Você também pode gostar
- Astro PDFDocumento19 páginasAstro PDFarijit mannaAinda não há avaliações
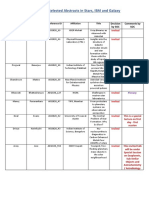
- ASI2015 Stars ISM and GalaxyDocumento14 páginasASI2015 Stars ISM and Galaxyarijit mannaAinda não há avaliações
- Physics-Astro 4th Sem PDFDocumento295 páginasPhysics-Astro 4th Sem PDFarijit mannaAinda não há avaliações
- META19 Poster TemplateDocumento1 páginaMETA19 Poster Templatearijit mannaAinda não há avaliações
- CASACalibrationSISS 2014Documento23 páginasCASACalibrationSISS 2014arijit mannaAinda não há avaliações
- Sadhukhan Enterprise - Howrah: Sanshis PharmaceuticalsDocumento2 páginasSadhukhan Enterprise - Howrah: Sanshis Pharmaceuticalsarijit mannaAinda não há avaliações
- Basic Imaging and Self-Calibration (T4 + T7) : John MckeanDocumento41 páginasBasic Imaging and Self-Calibration (T4 + T7) : John Mckeanarijit mannaAinda não há avaliações
- Iucaa NewDocumento17 páginasIucaa Newarijit mannaAinda não há avaliações
- Product at A Glance: Sanco DM SyrupDocumento1 páginaProduct at A Glance: Sanco DM Syruparijit mannaAinda não há avaliações
- Product at A Glance: Sanco DM SyrupDocumento1 páginaProduct at A Glance: Sanco DM Syruparijit mannaAinda não há avaliações
- CasaDocumento19 páginasCasaarijit mannaAinda não há avaliações
- CASACalibrationSISS 2014 PDFDocumento181 páginasCASACalibrationSISS 2014 PDFarijit mannaAinda não há avaliações
- ALMA QA2 Products v2.0Documento16 páginasALMA QA2 Products v2.0arijit mannaAinda não há avaliações
- BinaryStar Evo07Documento24 páginasBinaryStar Evo07arijit mannaAinda não há avaliações
- (Massive) Black Hole X-Ray Binaries: Roger Blandford KIPAC, Stanford +jane Dai, Steven Fuerst, Peter EggletonDocumento22 páginas(Massive) Black Hole X-Ray Binaries: Roger Blandford KIPAC, Stanford +jane Dai, Steven Fuerst, Peter Eggletonarijit mannaAinda não há avaliações
- Mathematics by N K SinghDocumento7 páginasMathematics by N K Singharijit mannaAinda não há avaliações
- (A) JRF/NET Option Details: (As Mentioned in Matriculation Certificate)Documento5 páginas(A) JRF/NET Option Details: (As Mentioned in Matriculation Certificate)arijit mannaAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Gravitation - PCDocumento36 páginasGravitation - PCFor YoutubeAinda não há avaliações
- 10th Science 1Documento8 páginas10th Science 1Daulatrao ShindeAinda não há avaliações
- Physical Science: Quarter 4: Week 1-7Documento34 páginasPhysical Science: Quarter 4: Week 1-7Mica MandocdocAinda não há avaliações
- PPSC Lecturer Mathematics Solved Paper 2020Documento31 páginasPPSC Lecturer Mathematics Solved Paper 2020Saprahshah100% (2)
- Introduction To Orbitalaft Engineers CHARTS REV ADocumento203 páginasIntroduction To Orbitalaft Engineers CHARTS REV Amariela baigorriaAinda não há avaliações
- Physical-Science q2 Week-1 EditedDocumento19 páginasPhysical-Science q2 Week-1 EditedMallari FamAinda não há avaliações
- Physics Dictionary KSSMDocumento51 páginasPhysics Dictionary KSSMMimie Sulaiman100% (1)
- Audemars Piguet Calibre 2120 and 2808Documento24 páginasAudemars Piguet Calibre 2120 and 2808Simon László100% (1)
- Introduction To AstronomyDocumento162 páginasIntroduction To AstronomymohamedAinda não há avaliações
- Physics Discussion.Documento37 páginasPhysics Discussion.Ejay EmpleoAinda não há avaliações
- Kepler's LawsDocumento13 páginasKepler's Lawsnaziratul100% (2)
- John Gribbin - in Search of The Edge of TimeDocumento218 páginasJohn Gribbin - in Search of The Edge of Timekitas7100% (1)
- The Laws of Planetary Motion: KeplerDocumento25 páginasThe Laws of Planetary Motion: KeplerMuhammad TawqeerAinda não há avaliações
- School Report 2Documento11 páginasSchool Report 2Ram SiddeshAinda não há avaliações
- 50 Physics Ideas You Really Need To KnowDocumento280 páginas50 Physics Ideas You Really Need To KnowmatijahajekAinda não há avaliações
- Weekly Home Learning Plan For Grade 12 - STEM Week No.: 2 Quarter No.: 2 Quarter Date: November 29-December 3, 2021Documento2 páginasWeekly Home Learning Plan For Grade 12 - STEM Week No.: 2 Quarter No.: 2 Quarter Date: November 29-December 3, 2021Shekaina Faith LozadaAinda não há avaliações
- SEMI-DETAILED LESSON PLAN FORMAT Week 3Documento6 páginasSEMI-DETAILED LESSON PLAN FORMAT Week 3Michael Clyde GurdielAinda não há avaliações
- Rotational Kinetic Energy: Learning OutcomeDocumento10 páginasRotational Kinetic Energy: Learning OutcomeBouatake HedstromAinda não há avaliações
- Assignment 8 - Geas: InstructionDocumento4 páginasAssignment 8 - Geas: InstructionJhoe TangoAinda não há avaliações
- General Physics 1: Science, Technology, Engineering and Mathematics (Stem)Documento21 páginasGeneral Physics 1: Science, Technology, Engineering and Mathematics (Stem)Theworld MagicAinda não há avaliações
- New Concepts in GravitationDocumento13 páginasNew Concepts in GravitationAce Ralph100% (1)
- Ebook PDF Vector Calculus 6th Edition by Jerrold e Marsden PDFDocumento41 páginasEbook PDF Vector Calculus 6th Edition by Jerrold e Marsden PDFmarie.simons156100% (40)
- Keplers LawsDocumento6 páginasKeplers LawsPulkit SharmaAinda não há avaliações
- GH 8Documento7 páginasGH 8jsschwartz123Ainda não há avaliações
- Entropy and Syntropy PDFDocumento23 páginasEntropy and Syntropy PDFClaudio ChagasAinda não há avaliações
- Sol 6Documento13 páginasSol 6akjsdnfAinda não há avaliações
- Theme: Newtonian Mechanics Chapter 3: GravitationDocumento11 páginasTheme: Newtonian Mechanics Chapter 3: GravitationvelavanAinda não há avaliações
- Gravitation: F MM 1 F D MM F D MM F G DDocumento6 páginasGravitation: F MM 1 F D MM F D MM F G DVenu GopalAinda não há avaliações
- Lesson 1 Ancient Greek Physics and Astronomy PDFDocumento123 páginasLesson 1 Ancient Greek Physics and Astronomy PDFJovelyn Avila100% (1)
- 2ND QTR Week One PhysciDocumento31 páginas2ND QTR Week One PhysciCamille ManlongatAinda não há avaliações