Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Chapter #4 Bending Stress: Simple Bending Theory Area of Second Moment Parallel Axes Theorem Deflection of Composite BeamDocumento30 páginasChapter #4 Bending Stress: Simple Bending Theory Area of Second Moment Parallel Axes Theorem Deflection of Composite Beamlayiro2Ainda não há avaliações
- Mechanical Principles H2 Tutorial 4 Self Assessment Exercise No.1Documento6 páginasMechanical Principles H2 Tutorial 4 Self Assessment Exercise No.1layiro2Ainda não há avaliações
- Analisis de Mecanica de SolidosDocumento8 páginasAnalisis de Mecanica de Solidoslayiro2Ainda não há avaliações
- Modelling and Simulation of Multi Spindle Drilling Redundant Scara Robot Using Solidworks and Matlab/SimmechanicsDocumento10 páginasModelling and Simulation of Multi Spindle Drilling Redundant Scara Robot Using Solidworks and Matlab/Simmechanicslayiro2Ainda não há avaliações
- Answer The Stresses Are 69.92 Mpa and - 38.67 Mpa and The Neutral Axis Is 38.6 MM From The Tensile EdgeDocumento3 páginasAnswer The Stresses Are 69.92 Mpa and - 38.67 Mpa and The Neutral Axis Is 38.6 MM From The Tensile Edgelayiro2Ainda não há avaliações
- IC Engine Cold Flow Tutorial R150Documento54 páginasIC Engine Cold Flow Tutorial R150layiro2100% (2)
- ModalAnalysisOfDriveShaftUsingFEA (4 7) 839f8a01 05f1 4cb7 9692 54b24438f5c7Documento4 páginasModalAnalysisOfDriveShaftUsingFEA (4 7) 839f8a01 05f1 4cb7 9692 54b24438f5c7layiro2Ainda não há avaliações
- Thermal Tut PDFDocumento7 páginasThermal Tut PDFlayiro2Ainda não há avaliações
- Substr Tut PDFDocumento12 páginasSubstr Tut PDFlayiro2Ainda não há avaliações
- Gear Train - Final PDFDocumento11 páginasGear Train - Final PDFlayiro2Ainda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Carrier Supra 644 Refrigeration Unit For TrucksDocumento2 páginasCarrier Supra 644 Refrigeration Unit For TrucksgoogleheadAinda não há avaliações
- 10 Technologies/Methods For Controlling Nox & Sox Emissions From ShipsDocumento2 páginas10 Technologies/Methods For Controlling Nox & Sox Emissions From ShipsRaji MNAinda não há avaliações
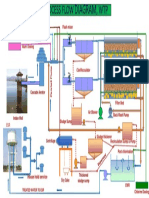
- WTP Process DiagramDocumento1 páginaWTP Process DiagramKumar AbhishekAinda não há avaliações
- Ductulator: S.P. Loss (Per 100 FT.) (In. of W.C.) Width (In.) X Duct Velocity Height (In.) (FPM)Documento8 páginasDuctulator: S.P. Loss (Per 100 FT.) (In. of W.C.) Width (In.) X Duct Velocity Height (In.) (FPM)joabjim8392Ainda não há avaliações
- Agrofarm 410 420 430 LP EN 02 12Documento119 páginasAgrofarm 410 420 430 LP EN 02 12Lacatusu Mircea100% (1)
- RecitationDocumento4 páginasRecitationSavaliya HardikAinda não há avaliações
- Problem 709 - Propped Beam With Spring Support: Stone Crusher Price ListDocumento2 páginasProblem 709 - Propped Beam With Spring Support: Stone Crusher Price Listmeda012Ainda não há avaliações
- Constitutive Equation and Normalized Carpet Plots of Symmetrical Fiber Reinforced LaminatesDocumento90 páginasConstitutive Equation and Normalized Carpet Plots of Symmetrical Fiber Reinforced LaminatesjoereisAinda não há avaliações
- IRN 15 18.5 KW (20 25 HP) IRN 22 30 KW (30 40 HP) : Operation and Maintenance ManualDocumento172 páginasIRN 15 18.5 KW (20 25 HP) IRN 22 30 KW (30 40 HP) : Operation and Maintenance ManualNikolay VelchevAinda não há avaliações
- Scan Plan (PAUT) For Taper Joints and K WeldsDocumento4 páginasScan Plan (PAUT) For Taper Joints and K WeldsRamakrishnan AmbiSubbiahAinda não há avaliações
- Item Code Item Name Item Class Brand Model Code Warehouse Group Warehouse Code Location Code Sales Price Available QtyDocumento8 páginasItem Code Item Name Item Class Brand Model Code Warehouse Group Warehouse Code Location Code Sales Price Available Qtyrahmat agungAinda não há avaliações
- NEW NEW: Silent Diesel Generating SetsDocumento2 páginasNEW NEW: Silent Diesel Generating SetsMladen MarićAinda não há avaliações
- KinematicsDocumento7 páginasKinematicsNicole WheelerAinda não há avaliações
- Hydraulic Fan System 966Documento4 páginasHydraulic Fan System 966Ahmed Rezk100% (2)
- PPF Multimedia CatalogDocumento24 páginasPPF Multimedia Catalogalperen52Ainda não há avaliações
- TutorialDocumento2 páginasTutorialsitumbeko undiAinda não há avaliações
- Underground Winding SystemsDocumento58 páginasUnderground Winding SystemsRuben Castro Quispe100% (1)
- Pressure Form Maint RepairDocumento1 páginaPressure Form Maint RepairJong Ponciano IIIAinda não há avaliações
- PROBLEM 17.137: SolutionDocumento7 páginasPROBLEM 17.137: SolutiontaAinda não há avaliações
- SwissDocumento8 páginasSwissRajaram RamanAinda não há avaliações
- ROHR2fesu FeaturelistDocumento20 páginasROHR2fesu FeaturelistJohan ConradieAinda não há avaliações
- Strength of Materials 4th Edition by Pytel and Singer CompressDocumento10 páginasStrength of Materials 4th Edition by Pytel and Singer CompressJohn Carlo EdejerAinda não há avaliações
- Mech Seal FundamentalsDocumento117 páginasMech Seal FundamentalsSri Sri100% (1)
- Revised Cleaning and Painting Piece Rate Data 02-07-2021Documento5 páginasRevised Cleaning and Painting Piece Rate Data 02-07-2021Corrosion FactoryAinda não há avaliações
- CEN TOOL Standard Padeyes V4 Rollup Padeye SheaveDocumento5 páginasCEN TOOL Standard Padeyes V4 Rollup Padeye SheaveMarvan100% (1)
- Lecture - 09 - Dimensional Analysis and SimilitudeDocumento11 páginasLecture - 09 - Dimensional Analysis and SimilitudeHizana D.SAinda não há avaliações
- PMSM 2012Documento62 páginasPMSM 2012Sreerag Kunnathu Sugathan100% (3)
- Lecture No: 10 (Lubrication in I.C.E) : 10.1 Function of Lubricating SystemDocumento5 páginasLecture No: 10 (Lubrication in I.C.E) : 10.1 Function of Lubricating Systemمصطفى العباديAinda não há avaliações
- Flat Wakaf Mek Zainab P1Documento1 páginaFlat Wakaf Mek Zainab P1Nur NaziraAinda não há avaliações
- 4011b PDFDocumento46 páginas4011b PDFlungu mihaiAinda não há avaliações