Você também pode gostar
- Programming Exercise 3: 3D Controller and Trajectory GenerationDocumento10 páginasProgramming Exercise 3: 3D Controller and Trajectory GenerationhemanthkandulaAinda não há avaliações
- SRV02-Series Ball & Beam: Student HandoutDocumento13 páginasSRV02-Series Ball & Beam: Student HandoutKeli KeyAinda não há avaliações
- PHYS 101 Final Exam SolutionsDocumento4 páginasPHYS 101 Final Exam SolutionsTuğba AydemirAinda não há avaliações
- Assignment 2Documento5 páginasAssignment 2rodrigocampospkAinda não há avaliações
- Me352 E1 Fa2009 SolDocumento21 páginasMe352 E1 Fa2009 SolSteve KrodaAinda não há avaliações
- 2 DOF Ball Balancer - Workbook (Instructor)Documento32 páginas2 DOF Ball Balancer - Workbook (Instructor)Raaj LavaAinda não há avaliações
- 2 DOF Ball Balancer - Workbook (Instructor) PDFDocumento32 páginas2 DOF Ball Balancer - Workbook (Instructor) PDFRaaj LavaAinda não há avaliações
- QuadeqDocumento7 páginasQuadeqОлександр РєзнікAinda não há avaliações
- Lecture-6 Coordinate TransformationsDocumento45 páginasLecture-6 Coordinate TransformationsDeepak TendolkarAinda não há avaliações
- O1 CoupledPendulamDocumento6 páginasO1 CoupledPendulamAbhroAinda não há avaliações
- Programming Exercise 2: Quadrotor Control in The Plane: 2.1 Coordinate SystemsDocumento5 páginasProgramming Exercise 2: Quadrotor Control in The Plane: 2.1 Coordinate SystemsCrubher ChinalcoAinda não há avaliações
- Gibbs & Apell EquationsDocumento9 páginasGibbs & Apell EquationsYeizerAinda não há avaliações
- Case Study 1A Bicycle Brake Lever Loading AnalysisDocumento4 páginasCase Study 1A Bicycle Brake Lever Loading AnalysisKORATASAIAinda não há avaliações
- Chapter 3-BalancingDocumento30 páginasChapter 3-BalancingHafzal GaniAinda não há avaliações
- Rolling Motion Problems SolvedDocumento11 páginasRolling Motion Problems SolvedanitaAinda não há avaliações
- Chaadaev 2009Documento6 páginasChaadaev 2009Claude ClaudeAinda não há avaliações
- BALANCINGDocumento72 páginasBALANCINGSerhat YıldırımAinda não há avaliações
- UEME3133 Lab 2Documento12 páginasUEME3133 Lab 2Ooizh HoengAinda não há avaliações
- n1 MATRIX ANALYSISDocumento28 páginasn1 MATRIX ANALYSISarjungireesh789Ainda não há avaliações
- Introduction To Robotics (CS223A) Homework #3 (Winter 2007/2008)Documento2 páginasIntroduction To Robotics (CS223A) Homework #3 (Winter 2007/2008)Shukrullo NazirjonovAinda não há avaliações
- BalancingDocumento70 páginasBalancingMohit SawwalakheAinda não há avaliações
- Engineering Dynamics of Machines AssignmentDocumento3 páginasEngineering Dynamics of Machines AssignmentSean BotelhoAinda não há avaliações
- A Hoisting Problem For Engineers: A Learning Experience in Machine Design 1Documento10 páginasA Hoisting Problem For Engineers: A Learning Experience in Machine Design 1Sachin DeswalAinda não há avaliações
- Lab Sheet Trif SuspensionDocumento4 páginasLab Sheet Trif SuspensionHUMAID SIDDIQUIAinda não há avaliações
- DPP 70 Rotation 17-11-2022Documento2 páginasDPP 70 Rotation 17-11-2022neoisonlyoneAinda não há avaliações
- Comparison of Explicit and Implicit Forms of The MPMMDocumento13 páginasComparison of Explicit and Implicit Forms of The MPMMZvonko TAinda não há avaliações
- Robotics Trajectory PlanningDocumento52 páginasRobotics Trajectory PlanningFinto RaphelAinda não há avaliações
- Electrostatics - INE SolutionsDocumento6 páginasElectrostatics - INE SolutionsParth KhandelwalAinda não há avaliações
- T FF R 1 2 F FF 33,000 FF V HP : Case Study of Power Transmission - Group 4 MemberDocumento4 páginasT FF R 1 2 F FF 33,000 FF V HP : Case Study of Power Transmission - Group 4 MemberHải Hoàng LýAinda não há avaliações
- Exercise 7 Dynamic Balancing of Rigid RotorsDocumento7 páginasExercise 7 Dynamic Balancing of Rigid RotorsAnonymous dqbb02DUhAinda não há avaliações
- Code-A Physics: Density M VDocumento32 páginasCode-A Physics: Density M VAkash KadaliAinda não há avaliações
- Dynamicstrifilar Suspension 2 JKCRECDocumento16 páginasDynamicstrifilar Suspension 2 JKCRECtoecrusher0% (1)
- Lateral Torsional Buckling of Web Tapered I Beams 1d and 3d Fem ApproachDocumento6 páginasLateral Torsional Buckling of Web Tapered I Beams 1d and 3d Fem ApproachKleber RamosAinda não há avaliações
- Lab 2Documento20 páginasLab 2anvermustafaev35Ainda não há avaliações
- JEE MINOR TEST PHYSICS SECTIONDocumento19 páginasJEE MINOR TEST PHYSICS SECTIONKalhan BhatAinda não há avaliações
- Displacements of Joints and Degrees of FreedomDocumento11 páginasDisplacements of Joints and Degrees of FreedomMae chelle San AndresAinda não há avaliações
- RCD Week3.2Documento8 páginasRCD Week3.2john leo ramirezAinda não há avaliações
- RCD - PPT - Part 4 PDFDocumento11 páginasRCD - PPT - Part 4 PDFJohnri RamirezAinda não há avaliações
- Chemistry 21b Spectroscopy - Lecture # 5: Rotation of Polyatomic MoleculesDocumento9 páginasChemistry 21b Spectroscopy - Lecture # 5: Rotation of Polyatomic MoleculesMddl2aAinda não há avaliações
- Inpho GT Lom KMDocumento11 páginasInpho GT Lom KMlash73752Ainda não há avaliações
- Objectives: Laboratory 4. The Analytical Kinematics of Mechanisms With The Vector MethodDocumento6 páginasObjectives: Laboratory 4. The Analytical Kinematics of Mechanisms With The Vector MethodGabriel IulianAinda não há avaliações
- 3-Ph Induction Motor ConstructionDocumento12 páginas3-Ph Induction Motor ConstructionPasupuleti Venkata RamanaAinda não há avaliações
- GyroscopeDocumento7 páginasGyroscopevijay2293Ainda não há avaliações
- Chapter 3-BalancingDocumento29 páginasChapter 3-BalancingDanielRaoAinda não há avaliações
- Machine Foundation-Calculation of Unbalance ForceDocumento6 páginasMachine Foundation-Calculation of Unbalance Forcesathiyaseelann.sAinda não há avaliações
- DPP 69 Rotation 16-11-2022 - ANSDocumento2 páginasDPP 69 Rotation 16-11-2022 - ANSneoisonlyoneAinda não há avaliações
- Basic Aerodynamics F18 Assignment 3Documento45 páginasBasic Aerodynamics F18 Assignment 3Lucas SilveiraAinda não há avaliações
- Accepted For Publication in American Journal of Physics On August 12, 2011Documento8 páginasAccepted For Publication in American Journal of Physics On August 12, 2011Hichem AbAinda não há avaliações
- Analysis of Beams and Frames Using Stiffness MethodDocumento73 páginasAnalysis of Beams and Frames Using Stiffness Methodsohail ahmedAinda não há avaliações
- Section 5Documento16 páginasSection 5api-26021617Ainda não há avaliações
- Reciprocating Balancing: Contents of This FileDocumento12 páginasReciprocating Balancing: Contents of This FileHidayatullah HidayatullahAinda não há avaliações
- One degree vibration experimentDocumento3 páginasOne degree vibration experimentLight OneAinda não há avaliações
- Ch09 SSM 070904Documento26 páginasCh09 SSM 070904VinhTranAinda não há avaliações
- Machine Transformations: J. MccalleyDocumento24 páginasMachine Transformations: J. Mccalleyedriel100Ainda não há avaliações
- Experiment 4 Pendulum Oscillation With PC Interface: Principle and TaskDocumento5 páginasExperiment 4 Pendulum Oscillation With PC Interface: Principle and TaskNguyễn Đức MạnhAinda não há avaliações
- Single Axis Text I J Mic 08075 FinalDocumento26 páginasSingle Axis Text I J Mic 08075 Finalali almorsedAinda não há avaliações
- ReportDocumento16 páginasReportMaxx PowerrAinda não há avaliações
- Practical No-5 (Curvilinear Motion)Documento8 páginasPractical No-5 (Curvilinear Motion)Jay V. GoyelAinda não há avaliações
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiAinda não há avaliações
- S RecoverDocumento1 páginaS RecoverLeonardo KnuppAinda não há avaliações
- ASIO4ALL v2 Instruction ManualDocumento11 páginasASIO4ALL v2 Instruction ManualDanny_Grafix_1728Ainda não há avaliações
- ANSYS Mechanical APDL Introductory TutorialsDocumento106 páginasANSYS Mechanical APDL Introductory TutorialsLeonardo Knupp100% (1)
- 2017Documento1 página2017Leonardo KnuppAinda não há avaliações
- Lec 13Documento13 páginasLec 13Leonardo KnuppAinda não há avaliações
- 990Documento1 página990Leonardo KnuppAinda não há avaliações
- 66Documento1 página66Leonardo KnuppAinda não há avaliações
- 77Documento1 página77Leonardo KnuppAinda não há avaliações
- 87Documento1 página87Leonardo KnuppAinda não há avaliações
- Build DateDocumento3 páginasBuild DateLeonardo KnuppAinda não há avaliações
- Key Components For Autonomous FlightDocumento6 páginasKey Components For Autonomous FlightLeonardo KnuppAinda não há avaliações
- Quadrotor Simulator PD ControllerDocumento3 páginasQuadrotor Simulator PD ControllerVinoth KumarAinda não há avaliações
- State Estimation without GPS or external camerasDocumento14 páginasState Estimation without GPS or external camerasLeonardo KnuppAinda não há avaliações
- Subtitle 2Documento1 páginaSubtitle 2Leonardo KnuppAinda não há avaliações
- Subtitle 2Documento1 páginaSubtitle 2Leonardo KnuppAinda não há avaliações
- Classical Mechanics MIT 8.01 Course NotesDocumento712 páginasClassical Mechanics MIT 8.01 Course Noteschodu007Ainda não há avaliações
- ApplicationDocumento7 páginasApplicationLeonardo KnuppAinda não há avaliações
- SubtitleDocumento1 páginaSubtitleLeonardo KnuppAinda não há avaliações
- GLG Part 1Documento13 páginasGLG Part 1Leonardo KnuppAinda não há avaliações
- QuadrotorsDocumento8 páginasQuadrotorsLeonardo KnuppAinda não há avaliações
- PIDtutorialDocumento13 páginasPIDtutorialalijnubyAinda não há avaliações
- 47 - Initiation PMP Question PDFDocumento16 páginas47 - Initiation PMP Question PDFSiva NarayanaAinda não há avaliações
- Moccu Agency PresentationDocumento44 páginasMoccu Agency PresentationCameron BellingAinda não há avaliações
- ZAPEX CouplingDocumento22 páginasZAPEX CouplingWaris La Joi WakatobiAinda não há avaliações
- Risks/Opportunities Analysis and Actions PlanningDocumento2 páginasRisks/Opportunities Analysis and Actions PlanningmarcmustreAinda não há avaliações
- BHEL Haridwar Block 2 Heavy Fabrication, Training ReportDocumento53 páginasBHEL Haridwar Block 2 Heavy Fabrication, Training ReportUdit Soni100% (5)
- Έπιπλα 2016714105722Documento1.199 páginasΈπιπλα 2016714105722Marcel LazarAinda não há avaliações
- AI in Automobile IndustryDocumento17 páginasAI in Automobile IndustryLeon Varghese100% (1)
- Log Unstd LLDocumento176 páginasLog Unstd LLVagner Aux CadAinda não há avaliações
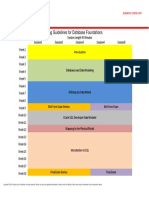
- DFo Course MapDocumento1 páginaDFo Course MapMilanAdzicAinda não há avaliações
- Bolt Design Based On BS Code:: Input DataDocumento14 páginasBolt Design Based On BS Code:: Input DataSURIYAAinda não há avaliações
- CV en Angel Niculae 2014Documento6 páginasCV en Angel Niculae 2014bobeluAinda não há avaliações
- Production Supervisor/ Dairy Companies /milk, Cheese, YougourtDocumento2 páginasProduction Supervisor/ Dairy Companies /milk, Cheese, YougourtkaramzahiAinda não há avaliações
- Insurance For Autonomous VehiclesDocumento20 páginasInsurance For Autonomous Vehiclesssagr123Ainda não há avaliações
- SQL Section 1 Quiz ResultsDocumento4 páginasSQL Section 1 Quiz ResultsPanda DamanikAinda não há avaliações
- BMW Technical Acronym GuideDocumento21 páginasBMW Technical Acronym GuideProfCBSjr100% (2)
- Donner CompanyDocumento4 páginasDonner CompanyFrancesco BrunoAinda não há avaliações
- Kedar DeshpandeDocumento4 páginasKedar DeshpandesunilarunaAinda não há avaliações
- Telescopic CylinderDocumento4 páginasTelescopic Cylindergapc210% (1)
- Faster wheel alignment with JOSAM truckaligner 180Documento4 páginasFaster wheel alignment with JOSAM truckaligner 180Deepak Kumar RautAinda não há avaliações
- Classic Lisa Frank Clog - CrocsDocumento1 páginaClassic Lisa Frank Clog - Crocsfaith JinjikaAinda não há avaliações
- Compatibility Testing of Arnco 150XT Summary DocumentDocumento3 páginasCompatibility Testing of Arnco 150XT Summary DocumentRodrigo FernándezAinda não há avaliações
- Kanban BasicsDocumento36 páginasKanban BasicsAuraAinda não há avaliações
- Non Disclosure Agreement - Beta TesterDocumento3 páginasNon Disclosure Agreement - Beta TesterRocketLawyer100% (3)
- 02 805Documento8 páginas02 805Fernando SabinoAinda não há avaliações
- Address:: Terminal Road 1 Corner, F. Imperial Street, Legazpi Port District, Legazpi City, Albay, PhilippinesDocumento4 páginasAddress:: Terminal Road 1 Corner, F. Imperial Street, Legazpi Port District, Legazpi City, Albay, PhilippinesYani BarriosAinda não há avaliações
- 5cdriveragrement PDFDocumento1 página5cdriveragrement PDFMilcoDuliAinda não há avaliações
- Csms PQ Emp Group PublicDocumento16 páginasCsms PQ Emp Group PublicAfif Said Hadjin100% (2)
- Ingersoll Rand Air Compresor Manual80441512sierratspartsmanualDocumento116 páginasIngersoll Rand Air Compresor Manual80441512sierratspartsmanualGiovanni B. S.100% (4)
- Design and Simulation of An AutoDocumento5 páginasDesign and Simulation of An AutoPuwa CalvinAinda não há avaliações
- Aplicação de Controle No Equilíbrio de Um Pêndulo Invertido Utilizando-Se Um Robô Feito Com o Kit LEGO MindstormsDocumento15 páginasAplicação de Controle No Equilíbrio de Um Pêndulo Invertido Utilizando-Se Um Robô Feito Com o Kit LEGO MindstormsJessika PaiolaAinda não há avaliações