Você também pode gostar
- Universidad Peruana Los Andes: Facultad de Ingenieria Escuela Profesional de Sistemas Y ComputacionDocumento16 páginasUniversidad Peruana Los Andes: Facultad de Ingenieria Escuela Profesional de Sistemas Y ComputacionAndree Tello PonceAinda não há avaliações
- CONTROLDocumento7 páginasCONTROLAndree Tello PonceAinda não há avaliações
- Luz de Mis OjosDocumento1 páginaLuz de Mis OjosAndree Tello PonceAinda não há avaliações
- Bases de Pre Incubación 2020Documento7 páginasBases de Pre Incubación 2020Andree Tello PonceAinda não há avaliações
- Silabos 2Documento4 páginasSilabos 2Andree Tello PonceAinda não há avaliações
- TASKMGRDocumento7 páginasTASKMGRAndree Tello PonceAinda não há avaliações
- TASKMGRDocumento7 páginasTASKMGRAndree Tello PonceAinda não há avaliações
- Formato EDUCADocumento1 páginaFormato EDUCAAndree Tello PonceAinda não há avaliações
- Técnicas de EstudioDocumento2 páginasTécnicas de EstudioAndree Tello PonceAinda não há avaliações
- ActaDocumento4 páginasActaAndree Tello PonceAinda não há avaliações
- Biologia (Vida)Documento6 páginasBiologia (Vida)Andree Tello PonceAinda não há avaliações
- Mercados Perfectos e ImperfectosDocumento6 páginasMercados Perfectos e ImperfectosAndree Tello PonceAinda não há avaliações
- Computadoras UPCIDocumento5 páginasComputadoras UPCIAndree Tello PonceAinda não há avaliações
- PEC Voluntaria 2022-2023Documento20 páginasPEC Voluntaria 2022-2023Sara Duran CerviñoAinda não há avaliações
- Velocidad Media Del Flujo y Número de ReynoldsDocumento1 páginaVelocidad Media Del Flujo y Número de Reynoldscggfacu6499Ainda não há avaliações
- Trabajo de Investigación Metfísica I 1° Unidad-1Documento11 páginasTrabajo de Investigación Metfísica I 1° Unidad-1Isai Keoma Chirinos DiazAinda não há avaliações
- Revista de Ingeniería Industrial V2 N5 3Documento9 páginasRevista de Ingeniería Industrial V2 N5 3Evelyn CastilloAinda não há avaliações
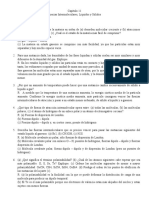
- Capítulo 11, Fuerzas Intermoleculares, Líquidos y Sólidos, Practica Resuelta.Documento9 páginasCapítulo 11, Fuerzas Intermoleculares, Líquidos y Sólidos, Practica Resuelta.Luis Jose Serracin0% (1)
- Practica de Laboratorio Con Kit de MicroondasDocumento4 páginasPractica de Laboratorio Con Kit de MicroondasJose JaimesAinda não há avaliações
- Diseño de Reactor para La Producción de EstirenoDocumento14 páginasDiseño de Reactor para La Producción de EstirenoCarlos RamírezAinda não há avaliações
- Metodo de Ensayo Normalizado Terrones de Arcilla y Particulas Desmenuzables en Los AgregadosDocumento4 páginasMetodo de Ensayo Normalizado Terrones de Arcilla y Particulas Desmenuzables en Los AgregadosJOSE LUNAAinda não há avaliações
- NCP 315 - Septiembre Octubre 2010Documento25 páginasNCP 315 - Septiembre Octubre 2010JuanGuillermoCarmonaOcampoAinda não há avaliações
- TEMA 1 - ENLACES - QUIMICOS - PPTDocumento46 páginasTEMA 1 - ENLACES - QUIMICOS - PPTBRIYITH ESTEFANY LOAIZA HUAMANAinda não há avaliações
- CCNN SEMANA DOS 10moDocumento3 páginasCCNN SEMANA DOS 10moPABLO PACHECOAinda não há avaliações
- Practica Numero 1 ElectromagentismoDocumento3 páginasPractica Numero 1 Electromagentismomanzanaresjuanjesus.23082003Ainda não há avaliações
- FJ 251Documento34 páginasFJ 251Luis Del Campo DiazAinda não há avaliações
- Sustancia CorrosivaDocumento4 páginasSustancia CorrosivaConColAinda não há avaliações
- GYPSUM - Ficha+TécnicaDocumento4 páginasGYPSUM - Ficha+Técnicarodolfoordiguez_70Ainda não há avaliações
- Fisico LLDocumento8 páginasFisico LLItzel Flores OrtizAinda não há avaliações
- 12.impacto Ambiental de Los Combustibles FósilesDocumento2 páginas12.impacto Ambiental de Los Combustibles FósilesMaria DiazAinda não há avaliações
- 3 EnzimasDocumento63 páginas3 EnzimasKamila MartinezAinda não há avaliações
- HidrostaticaDocumento5 páginasHidrostaticaMelanie Bardales SilvaAinda não há avaliações
- Nutrición Autótrofa y HeterótrofaDocumento4 páginasNutrición Autótrofa y HeterótrofaOsmar AlvarezAinda não há avaliações
- HDS SikaForm® MaderaDocumento11 páginasHDS SikaForm® MaderaJorge Sebastián BustosAinda não há avaliações
- Conservación de La Cantidad de MovimientoDocumento4 páginasConservación de La Cantidad de MovimientoJared HernandezAinda não há avaliações
- Duracion o Vida Util Cojinete SKFDocumento21 páginasDuracion o Vida Util Cojinete SKFCésar Emilio Arza PatiñoAinda não há avaliações
- CHERNOBILDocumento35 páginasCHERNOBILDoge :3Ainda não há avaliações
- Teoria CineticaDocumento54 páginasTeoria CineticaVioleta EscalanteAinda não há avaliações
- La Teoria Del Todo Todo PDFDocumento21 páginasLa Teoria Del Todo Todo PDFLORENZOAinda não há avaliações
- Analisis Dimensional IIDocumento5 páginasAnalisis Dimensional IIWilberth LevitaAinda não há avaliações
- Nom 037 Semarnat 1993Documento16 páginasNom 037 Semarnat 1993MatyLde1Ainda não há avaliações
- Propiedades de La MateriaDocumento2 páginasPropiedades de La MateriaJosé Francisco AcostaAinda não há avaliações
- Prospeccion GeofisicaDocumento54 páginasProspeccion GeofisicaKarolainne Chamorro AngelesAinda não há avaliações