Você também pode gostar
- Tentative Technical ProgramDocumento16 páginasTentative Technical ProgramFaouzi TlemcenAinda não há avaliações
- CHINT NDK TransformerDocumento3 páginasCHINT NDK TransformertqhunghnAinda não há avaliações
- Decentralized Web Framework PostdocDocumento2 páginasDecentralized Web Framework PostdocFaouzi TlemcenAinda não há avaliações
- Book Reviews: J. Aerojol Sci.Documento1 páginaBook Reviews: J. Aerojol Sci.Faouzi TlemcenAinda não há avaliações
- Manual Supplement: © 2006-2015 Fluke Corporation. All Rights ReservedDocumento4 páginasManual Supplement: © 2006-2015 Fluke Corporation. All Rights ReservedFaouzi TlemcenAinda não há avaliações
- Mouse Models of Inflammatory Bowel Disease For Investigating Mucosal Immunity in The IntestineDocumento6 páginasMouse Models of Inflammatory Bowel Disease For Investigating Mucosal Immunity in The IntestineFaouzi TlemcenAinda não há avaliações
- Programme - Eage-Alnaft Geoscience Workshop 2019Documento6 páginasProgramme - Eage-Alnaft Geoscience Workshop 2019Faouzi TlemcenAinda não há avaliações
- ISBN 0131457578 Marketing Management 12e Chapter01Documento29 páginasISBN 0131457578 Marketing Management 12e Chapter01Deepika ChauhanAinda não há avaliações
- 001-80994 AN80994 Design Considerations For Electrical Fast Transient EFT Immunity PDFDocumento48 páginas001-80994 AN80994 Design Considerations For Electrical Fast Transient EFT Immunity PDFFaouzi TlemcenAinda não há avaliações
- ISBN 0131457578 Marketing Management 12e Chapter01Documento29 páginasISBN 0131457578 Marketing Management 12e Chapter01Deepika ChauhanAinda não há avaliações
- Decentralized Web Framework PostdocDocumento2 páginasDecentralized Web Framework PostdocFaouzi TlemcenAinda não há avaliações
- Crystallochemical Classifications OF Phyllosilicates Based On The Unified System of Projection of Chemical Composition: Iii. The Serpentine-Kaolin GroupDocumento6 páginasCrystallochemical Classifications OF Phyllosilicates Based On The Unified System of Projection of Chemical Composition: Iii. The Serpentine-Kaolin GroupFaouzi TlemcenAinda não há avaliações
- Digital Multimeters: Users ManualDocumento32 páginasDigital Multimeters: Users ManualFaouzi TlemcenAinda não há avaliações
- 4 Eme Articl Culture CellDocumento6 páginas4 Eme Articl Culture CellFaouzi TlemcenAinda não há avaliações
- Calibracion 87vDocumento36 páginasCalibracion 87vcalamandro saezAinda não há avaliações
- Transient Simulation of Synchronous Generators Using Time-Stepping FEMDocumento1 páginaTransient Simulation of Synchronous Generators Using Time-Stepping FEMFaouzi TlemcenAinda não há avaliações
- Basna Paper ID ICCIET454 Pranav K. JaniDocumento6 páginasBasna Paper ID ICCIET454 Pranav K. JaniFaouzi TlemcenAinda não há avaliações
- Differential Evolution With Composite Trial Vector Generation Strategies and Control ParametersDocumento12 páginasDifferential Evolution With Composite Trial Vector Generation Strategies and Control ParametersFaouzi TlemcenAinda não há avaliações
- Java Performance in FEMDocumento6 páginasJava Performance in FEMKo Than SoeAinda não há avaliações
- Digital Multimeters: Users ManualDocumento32 páginasDigital Multimeters: Users ManualFaouzi TlemcenAinda não há avaliações
- Forward 01Documento1 páginaForward 01Faouzi TlemcenAinda não há avaliações
- An Orthogonal Design Based Constrained Evolutionary Optimization AlgorithmDocumento22 páginasAn Orthogonal Design Based Constrained Evolutionary Optimization AlgorithmFaouzi TlemcenAinda não há avaliações
- 002 Ac Thermal Load Calculation (Substation)Documento1 página002 Ac Thermal Load Calculation (Substation)Faouzi TlemcenAinda não há avaliações
- Impact of Large Numbers of CFLs On Distribution SystemsDocumento3 páginasImpact of Large Numbers of CFLs On Distribution SystemsFaouzi TlemcenAinda não há avaliações
- Bulk Power Gridtech 070201 V1aDocumento20 páginasBulk Power Gridtech 070201 V1aFaouzi TlemcenAinda não há avaliações
- 00-AA01 CDB001 AISGIS CivilDescription ToCustomer Rev ADocumento29 páginas00-AA01 CDB001 AISGIS CivilDescription ToCustomer Rev AFaouzi TlemcenAinda não há avaliações
- SiemensPowerAcademyTD Katalog en 2014Documento92 páginasSiemensPowerAcademyTD Katalog en 2014Faouzi TlemcenAinda não há avaliações
- Samco Saj Saudia AramcoDocumento62 páginasSamco Saj Saudia AramcoFaouzi TlemcenAinda não há avaliações
- CDA20202Documento77 páginasCDA20202sdaniel1979Ainda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Power TransformerDocumento51 páginasPower TransformerNicholas FosterAinda não há avaliações
- Cha 2Documento72 páginasCha 2Yheyis Mitike FaresAinda não há avaliações
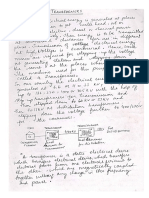
- Electrical Transformer Is A Static Electrical Machine Which Transforms Electrical Power From One Circuit To Another CircuitDocumento35 páginasElectrical Transformer Is A Static Electrical Machine Which Transforms Electrical Power From One Circuit To Another CircuitNh Chuminda YapaAinda não há avaliações
- Shpilman - "Comfort" GeneratorDocumento11 páginasShpilman - "Comfort" GeneratorLeon BlažinovićAinda não há avaliações
- Analyzing TransformersDocumento16 páginasAnalyzing TransformersSharvinder SinghAinda não há avaliações
- Science Grade 5 Electromagnet Lesson Plan MaputeDocumento10 páginasScience Grade 5 Electromagnet Lesson Plan MaputeRosedel Peteros MaputeAinda não há avaliações
- PHYSICS Investigatory Project TransformerDocumento24 páginasPHYSICS Investigatory Project TransformerPratibha Singh46% (13)
- Cambridge IGCSE: Physics 0625/22Documento20 páginasCambridge IGCSE: Physics 0625/22Bara' HammadehAinda não há avaliações
- BH Curve PDFDocumento7 páginasBH Curve PDFAviteshAinda não há avaliações
- Magnetism FundamentalsDocumento20 páginasMagnetism FundamentalsInterogator5Ainda não há avaliações
- ELE637 Chapter1Documento19 páginasELE637 Chapter1supermannonAinda não há avaliações
- Magnetic Integration For Interleaved Converters: P. Zumel, O. García, J. A. Cobos and J. UcedaDocumento7 páginasMagnetic Integration For Interleaved Converters: P. Zumel, O. García, J. A. Cobos and J. Ucedaraza239Ainda não há avaliações
- New PPT Presentation 12Documento14 páginasNew PPT Presentation 12Ayush0% (1)
- CT Catalogue0804and0905Documento22 páginasCT Catalogue0804and0905Jorge Luis Cid TepoleAinda não há avaliações
- 01 - Introduction of TransformerDocumento43 páginas01 - Introduction of TransformerDanielle Aubrey TerencioAinda não há avaliações
- Physics 33 - Electromagnetic Effects 2Documento80 páginasPhysics 33 - Electromagnetic Effects 2Hakim AbbasAinda não há avaliações
- High-Speed (MHZ) Series Resonant Converter (SRC)Documento12 páginasHigh-Speed (MHZ) Series Resonant Converter (SRC)teomondoAinda não há avaliações
- Kavika Internship Loki FinDocumento49 páginasKavika Internship Loki FinMAHESH V100% (4)
- 135 TOP TransformersDocumento39 páginas135 TOP TransformersEngr Umar AshrafAinda não há avaliações
- Nonlinear Dynamics of Magnetic Bearing SystemsDocumento67 páginasNonlinear Dynamics of Magnetic Bearing Systemsbitconcepts9781Ainda não há avaliações
- Amorphous Metal TransformersDocumento17 páginasAmorphous Metal TransformersAnjeri PhelestusAinda não há avaliações
- Mock Test pdf-2Documento7 páginasMock Test pdf-2Dr Johnson Y FUTURE HUB for StudentsAinda não há avaliações
- Transformer Notes PDFDocumento18 páginasTransformer Notes PDFArchana Diwakar Ranjish100% (12)
- En - Wurth Design Considerations Munich PDFDocumento52 páginasEn - Wurth Design Considerations Munich PDFSiva RamanAinda não há avaliações
- History of Electromagnetic Testing: HapterDocumento17 páginasHistory of Electromagnetic Testing: HapterBuo Khalid Al MareeAinda não há avaliações
- SIMPLE DC GeneratorDocumento7 páginasSIMPLE DC GeneratorDavies MasumbaAinda não há avaliações
- Free Energy SurpriseDocumento21 páginasFree Energy SurpriseJeanJones100% (3)