Você também pode gostar
- The Rate Monotonic Scheduling Algorithm: Exact Characterization and Average Case BehaviorDocumento6 páginasThe Rate Monotonic Scheduling Algorithm: Exact Characterization and Average Case BehaviorazadiractaAinda não há avaliações
- EE5900 Advanced Embedded System For Smart Infrastructure: RMS and EDF SchedulingDocumento35 páginasEE5900 Advanced Embedded System For Smart Infrastructure: RMS and EDF Schedulingkarvind08Ainda não há avaliações
- Unit 2 Clock-Driven Scheduling: 5.1 Notations and AssumptionsDocumento18 páginasUnit 2 Clock-Driven Scheduling: 5.1 Notations and Assumptions一鸿Ainda não há avaliações
- Task Scheduling IDocumento21 páginasTask Scheduling IbennettmatthewAinda não há avaliações
- Scheduling With RMADocumento8 páginasScheduling With RMAAnusha KannanAinda não há avaliações
- Scheduling PDFDocumento6 páginasScheduling PDFAndrew LeeAinda não há avaliações
- Unit 5Documento19 páginasUnit 5Bindu m.kAinda não há avaliações
- Edf PDFDocumento60 páginasEdf PDFNSAinda não há avaliações
- Lesson 30Documento24 páginasLesson 30Suranga SampathAinda não há avaliações
- Clock-Driven Scheduling: Notations and AssumptionsDocumento11 páginasClock-Driven Scheduling: Notations and Assumptionsnimarose 11Ainda não há avaliações
- Deadline First Algorithm - DerejeDocumento60 páginasDeadline First Algorithm - DerejeDarajjee DhufeeraaAinda não há avaliações
- COEN 320 Midterm 2 Cheat Sheet FINALDocumento2 páginasCOEN 320 Midterm 2 Cheat Sheet FINALRavjotdeep KaurAinda não há avaliações
- Clock-Driven SchedulingDocumento5 páginasClock-Driven Schedulingneetika guptaAinda não há avaliações
- Chapte4 ZamznDocumento24 páginasChapte4 ZamznAHMED DARAJAinda não há avaliações
- An Alternating Direction Explicit (ADE) Scheme For Time-Dependent Evolution EquationsDocumento21 páginasAn Alternating Direction Explicit (ADE) Scheme For Time-Dependent Evolution EquationsEL KingAinda não há avaliações
- 1 Allocation/Scheduling Problem StatementDocumento32 páginas1 Allocation/Scheduling Problem StatementArindam DasAinda não há avaliações
- 1 Allocation/Scheduling Problem StatementDocumento32 páginas1 Allocation/Scheduling Problem StatementArindam DasAinda não há avaliações
- CS 5 - RTOS-21.08.2021 - Priority Based Scheduling and Laxity Strategie For Dependent TasksDocumento20 páginasCS 5 - RTOS-21.08.2021 - Priority Based Scheduling and Laxity Strategie For Dependent Tasksneetika guptaAinda não há avaliações
- Santosh V Hegde-2022HT01035-ESZG553 RTSDocumento7 páginasSantosh V Hegde-2022HT01035-ESZG553 RTSsantosh vighneshwar hegdeAinda não há avaliações
- A Brief Introduction To Laplace Transformation - As Applied in Vibrations IDocumento9 páginasA Brief Introduction To Laplace Transformation - As Applied in Vibrations Ikravde1024Ainda não há avaliações
- 1 Interval Scheduling: Maximize Intervals Scheduled: 1.1 ProblemDocumento9 páginas1 Interval Scheduling: Maximize Intervals Scheduled: 1.1 ProblemAPurv TaunkAinda não há avaliações
- Synchronization NotesDocumento9 páginasSynchronization NotesSudha PatelAinda não há avaliações
- 10 1 1 50Documento6 páginas10 1 1 50Alex KayrinAinda não há avaliações
- Logical Execution Time Implementation in AUTOSARDocumento7 páginasLogical Execution Time Implementation in AUTOSAR天黑黑Ainda não há avaliações
- Priority Scheduling Based On DeadlineDocumento4 páginasPriority Scheduling Based On Deadlinenarendra29000Ainda não há avaliações
- EC-Lab - Application Note #50 01/2014 Maths Reminder For Electrochemists Part II: The Simplicity of Laplace Transform I - IntroductionDocumento4 páginasEC-Lab - Application Note #50 01/2014 Maths Reminder For Electrochemists Part II: The Simplicity of Laplace Transform I - IntroductionR.SubramanianAinda não há avaliações
- How To Find Time Complexity of An AlgorithmDocumento8 páginasHow To Find Time Complexity of An AlgorithmGaurav UntawaleAinda não há avaliações
- Tutorial3 SolutionsDocumento3 páginasTutorial3 SolutionskatrvuAinda não há avaliações
- MIT6 046JS15 Lec01Documento6 páginasMIT6 046JS15 Lec01Cajun SefAinda não há avaliações
- Chapter 5 AhmedDocumento33 páginasChapter 5 AhmedAHMED DARAJAinda não há avaliações
- Approximation Algorithms: Slides by Kevin Wayne. All Rights ReservedDocumento47 páginasApproximation Algorithms: Slides by Kevin Wayne. All Rights ReservedAttilio UrbaniAinda não há avaliações
- MEC3457 Computer Lab 1 PDFDocumento8 páginasMEC3457 Computer Lab 1 PDFMuhammad Abbas RawjaniAinda não há avaliações
- Uniprocessor Scheduling Algorithms. As Shown in Figure 3.3, Uniprocessor Scheduling Is PartDocumento8 páginasUniprocessor Scheduling Algorithms. As Shown in Figure 3.3, Uniprocessor Scheduling Is PartjagruthimsAinda não há avaliações
- Big O Notation For Time Complexity of AlgorithmsDocumento6 páginasBig O Notation For Time Complexity of AlgorithmsfreemhAinda não há avaliações
- Chapter 4Documento30 páginasChapter 4Marwa AbdaliAinda não há avaliações
- Lec 11Documento52 páginasLec 11pranavjibhakateAinda não há avaliações
- Various Mathematical Programming Formulations For A General One Machine Sequencing ProblemDocumento6 páginasVarious Mathematical Programming Formulations For A General One Machine Sequencing ProblemMohamed MansourAinda não há avaliações
- RTOS1Documento23 páginasRTOS12015mdaamir2015Ainda não há avaliações
- Round Robin Scheduling in RL-RTX ExperimentDocumento2 páginasRound Robin Scheduling in RL-RTX ExperimentSuketAinda não há avaliações
- Ifac2012 Working With Time-Delay Systems in MATLAB Suat GumussoyDocumento6 páginasIfac2012 Working With Time-Delay Systems in MATLAB Suat GumussoyBouazizi HechmiAinda não há avaliações
- Lre-Tl Cited 2Documento22 páginasLre-Tl Cited 2vjkant.nAinda não há avaliações
- Laplace TransformsDocumento122 páginasLaplace TransformsChiraag ChiruAinda não há avaliações
- 10 RM DM Scheduling of Periodic TasksDocumento16 páginas10 RM DM Scheduling of Periodic Tasksbevan678Ainda não há avaliações
- DBMS Solved QB+Desc-pages-deleted - RemovedDocumento28 páginasDBMS Solved QB+Desc-pages-deleted - RemovedAntónio FreitasAinda não há avaliações
- 1 PRAM Model: 1.1 Sequential Model of ComputationDocumento12 páginas1 PRAM Model: 1.1 Sequential Model of ComputationS M Atik Hasan RohanAinda não há avaliações
- Real Time System - : BITS PilaniDocumento42 páginasReal Time System - : BITS PilanivithyaAinda não há avaliações
- The Limited Preemption Uniprocessor Scheduling of Sporadic Task SystemsDocumento23 páginasThe Limited Preemption Uniprocessor Scheduling of Sporadic Task SystemsAnuvratSinghAinda não há avaliações
- Dynamic Vs Static SystemDocumento12 páginasDynamic Vs Static SystemMohammed MuzzamilAinda não há avaliações
- 13 Aperiodic Sporadic Tasks 2Documento13 páginas13 Aperiodic Sporadic Tasks 2gauravgd16Ainda não há avaliações
- CNE210 Chapter 4.1Documento11 páginasCNE210 Chapter 4.1Ahmed SaidAinda não há avaliações
- LQ 6-1Documento15 páginasLQ 6-1abdullahAinda não há avaliações
- Period, The Higher The Priority. Since The Rate - of Job Releases - of A Task Is TheDocumento4 páginasPeriod, The Higher The Priority. Since The Rate - of Job Releases - of A Task Is TheEaswar VemulapalliAinda não há avaliações
- Introduction To Real Time Systems: Hard RT Systems Soft RT SystemsDocumento6 páginasIntroduction To Real Time Systems: Hard RT Systems Soft RT Systemsvinod kapateAinda não há avaliações
- This Study Resource Was: Tutorial 5Documento5 páginasThis Study Resource Was: Tutorial 5Jawad AliAinda não há avaliações
- Oscillatory Motion Control of Hinged Body Using ControllerDocumento8 páginasOscillatory Motion Control of Hinged Body Using ControlleresatjournalsAinda não há avaliações
- 1 Multiprocessor Scheduling With Precedence Constraints: 1.1 Problem DescriptionDocumento5 páginas1 Multiprocessor Scheduling With Precedence Constraints: 1.1 Problem DescriptionssfofoAinda não há avaliações
- Assignment 1 - SolutionDocumento1 páginaAssignment 1 - SolutionbabarirfanaliAinda não há avaliações
- S4ifhrv Eei0UhJHr7BeEg TinyOS-Howto PDFDocumento4 páginasS4ifhrv Eei0UhJHr7BeEg TinyOS-Howto PDFYoussef MantouranAinda não há avaliações
- Answers Assignment2 PDFDocumento1 páginaAnswers Assignment2 PDFbabarirfanaliAinda não há avaliações
- Intelligent Scheduling With Machine Learning Capabilities The Induction of Scheduling KnowledgeDocumento38 páginasIntelligent Scheduling With Machine Learning Capabilities The Induction of Scheduling KnowledgebabarirfanaliAinda não há avaliações
- Operating Systems Concepts MCQsDocumento56 páginasOperating Systems Concepts MCQsbabarirfanaliAinda não há avaliações
- CSS 2018 Written Part Result PDFDocumento9 páginasCSS 2018 Written Part Result PDFbabarirfanaliAinda não há avaliações
- Energy Aware Scheduling For Distributed Real-Time SystemsDocumento9 páginasEnergy Aware Scheduling For Distributed Real-Time SystemsbabarirfanaliAinda não há avaliações
- Weinig Rondamat 960 PDFDocumento16 páginasWeinig Rondamat 960 PDFCimpean AlexandruAinda não há avaliações
- Toshiba 37XV733 Anleitung PDFDocumento3 páginasToshiba 37XV733 Anleitung PDFW_O_KAinda não há avaliações
- Reuse of Textile e Uent Treatment Plant Sludge in Building MaterialsDocumento7 páginasReuse of Textile e Uent Treatment Plant Sludge in Building MaterialsPriya PinkyAinda não há avaliações
- Catalog RAFI Components 2015Documento663 páginasCatalog RAFI Components 2015Amd Mamd100% (1)
- Beam-Column Self Study Report by Othman and HaniDocumento29 páginasBeam-Column Self Study Report by Othman and Haniozzieastro100% (2)
- Kool Calc GuideDocumento24 páginasKool Calc GuideAlonso MejíaAinda não há avaliações
- Power Xpert Power Quality Meters: Product FocusDocumento20 páginasPower Xpert Power Quality Meters: Product FocusMike MendozaAinda não há avaliações
- Computer Architecture and Parallel Processing by Kai Hwang PDFDocumento6 páginasComputer Architecture and Parallel Processing by Kai Hwang PDFApoorva ursAinda não há avaliações
- TumblrDocumento1 páginaTumblrLumi EreAinda não há avaliações
- P091 067 UmDocumento208 páginasP091 067 UmBojan MarkovićAinda não há avaliações
- Viscous Fluid Flow Problem Set No. 3 Dr. A. Kebriaee Due Date: Sat.31 FarvardinDocumento2 páginasViscous Fluid Flow Problem Set No. 3 Dr. A. Kebriaee Due Date: Sat.31 FarvardinmohammadtariAinda não há avaliações
- Classic Petrol 35 SDocumento10 páginasClassic Petrol 35 S5432167890OOOOAinda não há avaliações
- Bearing SPM Condition Analyser BVT 111Documento2 páginasBearing SPM Condition Analyser BVT 111industrialindiaAinda não há avaliações
- IP OP DevicesDocumento9 páginasIP OP DevicesMalik Ali BiadAinda não há avaliações
- Apf188088 enDocumento130 páginasApf188088 enJavier LópezAinda não há avaliações
- Launchpad S and Mini Advanced Features GuideDocumento6 páginasLaunchpad S and Mini Advanced Features GuidealessoniaAinda não há avaliações
- Ariston Shape 10l Also Elhelyezesu Villanybojler Robbantott AbraDocumento4 páginasAriston Shape 10l Also Elhelyezesu Villanybojler Robbantott AbraSinkó AttilaAinda não há avaliações
- Mod 6Documento104 páginasMod 6Sérgio CustódioAinda não há avaliações
- LESSON 3 - Callan 6Documento17 páginasLESSON 3 - Callan 6Anh Ngữ Galaxy - Thủ Dầu MộtAinda não há avaliações
- MCQ Elex-BoylestadDocumento216 páginasMCQ Elex-BoylestadJj JumawanAinda não há avaliações
- FTM-3100R: Operating ManualDocumento36 páginasFTM-3100R: Operating ManualMarcos Chiorato100% (1)
- Simoco TSF2000Documento2 páginasSimoco TSF2000Paolo UssiAinda não há avaliações
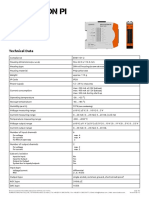
- Datasheet RevPi AIODocumento2 páginasDatasheet RevPi AIOsebadansAinda não há avaliações
- Product Handling: Complete Solutions From A Single SourceDocumento24 páginasProduct Handling: Complete Solutions From A Single Sourcemarciojunk100% (1)
- Architecture Ebook Outstanding Wood Buildings - CWCDocumento28 páginasArchitecture Ebook Outstanding Wood Buildings - CWCAc Arquitetos Associados50% (2)
- Aiwa NSX Sz80Documento32 páginasAiwa NSX Sz80panamaspace100% (3)
- Itp PWHTDocumento1 páginaItp PWHTTridib DeyAinda não há avaliações
- 03 Modern Photoelectric Effect LabDocumento3 páginas03 Modern Photoelectric Effect LabJuan David ParraAinda não há avaliações
- Design Simulation Manufacture and Testingof A Free-Piston Stirling Engine - Ivan Niell Deetlefs PDFDocumento138 páginasDesign Simulation Manufacture and Testingof A Free-Piston Stirling Engine - Ivan Niell Deetlefs PDFJorge ValianteAinda não há avaliações
- Blockchain Basics: A Non-Technical Introduction in 25 StepsNo EverandBlockchain Basics: A Non-Technical Introduction in 25 StepsNota: 4.5 de 5 estrelas4.5/5 (24)
- Grokking Algorithms: An illustrated guide for programmers and other curious peopleNo EverandGrokking Algorithms: An illustrated guide for programmers and other curious peopleNota: 4 de 5 estrelas4/5 (16)
- Optimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesNo EverandOptimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesAinda não há avaliações
- Fusion Strategy: How Real-Time Data and AI Will Power the Industrial FutureNo EverandFusion Strategy: How Real-Time Data and AI Will Power the Industrial FutureAinda não há avaliações
- SQL QuickStart Guide: The Simplified Beginner's Guide to Managing, Analyzing, and Manipulating Data With SQLNo EverandSQL QuickStart Guide: The Simplified Beginner's Guide to Managing, Analyzing, and Manipulating Data With SQLNota: 4.5 de 5 estrelas4.5/5 (46)
- The Future of Competitive Strategy: Unleashing the Power of Data and Digital Ecosystems (Management on the Cutting Edge)No EverandThe Future of Competitive Strategy: Unleashing the Power of Data and Digital Ecosystems (Management on the Cutting Edge)Nota: 5 de 5 estrelas5/5 (1)
- THE STEP BY STEP GUIDE FOR SUCCESSFUL IMPLEMENTATION OF DATA LAKE-LAKEHOUSE-DATA WAREHOUSE: "THE STEP BY STEP GUIDE FOR SUCCESSFUL IMPLEMENTATION OF DATA LAKE-LAKEHOUSE-DATA WAREHOUSE"No EverandTHE STEP BY STEP GUIDE FOR SUCCESSFUL IMPLEMENTATION OF DATA LAKE-LAKEHOUSE-DATA WAREHOUSE: "THE STEP BY STEP GUIDE FOR SUCCESSFUL IMPLEMENTATION OF DATA LAKE-LAKEHOUSE-DATA WAREHOUSE"Nota: 3 de 5 estrelas3/5 (1)
- Business Intelligence Strategy and Big Data Analytics: A General Management PerspectiveNo EverandBusiness Intelligence Strategy and Big Data Analytics: A General Management PerspectiveNota: 5 de 5 estrelas5/5 (5)
- ITIL 4 : Drive Stakeholder Value: Reference and study guideNo EverandITIL 4 : Drive Stakeholder Value: Reference and study guideAinda não há avaliações
- Oracle Database 12c Backup and Recovery Survival GuideNo EverandOracle Database 12c Backup and Recovery Survival GuideNota: 4.5 de 5 estrelas4.5/5 (3)
- Joe Celko's SQL for Smarties: Advanced SQL ProgrammingNo EverandJoe Celko's SQL for Smarties: Advanced SQL ProgrammingNota: 3 de 5 estrelas3/5 (1)
- Modelling Business Information: Entity relationship and class modelling for Business AnalystsNo EverandModelling Business Information: Entity relationship and class modelling for Business AnalystsAinda não há avaliações