Você também pode gostar
- Fasfafafasfasf SF Asfs Afasf Asf Asfasfasfasfaf Af Sfaf AsfafafafasfDocumento2 páginasFasfafafasfasf SF Asfs Afasf Asf Asfasfasfasfaf Af Sfaf AsfafafafasfAlexander Ascencio BalladaresAinda não há avaliações
- FSFGDSGSG Sgsdgsgs SDG SGSG SDocumento1 páginaFSFGDSGSG Sgsdgsgs SDG SGSG SAlexander Ascencio BalladaresAinda não há avaliações
- Enedis 2012 - CompletoDocumento588 páginasEnedis 2012 - CompletoLuis Espinoza AramburúAinda não há avaliações
- Repsolpampillaparada 160712151503Documento62 páginasRepsolpampillaparada 160712151503Alexander Ascencio BalladaresAinda não há avaliações
- Cpi2016 PDFDocumento10 páginasCpi2016 PDFJavier IsidroAinda não há avaliações
- Circuitos HidráulicosDocumento15 páginasCircuitos HidráulicosEduart ST ImlAinda não há avaliações
- SDFSDFSFSDFSDFSDFDocumento22 páginasSDFSDFSFSDFSDFSDFAlexander Ascencio BalladaresAinda não há avaliações
- DSFSFSFSFSFSDFDocumento26 páginasDSFSFSFSFSFSDFAlexander Ascencio BalladaresAinda não há avaliações
- Manual de Fluid SimDocumento29 páginasManual de Fluid SimCesar Ali Olivas RoldanAinda não há avaliações
- Repsolpampillaparada 160712151503Documento62 páginasRepsolpampillaparada 160712151503Alexander Ascencio BalladaresAinda não há avaliações
- AdasdasdasdDocumento28 páginasAdasdasdasdAlexander Ascencio BalladaresAinda não há avaliações
- WfsdfsdfsDocumento37 páginasWfsdfsdfsAlexander Ascencio BalladaresAinda não há avaliações
- Ejemplos neumática cilindroDocumento4 páginasEjemplos neumática cilindroGol300Ainda não há avaliações
- ErwwrwrwrwDocumento7 páginasErwwrwrwrwAlexander Ascencio BalladaresAinda não há avaliações
- SFSDFDocumento5 páginasSFSDFAlexander Ascencio BalladaresAinda não há avaliações
- WfsdfsdfsDocumento37 páginasWfsdfsdfsAlexander Ascencio BalladaresAinda não há avaliações
- DydydydyDocumento7 páginasDydydydyAlexander Ascencio BalladaresAinda não há avaliações
- FsfsdfsfsDocumento12 páginasFsfsdfsfsAlexander Ascencio BalladaresAinda não há avaliações
- ErwwrwrwrwDocumento7 páginasErwwrwrwrwAlexander Ascencio BalladaresAinda não há avaliações
- DFDFDFDocumento8 páginasDFDFDFAlexander Ascencio BalladaresAinda não há avaliações
- DFDFDFDocumento8 páginasDFDFDFAlexander Ascencio BalladaresAinda não há avaliações
- Arduino LED ParpadeoDocumento43 páginasArduino LED ParpadeoIgnacio Daniel Tomasov Silva100% (1)
- PracticasElectronicaIndustrial PDFDocumento28 páginasPracticasElectronicaIndustrial PDFHector GonAinda não há avaliações
- Yyyyyyyyyyyf VBVGVXDXXXDocumento1 páginaYyyyyyyyyyyf VBVGVXDXXXAlexander Ascencio BalladaresAinda não há avaliações
- Edp de Segundo Orden Formas CanonicasDocumento0 páginaEdp de Segundo Orden Formas CanonicasPaulo AzañeroAinda não há avaliações
- Ecuaciones diferenciales resueltasDocumento265 páginasEcuaciones diferenciales resueltasJ Deep AguirreAinda não há avaliações
- EDP CabadaDocumento88 páginasEDP CabadaMatemáticas BetanzosAinda não há avaliações
- SDSDDDDSDFDocumento3 páginasSDSDDDDSDFAlexander Ascencio BalladaresAinda não há avaliações
- DGSSFB VvsesfsDocumento8 páginasDGSSFB VvsesfsAlexander Ascencio BalladaresAinda não há avaliações
- Abolición de La Esclavitud en ColombiaDocumento2 páginasAbolición de La Esclavitud en ColombiaValeria MahechaAinda não há avaliações
- Fol Ejemplo NominaDocumento7 páginasFol Ejemplo NominaJhoan EstebanAinda não há avaliações
- Profesiograma Tecpetrol Rev 2Documento5 páginasProfesiograma Tecpetrol Rev 2capa correoAinda não há avaliações
- Superintendencia educaciónDocumento5 páginasSuperintendencia educaciónVictor RequenaAinda não há avaliações
- Trigonometricas PreparatoriaDocumento18 páginasTrigonometricas PreparatoriaEmmanuel MedelAinda não há avaliações
- Cable óptico de guada OPGW 36 fibrasDocumento2 páginasCable óptico de guada OPGW 36 fibrasHombre de AceroAinda não há avaliações
- Manipulación de Datos en RDocumento47 páginasManipulación de Datos en ROscar Javier Ojeda GomezAinda não há avaliações
- Actividad Mapa MentalDocumento1 páginaActividad Mapa MentalLeonardo benitez morenoAinda não há avaliações
- Las 5 Funciones de Promoción de La SaludDocumento3 páginasLas 5 Funciones de Promoción de La SaludWilanderson Correa50% (6)
- Práctica VI. Neumática, ValvulasDocumento18 páginasPráctica VI. Neumática, Valvulashacov gomezAinda não há avaliações
- Resumen Ejecutivo Oficial - Restaurante Natural GourmetDocumento2 páginasResumen Ejecutivo Oficial - Restaurante Natural GourmetGiovanny GualteroAinda não há avaliações
- Esferificaciones de Patata - WWW - CocinistaDocumento3 páginasEsferificaciones de Patata - WWW - CocinistaFrancisco Pestana100% (1)
- Lapiz de GrafitoDocumento20 páginasLapiz de GrafitoalbertAinda não há avaliações
- Memoria DescriptivaDocumento64 páginasMemoria DescriptivaanurquiroAinda não há avaliações
- APLICACIÓN DEL MÉTODO COSHH Essentials - CASO PRÁCTICODocumento4 páginasAPLICACIÓN DEL MÉTODO COSHH Essentials - CASO PRÁCTICOCarlos DíazAinda não há avaliações
- Syllabus Macro 1Documento3 páginasSyllabus Macro 1Rossana VivianaAinda não há avaliações
- CHECK List Montacargas BlaCo SolutionsDocumento3 páginasCHECK List Montacargas BlaCo SolutionsDaniel BarbaAinda não há avaliações
- Documento ImssDocumento1 páginaDocumento ImssBrandon alfonso HernandezAinda não há avaliações
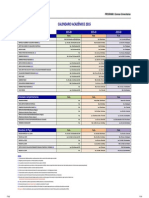
- Calendario académico carreras universitarias 2015Documento1 páginaCalendario académico carreras universitarias 2015Yamir Aedo De la TorreAinda não há avaliações
- Análisis de costos fijos y variables de un productoDocumento3 páginasAnálisis de costos fijos y variables de un productoJavier Alonso Ruiz DimasAinda não há avaliações
- Taller 5Documento14 páginasTaller 5JUAN DAVID MONTES MARTINEZAinda não há avaliações
- Caso Práctico 03Documento18 páginasCaso Práctico 03Juan PerezAinda não há avaliações
- CMT 2 PDFDocumento22 páginasCMT 2 PDFyansy valderramaAinda não há avaliações
- Manual de Convivencia AL PARQUE 2022Documento35 páginasManual de Convivencia AL PARQUE 2022JUAN DIEGO OSPINA YEPES100% (1)
- Cultivos Transgénicos y Su Efecto en La BiodiversidadDocumento2 páginasCultivos Transgénicos y Su Efecto en La BiodiversidadAnahi LunaAinda não há avaliações
- Control de Constitucionalidad y Control de ConvencionalidadDocumento11 páginasControl de Constitucionalidad y Control de ConvencionalidadJuan Pablo Socarras PoloAinda não há avaliações
- s7847-6 ServidoresDocumento3 páginass7847-6 ServidoresYeison EscaleraAinda não há avaliações
- Pentoxido de VanadioDocumento8 páginasPentoxido de VanadioSofia ValenciaAinda não há avaliações
- Proyecto de Innovación Implementando Nuestra Aula de Innovación PedagógigaDocumento4 páginasProyecto de Innovación Implementando Nuestra Aula de Innovación PedagógigaMILAGROS F.Ainda não há avaliações
- Trabajo FinalDocumento10 páginasTrabajo FinalJULIAN DAVID MARTIN HERNANDEZAinda não há avaliações