Você também pode gostar
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Aries Computer Repair SolutionsDocumento9 páginasAries Computer Repair SolutionsedalzurcAinda não há avaliações
- Guide To Raising Capital From Angel Investors Ebook From The Startup Garage PDFDocumento20 páginasGuide To Raising Capital From Angel Investors Ebook From The Startup Garage PDFLars VonTurboAinda não há avaliações
- 3d Control Sphere Edge and Face StudyDocumento4 páginas3d Control Sphere Edge and Face Studydjbroussard100% (2)
- The Soviet-Israeli War, 1967-1973 The USSR's Military Intervention in The Egyptian-Israeli ConflictDocumento539 páginasThe Soviet-Israeli War, 1967-1973 The USSR's Military Intervention in The Egyptian-Israeli Conflictacoppa100% (5)
- The Soviet-Israeli War, 1967-1973 The USSR's Military Intervention in The Egyptian-Israeli ConflictDocumento539 páginasThe Soviet-Israeli War, 1967-1973 The USSR's Military Intervention in The Egyptian-Israeli Conflictacoppa100% (5)
- Uniform-Section Disk Spring AnalysisDocumento10 páginasUniform-Section Disk Spring Analysischristos032Ainda não há avaliações
- History of Microfinance in NigeriaDocumento9 páginasHistory of Microfinance in Nigeriahardmanperson100% (1)
- Audi Q5: First Generation (Typ 8R 2008-2017)Documento19 páginasAudi Q5: First Generation (Typ 8R 2008-2017)roberto100% (1)
- The Geometric Series of A Matrix: Charlie WatsonDocumento5 páginasThe Geometric Series of A Matrix: Charlie WatsonYasser NaguibAinda não há avaliações
- DFT and Double CodebookDocumento5 páginasDFT and Double CodebookYasser NaguibAinda não há avaliações
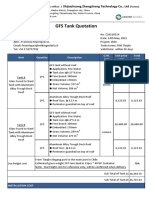
- GFS Tank Quotation C20210514Documento4 páginasGFS Tank Quotation C20210514Francisco ManriquezAinda não há avaliações
- PHD ThesisDocumento165 páginasPHD ThesisYasser NaguibAinda não há avaliações
- Mean Mode MedianDocumento4 páginasMean Mode MedianYasser NaguibAinda não há avaliações
- Generate N-Dimensional Rotation Matrices in Few StepsDocumento8 páginasGenerate N-Dimensional Rotation Matrices in Few StepsYasser NaguibAinda não há avaliações
- The Median of A Set of DataDocumento3 páginasThe Median of A Set of DataYasser NaguibAinda não há avaliações
- Roth 2017Documento13 páginasRoth 2017Yasser NaguibAinda não há avaliações
- Structures in Lte TDD and Lte FDD - AspxDocumento3 páginasStructures in Lte TDD and Lte FDD - AspxYasser NaguibAinda não há avaliações
- A War Too Far PDFDocumento319 páginasA War Too Far PDFMoses Omino100% (1)
- Gat1967 PDFDocumento28 páginasGat1967 PDFYasser NaguibAinda não há avaliações
- Codebook NokiaDocumento12 páginasCodebook NokiaYasser NaguibAinda não há avaliações
- Lecture 6Documento53 páginasLecture 6Yasser NaguibAinda não há avaliações
- Orthogonal Matrix Decomposition and ApplicationsDocumento53 páginasOrthogonal Matrix Decomposition and ApplicationsYasser NaguibAinda não há avaliações
- Good SomethingDocumento14 páginasGood SomethingYasser NaguibAinda não há avaliações
- Good SomethingDocumento14 páginasGood SomethingYasser NaguibAinda não há avaliações
- Good SomethingDocumento1 páginaGood SomethingYasser NaguibAinda não há avaliações
- Exploiting Spatial Channel Covariance For HybridDocumento14 páginasExploiting Spatial Channel Covariance For HybridYasser NaguibAinda não há avaliações
- Whitened Channel EstimationDocumento19 páginasWhitened Channel EstimationYasser NaguibAinda não há avaliações
- Hello, World ThanksDocumento1 páginaHello, World ThanksYasser NaguibAinda não há avaliações
- BER Performance Improvement in OFDM System With ZFE and MMSE EqualizersDocumento5 páginasBER Performance Improvement in OFDM System With ZFE and MMSE EqualizersYasser NaguibAinda não há avaliações
- Bajwa SP CH Dsp09Documento6 páginasBajwa SP CH Dsp09Yasser NaguibAinda não há avaliações
- Colored Gaussian Noise 2Documento5 páginasColored Gaussian Noise 2Yasser NaguibAinda não há avaliações
- Codebook Design For Lte-AdvDocumento5 páginasCodebook Design For Lte-AdvYasser NaguibAinda não há avaliações
- Static AlDocumento18 páginasStatic AlYasser NaguibAinda não há avaliações
- Codebook Design For Lte-AdvDocumento5 páginasCodebook Design For Lte-AdvYasser NaguibAinda não há avaliações
- Nearest QDocumento7 páginasNearest QYasser NaguibAinda não há avaliações
- MIMO DesignDocumento11 páginasMIMO DesignYasser NaguibAinda não há avaliações
- Paper 4 (A) (I) IGCSE Biology (Time - 30 Mins)Documento12 páginasPaper 4 (A) (I) IGCSE Biology (Time - 30 Mins)Hisham AlEnaiziAinda não há avaliações
- Form 4 Additional Mathematics Revision PatDocumento7 páginasForm 4 Additional Mathematics Revision PatJiajia LauAinda não há avaliações
- 7 Aleksandar VladimirovDocumento6 páginas7 Aleksandar VladimirovDante FilhoAinda não há avaliações
- I Will Be Here TABSDocumento7 páginasI Will Be Here TABSEric JaoAinda não há avaliações
- Checklist of Requirements For OIC-EW Licensure ExamDocumento2 páginasChecklist of Requirements For OIC-EW Licensure Examjonesalvarezcastro60% (5)
- ALXSignature0230 0178aDocumento3 páginasALXSignature0230 0178aAlex MocanuAinda não há avaliações
- EIRA v0.8.1 Beta OverviewDocumento33 páginasEIRA v0.8.1 Beta OverviewAlexQuiñonesNietoAinda não há avaliações
- A Database of Chromatographic Properties and Mass Spectra of Fatty Acid Methyl Esters From Omega-3 ProductsDocumento9 páginasA Database of Chromatographic Properties and Mass Spectra of Fatty Acid Methyl Esters From Omega-3 ProductsmisaelAinda não há avaliações
- BenchmarkDocumento4 páginasBenchmarkKiran KumarAinda não há avaliações
- Kalley Ltdn40k221twam Chassis msd6308 SM PDFDocumento49 páginasKalley Ltdn40k221twam Chassis msd6308 SM PDFjulio cesar calveteAinda não há avaliações
- Rapport DharaviDocumento23 páginasRapport DharaviUrbanistes du MondeAinda não há avaliações
- Get Oracle Order DetailsDocumento4 páginasGet Oracle Order Detailssiva_lordAinda não há avaliações
- Developing the cycle of maslahah based performance management system implementationDocumento27 páginasDeveloping the cycle of maslahah based performance management system implementationM Audito AlfansyahAinda não há avaliações
- United-nations-Organization-uno Solved MCQs (Set-4)Documento8 páginasUnited-nations-Organization-uno Solved MCQs (Set-4)SãñÂt SûRÿá MishraAinda não há avaliações
- Ratio Analysis of PIADocumento16 páginasRatio Analysis of PIAMalik Saad Noman100% (5)
- Display PDFDocumento6 páginasDisplay PDFoneoceannetwork3Ainda não há avaliações
- LSMW With Rfbibl00Documento14 páginasLSMW With Rfbibl00abbasx0% (1)
- CBSE Class 6 Whole Numbers WorksheetDocumento2 páginasCBSE Class 6 Whole Numbers WorksheetPriyaprasad PandaAinda não há avaliações
- 2018 NAMCYA CHILDREN'S RONDALLA ENSEMBLE GuidelinesDocumento3 páginas2018 NAMCYA CHILDREN'S RONDALLA ENSEMBLE GuidelinesJohn Cedrick JagapeAinda não há avaliações
- Chromate Free CoatingsDocumento16 páginasChromate Free CoatingsbaanaadiAinda não há avaliações
- Production of Sodium Chlorite PDFDocumento13 páginasProduction of Sodium Chlorite PDFangelofgloryAinda não há avaliações
- Ball Valves Pentair Valves and ControlsDocumento16 páginasBall Valves Pentair Valves and ControlsABDUL KADHARAinda não há avaliações