Você também pode gostar
- Normas de segurança e primeiros socorros em laboratórioDocumento21 páginasNormas de segurança e primeiros socorros em laboratórioRonaldo BortolanzaAinda não há avaliações
- Exercícios Mat BásicaDocumento2 páginasExercícios Mat BásicaRonaldo BortolanzaAinda não há avaliações
- Exercícios Ensino FundamentalDocumento3 páginasExercícios Ensino FundamentalRonaldo BortolanzaAinda não há avaliações
- Instrução de Envio de Equipamento TECNALDocumento1 páginaInstrução de Envio de Equipamento TECNALRonaldo BortolanzaAinda não há avaliações
- .Planejamento de CarreiraDocumento66 páginas.Planejamento de Carreira10680Ainda não há avaliações
- Metodologia Da Pesquisa Científica AsDocumento85 páginasMetodologia Da Pesquisa Científica AsRonaldo BortolanzaAinda não há avaliações
- TE-0364 - 127V Rev.06Documento17 páginasTE-0364 - 127V Rev.06Ronaldo Bortolanza100% (1)
- ApostilaPQO PDFDocumento476 páginasApostilaPQO PDFRafael Santos0% (1)
- Protocolo - Nitrogênio-ProteínaDocumento3 páginasProtocolo - Nitrogênio-ProteínaRonaldo BortolanzaAinda não há avaliações
- .Planejamento de CarreiraDocumento66 páginas.Planejamento de Carreira10680Ainda não há avaliações
- Relações Humanas e Ética ProfissionalDocumento54 páginasRelações Humanas e Ética Profissional10680Ainda não há avaliações
- Metodologia Da Educação À DistânciaDocumento60 páginasMetodologia Da Educação À DistânciaRonaldo BortolanzaAinda não há avaliações
- Trabalho SDocumento12 páginasTrabalho SRonaldo BortolanzaAinda não há avaliações
- Perícia Contábil: Fundamentos e Visão GeralDocumento92 páginasPerícia Contábil: Fundamentos e Visão GeralRonaldo BortolanzaAinda não há avaliações
- Teoria Geral Da AdministraçãoDocumento157 páginasTeoria Geral Da AdministraçãoRonaldo BortolanzaAinda não há avaliações
- Apostila Curso Transcal Parte 8Documento25 páginasApostila Curso Transcal Parte 8Ronaldo BortolanzaAinda não há avaliações
- 1361 2741 1 SM PDFDocumento7 páginas1361 2741 1 SM PDFRonaldo BortolanzaAinda não há avaliações
- 2 LeiDocumento4 páginas2 LeiRonaldo BortolanzaAinda não há avaliações
- Soldagem Por ExplosãoDocumento6 páginasSoldagem Por ExplosãoRonaldo BortolanzaAinda não há avaliações
- APR - Montagem Desmontagem e Trabalho A Quente PDFDocumento4 páginasAPR - Montagem Desmontagem e Trabalho A Quente PDFFabio Rodrigo100% (1)
- Apresentação Aplicação Do Modelo BIM Nos Indicadores de Geração de Resíduos Da Construção CivilDocumento21 páginasApresentação Aplicação Do Modelo BIM Nos Indicadores de Geração de Resíduos Da Construção CivilWaldiana SousaAinda não há avaliações
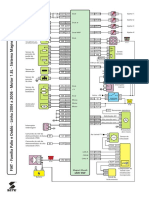
- Esquema Fiat Palio Doblo 2004 A 2006 Motor 1 8Documento2 páginasEsquema Fiat Palio Doblo 2004 A 2006 Motor 1 8Douglas M. Gehlen100% (8)
- Caixas de Padrão de Energia ElektroDocumento89 páginasCaixas de Padrão de Energia ElektroJunior MirandaAinda não há avaliações
- 73 pontes e viadutos de SP com problemasDocumento6 páginas73 pontes e viadutos de SP com problemasSidney Soares OliveiraAinda não há avaliações
- 1700 Questões - Parte 1Documento593 páginas1700 Questões - Parte 1Adriano De Oliveira Silva75% (8)
- Check-List ET Motores Diesel RQ 28 07 Rev 12Documento2 páginasCheck-List ET Motores Diesel RQ 28 07 Rev 12Cicero Souza100% (8)
- Curso Técnicas de SoldaDocumento35 páginasCurso Técnicas de SoldawillwandAinda não há avaliações
- Projeto de mezanino em estruturas metálicasDocumento32 páginasProjeto de mezanino em estruturas metálicasAnonymous JJbrn9zebAinda não há avaliações
- Diagnósticos e correções de freios hidráulicosDocumento26 páginasDiagnósticos e correções de freios hidráulicosCledir BoeckAinda não há avaliações
- Manual do usuário de equipamento de solda MIG/MAGDocumento40 páginasManual do usuário de equipamento de solda MIG/MAGbismael92Ainda não há avaliações
- Bomba D'Água Shurflo 8000 24v Com Painel Solar 24v 40wDocumento8 páginasBomba D'Água Shurflo 8000 24v Com Painel Solar 24v 40wTeixeira Mendes WendelAinda não há avaliações
- Mitsubishi Inverter PDFDocumento4 páginasMitsubishi Inverter PDFrudney1980Ainda não há avaliações
- Processos de UsinagemDocumento85 páginasProcessos de Usinagemwellington848100% (6)
- Catalogo Toshiba 2015 - Print PrintDocumento205 páginasCatalogo Toshiba 2015 - Print PrintAlesse de OliveiraAinda não há avaliações
- Ground SchoolDocumento81 páginasGround SchoolRoberton AlanoAinda não há avaliações
- Elementos MaquinasDocumento3 páginasElementos MaquinasSandramo Alexandre GumbaeraAinda não há avaliações
- Noack 921Documento82 páginasNoack 921AmandaAinda não há avaliações
- Mercedes-Benz Diesel Motor TécnicasDocumento4 páginasMercedes-Benz Diesel Motor TécnicasEngenharia Mecânica T5Ainda não há avaliações
- VW 370Documento45 páginasVW 370luiz100% (4)
- Cli Picinguaba CONEXLEDDocumento4 páginasCli Picinguaba CONEXLEDgianmantAinda não há avaliações
- Elektra Light Electrofusion Machine ManualDocumento31 páginasElektra Light Electrofusion Machine ManualPetarAinda não há avaliações
- Engenharia Elétrica UFESDocumento21 páginasEngenharia Elétrica UFESGiuliano RebuliAinda não há avaliações
- Lista de Serviços de AssentamentoDocumento74 páginasLista de Serviços de AssentamentoGabriel CrincoliAinda não há avaliações
- Cap44 - Sistemas de ImpermeabilizaçãoDocumento116 páginasCap44 - Sistemas de ImpermeabilizaçãoKimberley HollandAinda não há avaliações
- Gerenciamento resíduos oficina mecânicaDocumento10 páginasGerenciamento resíduos oficina mecânicamarcibareaAinda não há avaliações
- Boas Práticas para o Gerente de Projetos de ObrasDocumento11 páginasBoas Práticas para o Gerente de Projetos de Obrasfelipedeng100% (1)
- Tanques industriais, dutos e sistemas de climatizaçãoDocumento2 páginasTanques industriais, dutos e sistemas de climatizaçãojtermixAinda não há avaliações
- Rima - Estudo de Tempos e Movimentos - A Simplificação Do TrabalhoDocumento18 páginasRima - Estudo de Tempos e Movimentos - A Simplificação Do TrabalhoSandro Cantidio100% (3)
- NTE-026-Montagem de Redes de Distribuição Aéreas Urbanas Trifásicas - 13,8 KV e 34,5 KVDocumento84 páginasNTE-026-Montagem de Redes de Distribuição Aéreas Urbanas Trifásicas - 13,8 KV e 34,5 KVRogério Fiscina100% (2)