Você também pode gostar
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- RECRUITMENT AGENCIES IN U.A.E. (Here Is A List Containing 150+ Names)Documento22 páginasRECRUITMENT AGENCIES IN U.A.E. (Here Is A List Containing 150+ Names)raajc12380% (5)
- Clarifier Tank Skert2Documento20 páginasClarifier Tank Skert2ekmagisAinda não há avaliações
- Philippine Multimodal Transportation and Logistics Industry Roadmap - Key Recommendations - 2016.04.14Documento89 páginasPhilippine Multimodal Transportation and Logistics Industry Roadmap - Key Recommendations - 2016.04.14PortCalls50% (4)
- Annex 1C - Ice Plant and Cold Storage Inspection ChecklistDocumento9 páginasAnnex 1C - Ice Plant and Cold Storage Inspection ChecklistMaxmore Karumamupiyo100% (2)
- Lesson For SpreadsheetsDocumento69 páginasLesson For SpreadsheetsCrisna Rivera PundanoAinda não há avaliações
- U-Blox Parameters Setting ProtocolsDocumento2 páginasU-Blox Parameters Setting Protocolspedrito perezAinda não há avaliações
- The Reaction of CO2 With Ethanolamines PDFDocumento4 páginasThe Reaction of CO2 With Ethanolamines PDFekmagisAinda não há avaliações
- PCIB Vs ESCOLIN (G.R. No. L-27860 & L-27896)Documento61 páginasPCIB Vs ESCOLIN (G.R. No. L-27860 & L-27896)strgrlAinda não há avaliações
- Geotechnical Design MannulDocumento828 páginasGeotechnical Design MannulJie ZhouAinda não há avaliações
- Modelling Reactive Absorption of CO2 in Packed ColumnsDocumento9 páginasModelling Reactive Absorption of CO2 in Packed ColumnsekmagisAinda não há avaliações
- Instrumentation and Control Important Questions and AnswersDocumento72 páginasInstrumentation and Control Important Questions and AnswersAjay67% (6)
- Urea ModelingDocumento20 páginasUrea ModelingekmagisAinda não há avaliações
- Sec 11Documento3 páginasSec 11Vivek JhaAinda não há avaliações
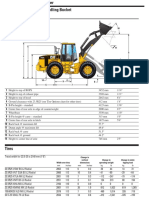
- Cat It62hDocumento4 páginasCat It62hMarceloAinda não há avaliações
- Influence of Intellectual Capital in The Organizational InnovationDocumento8 páginasInfluence of Intellectual Capital in The Organizational InnovationsopingiAinda não há avaliações
- Universal Marine: Welcome To Our One Stop Marine ServicesDocumento8 páginasUniversal Marine: Welcome To Our One Stop Marine Serviceshoangtruongson1111Ainda não há avaliações
- Security Enhancement in 2016 SQL ServerDocumento21 páginasSecurity Enhancement in 2016 SQL ServerAtul SharmaAinda não há avaliações
- Lich King Chorus PDFDocumento21 páginasLich King Chorus PDFMacgy YeungAinda não há avaliações
- The Truth About Customer ExperienceDocumento11 páginasThe Truth About Customer Experienceaksr27Ainda não há avaliações
- Trahar (2013) - Internationalization of The CurriculumDocumento13 páginasTrahar (2013) - Internationalization of The CurriculumUriel TorresAinda não há avaliações
- Raspberry Pi Installing Noobs OSDocumento3 páginasRaspberry Pi Installing Noobs OSEXORCEAinda não há avaliações
- Title To The ProjectDocumento14 páginasTitle To The ProjectJatinChadhaAinda não há avaliações
- Partes Oki - MPS5501B - RSPL - Rev - HDocumento12 páginasPartes Oki - MPS5501B - RSPL - Rev - HJaiber Eduardo Gutierrez OrtizAinda não há avaliações
- Chap 14Documento31 páginasChap 14Dipti Bhavin DesaiAinda não há avaliações
- Piccadilly Circus BusDocumento1 páginaPiccadilly Circus Busmeylota2Ainda não há avaliações
- Ara FormDocumento2 páginasAra Formjerish estemAinda não há avaliações
- Heirs of Tancoco v. CADocumento28 páginasHeirs of Tancoco v. CAChris YapAinda não há avaliações
- Profile Romblon IslandDocumento10 páginasProfile Romblon Islandderella starsAinda não há avaliações
- FM - 30 MCQDocumento8 páginasFM - 30 MCQsiva sankarAinda não há avaliações
- National Action Plan Implementation Gaps and SuccessesDocumento8 páginasNational Action Plan Implementation Gaps and SuccessesHamza MinhasAinda não há avaliações
- 1 Introduction To Pharmaceutical Dosage Forms Part1Documento32 páginas1 Introduction To Pharmaceutical Dosage Forms Part1Joanna Carla Marmonejo Estorninos-Walker100% (1)
- MushroomDocumento8 páginasMushroomAkshay AhlawatAinda não há avaliações
- The 9 Best Reasons To Choose ZultysDocumento13 páginasThe 9 Best Reasons To Choose ZultysGreg EickeAinda não há avaliações
- Applicant Details : Government of Tamilnadu Application Form For Vehicle E-Pass For Essential ServicesDocumento1 páginaApplicant Details : Government of Tamilnadu Application Form For Vehicle E-Pass For Essential ServicesŠářoĵ PrinceAinda não há avaliações