize The Power ProductionDocumento13 páginasFormulas of The Optimized Yaw Angles For Cooperative Control of Wind Farms With Aligned Turbines To Maximize The Power ProductionKurniawan CorpAinda não há avaliações
- Computational Flow Field Analysis of A Vertical Axis Wind TurbineDocumento6 páginasComputational Flow Field Analysis of A Vertical Axis Wind TurbineAnonymous ITnkbIEFAinda não há avaliações
- Research Article: Design of A PID Controller For A Linearized Magnetic BearingDocumento13 páginasResearch Article: Design of A PID Controller For A Linearized Magnetic BearingsnowleoAinda não há avaliações
- Electrical Power and Energy Systems: Chih-Ming Hong, Chiung-Hsing ChenDocumento8 páginasElectrical Power and Energy Systems: Chih-Ming Hong, Chiung-Hsing ChenVinod KohliAinda não há avaliações
- Analysis of The Furling Behavior of Small Wind Turbines 2010 Applied EnergyDocumento15 páginasAnalysis of The Furling Behavior of Small Wind Turbines 2010 Applied EnergygeoAinda não há avaliações
- Energies 15 06700 v3Documento36 páginasEnergies 15 06700 v3Peng LiAinda não há avaliações
- Performance Analysis of Skyhook, Groundhook and Hybrid Control Strategies On Semiactive Suspension System - Paper56265-269Documento5 páginasPerformance Analysis of Skyhook, Groundhook and Hybrid Control Strategies On Semiactive Suspension System - Paper56265-269Nguyen QuocAinda não há avaliações
- Fuzzy Logic Principles For Wind Speed Estimation in Wind Energy Conversion SystemsDocumento5 páginasFuzzy Logic Principles For Wind Speed Estimation in Wind Energy Conversion SystemsMillnia Fatiha Rizka AsitaAinda não há avaliações
- Power Optimization and Control in Wind Energy Conversion Systems Using Extremum SeekingDocumento12 páginasPower Optimization and Control in Wind Energy Conversion Systems Using Extremum SeekingVijay RajuAinda não há avaliações
- MPPT - Wind Power 11020623122124957Documento8 páginasMPPT - Wind Power 11020623122124957tran duyAinda não há avaliações
- Design of A Wind Turbine Pitch Controller For Loads and Fatigue ReductionDocumento10 páginasDesign of A Wind Turbine Pitch Controller For Loads and Fatigue ReductionperkusicmAinda não há avaliações
- Ijme V7i11p103Documento9 páginasIjme V7i11p103abdulmalikmusa11242Ainda não há avaliações
- Bob Row 1998Documento11 páginasBob Row 1998Leonel Bejar VelardeAinda não há avaliações
- Supervisory Control of A Wind Farm: Zbigniew Lubosny, Member, IEEE, and Janusz W. Bialek, Member, IEEEDocumento10 páginasSupervisory Control of A Wind Farm: Zbigniew Lubosny, Member, IEEE, and Janusz W. Bialek, Member, IEEETaufikHidayatAinda não há avaliações
- Advanced Control Algorithms For Reduction of Wind Turbine 2015 Renewable enDocumento14 páginasAdvanced Control Algorithms For Reduction of Wind Turbine 2015 Renewable enclaralisieAinda não há avaliações
- Horizontal Axis Wind Turbines Passive Flow Control Methods: A ReviewDocumento18 páginasHorizontal Axis Wind Turbines Passive Flow Control Methods: A ReviewHavaldar, SanjayAinda não há avaliações
- Literature Review On Vertical Axis Wind TurbineDocumento4 páginasLiterature Review On Vertical Axis Wind Turbineaflsodoam100% (1)
- Measurement-Based Performance Analysis of Wind Energy SystemsDocumento6 páginasMeasurement-Based Performance Analysis of Wind Energy SystemsSamundra GurungAinda não há avaliações
- Menezes 2017Documento26 páginasMenezes 2017Mauricio OhseAinda não há avaliações
- Literature Review Paper On Doubly Fed Induction Generator Wind Turbine TechnologyDocumento8 páginasLiterature Review Paper On Doubly Fed Induction Generator Wind Turbine Technologyrao saniAinda não há avaliações
- (Ajay Singh) Review On Control Techniques For VSWT NewDocumento6 páginas(Ajay Singh) Review On Control Techniques For VSWT NewAjay SinghAinda não há avaliações
- Offshore Wind Turbine ReportDocumento19 páginasOffshore Wind Turbine ReportKevin OnyangoAinda não há avaliações
- Overcurrent Relay Advances for Modern Electricity NetworksNo EverandOvercurrent Relay Advances for Modern Electricity NetworksAinda não há avaliações
- Grid Connected Converters: Modeling, Stability and ControlNo EverandGrid Connected Converters: Modeling, Stability and ControlAinda não há avaliações
- Devolatilization Characteristics of Large Particles of Tyre Rubber Under Combustion Conditions PDFDocumento11 páginasDevolatilization Characteristics of Large Particles of Tyre Rubber Under Combustion Conditions PDFclaralisieAinda não há avaliações
- H SO Catalysis: Perspective & Opportunities For Reducing SO EmissionsDocumento16 páginasH SO Catalysis: Perspective & Opportunities For Reducing SO EmissionsclaralisieAinda não há avaliações
- Experimental Flow Field Characteristics of OFA For Large-Angle Counter Flow of Fuel-Rich Jet Combustion TechnologyDocumento9 páginasExperimental Flow Field Characteristics of OFA For Large-Angle Counter Flow of Fuel-Rich Jet Combustion TechnologyclaralisieAinda não há avaliações
- How To Do Structural and Thermal Analysis of Disc Brake Rotor Using Ansys Software - GrabCAD TutorialsDocumento1 páginaHow To Do Structural and Thermal Analysis of Disc Brake Rotor Using Ansys Software - GrabCAD TutorialsclaralisieAinda não há avaliações
- Review of Aeroelasticity For Wind Turbine Current Status, Research Focus and Future PerspectivesDocumento16 páginasReview of Aeroelasticity For Wind Turbine Current Status, Research Focus and Future PerspectivesclaralisieAinda não há avaliações
- A Cost and Performance Comparison of LRTM and VI For The Manu 2011 RenewableDocumento6 páginasA Cost and Performance Comparison of LRTM and VI For The Manu 2011 RenewableclaralisieAinda não há avaliações
- NACA Airfoil Optimization: Created in COMSOL Multiphysics 5.3aDocumento5 páginasNACA Airfoil Optimization: Created in COMSOL Multiphysics 5.3aclaralisieAinda não há avaliações
- Study of A Full Scale Oxy-Fuel Cement Rotary Kiln PDFDocumento10 páginasStudy of A Full Scale Oxy-Fuel Cement Rotary Kiln PDFclaralisieAinda não há avaliações
- Advanced Control Algorithms For Reduction of Wind Turbine 2015 Renewable enDocumento14 páginasAdvanced Control Algorithms For Reduction of Wind Turbine 2015 Renewable enclaralisieAinda não há avaliações
- A Boundary Integral Equation Over The Thin Ro 2016 Engineering Analysis WithDocumento7 páginasA Boundary Integral Equation Over The Thin Ro 2016 Engineering Analysis WithclaralisieAinda não há avaliações
- A CFD Analysis of The Operating Conditions of A Multitube PD Membrane Prification H2Documento1 páginaA CFD Analysis of The Operating Conditions of A Multitube PD Membrane Prification H2claralisieAinda não há avaliações
- Effect of Ethanol-Gasoline Blends On Engine Performance PDFDocumento7 páginasEffect of Ethanol-Gasoline Blends On Engine Performance PDFclaralisieAinda não há avaliações
- Energy Policy: Jing Geng, Yonglong Lu, Tieyu Wang, John P. Giesy, Chunli ChenDocumento11 páginasEnergy Policy: Jing Geng, Yonglong Lu, Tieyu Wang, John P. Giesy, Chunli ChenclaralisieAinda não há avaliações
- Lube Oil Consumption Simulation Validation and Parametric InvestigationDocumento11 páginasLube Oil Consumption Simulation Validation and Parametric InvestigationclaralisieAinda não há avaliações
- Modelagem em CFDDocumento7 páginasModelagem em CFDclaralisieAinda não há avaliações
- 2ND Week Law of AccelerationDocumento5 páginas2ND Week Law of AccelerationMira VeranoAinda não há avaliações
- 2 M2-Prinsip Dan Penerapan Diagram FasaDocumento62 páginas2 M2-Prinsip Dan Penerapan Diagram FasaAhmad WildanAinda não há avaliações
- Finite Element Analysis of Structures: M A M N e FDocumento25 páginasFinite Element Analysis of Structures: M A M N e FhoneybAinda não há avaliações
- Creep Properties PDFDocumento23 páginasCreep Properties PDFMehmet Soysal100% (1)
- DGGDocumento1 páginaDGGKen RamosAinda não há avaliações
- DB Noise Level TerminologyDocumento12 páginasDB Noise Level TerminologyArif MehmoodAinda não há avaliações
- Abaqus UnitsDocumento8 páginasAbaqus UnitsAnonymous UoHUagAinda não há avaliações
- Newton's Mathematical Explanations About Gravitation Galileo's Experiment On GravitationsDocumento1 páginaNewton's Mathematical Explanations About Gravitation Galileo's Experiment On GravitationsKrishaAinda não há avaliações
- Lab 4 Mass-Spring System - v3Documento13 páginasLab 4 Mass-Spring System - v3sairafiAinda não há avaliações
- Poster ChromatographyDocumento1 páginaPoster ChromatographySava VijakAinda não há avaliações
- Assgn AnswersDocumento5 páginasAssgn AnswersmtzimunyaAinda não há avaliações
- Phy110 Chapter 2 StudentDocumento38 páginasPhy110 Chapter 2 StudentSOFIAH NAJWA BINTI SHAMSUDDINAinda não há avaliações
- Self Weight CalculationDocumento16 páginasSelf Weight Calculationsabareesan09Ainda não há avaliações
- Is12778 2004Documento16 páginasIs12778 2004ershekarAinda não há avaliações
- Me139 E1 ArroyoDocumento13 páginasMe139 E1 ArroyojamesAinda não há avaliações
- 101 Nozzle SlabDocumento10 páginas101 Nozzle SlabkarthiAinda não há avaliações
- What Is Difference Between Upper and Lower Yield PointDocumento4 páginasWhat Is Difference Between Upper and Lower Yield PointكنوزخطابAinda não há avaliações
- R3.105 Final Report UpdatedDocumento77 páginasR3.105 Final Report UpdatedSamAinda não há avaliações
- 3.7.2.4 Orbits of Planets and SatellitesDocumento55 páginas3.7.2.4 Orbits of Planets and SatellitesRutba SafdarAinda não há avaliações
- Cambridge International AS & A Level: PHYSICS 9702/21Documento16 páginasCambridge International AS & A Level: PHYSICS 9702/21aliexpress0230170Ainda não há avaliações
- Wood Element Axial Bending EC5Documento2 páginasWood Element Axial Bending EC5nicolaemariusAinda não há avaliações
- PEMF Buyers Guide 2015 - Bryant MeyersDocumento38 páginasPEMF Buyers Guide 2015 - Bryant MeyersVas RaAinda não há avaliações
- Chapter 3 - Francis and Kaplan Turbine - Fluid MachineryDocumento26 páginasChapter 3 - Francis and Kaplan Turbine - Fluid Machineryamanpreet2190100% (6)
- Elicit: Distinguish Mechanical and Electromagnetic WavesDocumento3 páginasElicit: Distinguish Mechanical and Electromagnetic WavesJasmin Japzon SeballosAinda não há avaliações
- Chapter 03 The Second Law - HomeworkDocumento2 páginasChapter 03 The Second Law - HomeworkrottymarsellaAinda não há avaliações
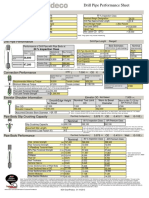
- Drill Pipe Performance Sheet 5.875 XT57 G105Documento3 páginasDrill Pipe Performance Sheet 5.875 XT57 G105Garcia C L AlbertoAinda não há avaliações
- BEAMCOL9Documento10 páginasBEAMCOL9Richard FallegaAinda não há avaliações
- Design & Application of FeederDocumento39 páginasDesign & Application of Feedermaran.suguAinda não há avaliações