Você também pode gostar
- A Method To Determine The Dynamic Load Distribution in A Chain DriveDocumento11 páginasA Method To Determine The Dynamic Load Distribution in A Chain DriveRodrigo MarinAinda não há avaliações
- Jam Jan05Documento11 páginasJam Jan05TMBryan Naufal AlfiansyahAinda não há avaliações
- Design of Tuned Mass Dampers Incorporating Wire Rope Springs: Part I: Dynamic Representation of Wire Rope SpringsDocumento9 páginasDesign of Tuned Mass Dampers Incorporating Wire Rope Springs: Part I: Dynamic Representation of Wire Rope SpringsCristina ValigiAinda não há avaliações
- Analysis With Finite Element Method of Wire Rope: TM TMDocumento4 páginasAnalysis With Finite Element Method of Wire Rope: TM TMHanifiantoAinda não há avaliações
- Analysis With Finite Element Method of Wire Rope: TM TMDocumento4 páginasAnalysis With Finite Element Method of Wire Rope: TM TMRajeuv GovindanAinda não há avaliações
- Machines 10 01052 v3Documento25 páginasMachines 10 01052 v3Karthikeyan NatarajanAinda não há avaliações
- Axial Force Between A Thick Coil and A Cylindrical Permanent Magnet: Optimising The Geometry of An Electromagnetic ActuatorDocumento11 páginasAxial Force Between A Thick Coil and A Cylindrical Permanent Magnet: Optimising The Geometry of An Electromagnetic ActuatorOscar GutierrezAinda não há avaliações
- Lateral Stiffness and Deflection Characteristics of Guide Cable With Multi-Boundary ConstraintsDocumento13 páginasLateral Stiffness and Deflection Characteristics of Guide Cable With Multi-Boundary Constraintssoheil norooziAinda não há avaliações
- Multi-Body Dynamics and Vibration AnalysisDocumento13 páginasMulti-Body Dynamics and Vibration AnalysisGogyAinda não há avaliações
- Linear-Stiffness Rotary MEMS Stage: Journal of Microelectromechanical Systems June 2012Documento4 páginasLinear-Stiffness Rotary MEMS Stage: Journal of Microelectromechanical Systems June 2012aufar syehanAinda não há avaliações
- Multi Nut Tightner at Remover (Autosaved)Documento22 páginasMulti Nut Tightner at Remover (Autosaved)Pratheep Kumar78% (9)
- Engineering Structures: Morteza Omidi, Farhad BehnamfarDocumento23 páginasEngineering Structures: Morteza Omidi, Farhad BehnamfarKenaouia BahaaAinda não há avaliações
- Dynamical Electromechanical Model For Magnetic Bearings Subject To Eddy CurrentsDocumento9 páginasDynamical Electromechanical Model For Magnetic Bearings Subject To Eddy CurrentsweishuochihAinda não há avaliações
- Finite Element Analysis of Steel CordDocumento6 páginasFinite Element Analysis of Steel CordSanjiv Kumar SinghAinda não há avaliações
- Using Winkler BeamDocumento10 páginasUsing Winkler Beamgolddust2012Ainda não há avaliações
- Computation of Mooring Chain With The Touchdown On An Inclined SeabedDocumento15 páginasComputation of Mooring Chain With The Touchdown On An Inclined SeabedMarko PerkovićAinda não há avaliações
- Magnetism - With - Coils - and - Wires - MeasurementsDocumento29 páginasMagnetism - With - Coils - and - Wires - MeasurementsBraulio IrrutiaAinda não há avaliações
- A Simplified Finite Element Model For Structural Cable Bending MechanismDocumento15 páginasA Simplified Finite Element Model For Structural Cable Bending MechanismJoaquin VieraAinda não há avaliações
- Problems of Torque and Rotation in Wire Ropes: 1. Internationaler Stuttgarter Seiltag 21. Februar 2002Documento9 páginasProblems of Torque and Rotation in Wire Ropes: 1. Internationaler Stuttgarter Seiltag 21. Februar 2002ManuelAinda não há avaliações
- Redesigning & Optimization of Conveyor PulleyDocumento6 páginasRedesigning & Optimization of Conveyor PulleyJosue21SAinda não há avaliações
- A finiteelementstudyonrailcorrugationbasedonsaturatedcreepDocumento13 páginasA finiteelementstudyonrailcorrugationbasedonsaturatedcreepRenatoAinda não há avaliações
- Molecular Dynamics Simulation Study of The Mechanical Properties of Rectangular Cu NanowiresDocumento6 páginasMolecular Dynamics Simulation Study of The Mechanical Properties of Rectangular Cu NanowiresIbrahim HasanAinda não há avaliações
- Mechanical Properties of Carbon NanotubesDocumento6 páginasMechanical Properties of Carbon NanotubesHimanshu KumarAinda não há avaliações
- Analysis of Buckling Strength of Inner WindingsDocumento5 páginasAnalysis of Buckling Strength of Inner Windingsalex696Ainda não há avaliações
- Comparison of Composite Blade Models: A Coupled-Beam Msc/Nastran Finite-Element ModelDocumento16 páginasComparison of Composite Blade Models: A Coupled-Beam Msc/Nastran Finite-Element ModelVijay NidagalkarAinda não há avaliações
- CORDE Cosserat Rod Elements For The Dynamic Simulation of One Dimensional Elastic ObjectsDocumento11 páginasCORDE Cosserat Rod Elements For The Dynamic Simulation of One Dimensional Elastic ObjectsCFAinda não há avaliações
- First Order Analysis of Plane Frames With Semi Rigid Connections - 2011Documento4 páginasFirst Order Analysis of Plane Frames With Semi Rigid Connections - 2011JuanAinda não há avaliações
- Analysing Winch Systems With Finite Element AnalysisDocumento5 páginasAnalysing Winch Systems With Finite Element AnalysisBen RuffellAinda não há avaliações
- Analysis of Cable-Stayed Bridges During Construction by Cantilever MethodsDocumento18 páginasAnalysis of Cable-Stayed Bridges During Construction by Cantilever MethodsprakharAinda não há avaliações
- Heterostructure and Quantum Well PhysicsDocumento24 páginasHeterostructure and Quantum Well PhysicshosseinAinda não há avaliações
- Transient Belt Stresses During Starting and Stopping-Elastic Response Simulated by Finite Element MethodsDocumento8 páginasTransient Belt Stresses During Starting and Stopping-Elastic Response Simulated by Finite Element MethodsGogyAinda não há avaliações
- Vibration Characteristics of A Rotor-Bearing System Caused Due To Coupling Misalignment - A ReviewDocumento10 páginasVibration Characteristics of A Rotor-Bearing System Caused Due To Coupling Misalignment - A ReviewAmirmohamad AzimiAinda não há avaliações
- Failure Analysis of Lattice Tower Like StructuresDocumento9 páginasFailure Analysis of Lattice Tower Like StructuresFrancisco Javier Torres AlvaradoAinda não há avaliações
- Modeling Cable-Driven Joint Dynamics and Friction: A Bond-Graph ApproachDocumento7 páginasModeling Cable-Driven Joint Dynamics and Friction: A Bond-Graph ApproachJyoti Arvind PathakAinda não há avaliações
- A New Deformable Catenary Element For The Analysis of Cable Net Structures - 2006Documento9 páginasA New Deformable Catenary Element For The Analysis of Cable Net Structures - 2006Truong Viet HungAinda não há avaliações
- CoRdE, Cosserat Rod Elements For The Dynamic Simulation of One-Dimensional Elastic ObjectsDocumento10 páginasCoRdE, Cosserat Rod Elements For The Dynamic Simulation of One-Dimensional Elastic Objectspezz07Ainda não há avaliações
- Frequency Study of Single-Walled Carbon Nanotubes Based On A Space-Frame Model With Flexible ConnectionsDocumento6 páginasFrequency Study of Single-Walled Carbon Nanotubes Based On A Space-Frame Model With Flexible Connectionskishorebondada78Ainda não há avaliações
- w78 2014 Paper 160Documento8 páginasw78 2014 Paper 160jacob ellyAinda não há avaliações
- Calculation of The Impedance of Rotor Cage End RingsDocumento10 páginasCalculation of The Impedance of Rotor Cage End RingsjalilemadiAinda não há avaliações
- Dynamical Electromechanical Model For Magnetic BearingsDocumento6 páginasDynamical Electromechanical Model For Magnetic BearingsweishuochihAinda não há avaliações
- 6 Transient AnalysisDocumento4 páginas6 Transient AnalysisRbKahnAinda não há avaliações
- 1 s2.0 S1474667017594719 MainDocumento9 páginas1 s2.0 S1474667017594719 MainOussama AkrmiAinda não há avaliações
- Elastodynamic Analysis of Low Tension Cables Using A New Curved Beam ElementDocumento15 páginasElastodynamic Analysis of Low Tension Cables Using A New Curved Beam ElementSamiullahAinda não há avaliações
- Ijnm AogDocumento21 páginasIjnm Aogvincenzo.gattulliAinda não há avaliações
- 1 s2.0 S0141029615007300 Main PDFDocumento9 páginas1 s2.0 S0141029615007300 Main PDFJithinRajAinda não há avaliações
- This Paper Was Presented at The ASCE/SEI Conference "Electrical Transmission in A New Age" in Omaha, Nebraska On September 9, 2002Documento8 páginasThis Paper Was Presented at The ASCE/SEI Conference "Electrical Transmission in A New Age" in Omaha, Nebraska On September 9, 2002Ky TaAinda não há avaliações
- Assessment of Cable Models For Synthetic Mooring LinesDocumento8 páginasAssessment of Cable Models For Synthetic Mooring LinesantonioAinda não há avaliações
- Modal Analysis of Compressor CrankshaftDocumento5 páginasModal Analysis of Compressor CrankshaftDominicAinda não há avaliações
- Index: History Chain Drive Design Chain Failures and Analysis Conclusion ReferenceDocumento8 páginasIndex: History Chain Drive Design Chain Failures and Analysis Conclusion ReferenceGaganpreetSinghGindraAinda não há avaliações
- Machines 10 00664Documento16 páginasMachines 10 00664luuthuanAinda não há avaliações
- 08 2009 151 Wong 04 PDFDocumento9 páginas08 2009 151 Wong 04 PDFBharath ReddyAinda não há avaliações
- Analtysis of Knuckle JointDocumento8 páginasAnaltysis of Knuckle JointdhawallaAinda não há avaliações
- Si 7 PDFDocumento4 páginasSi 7 PDFMohamed Jamal AmanullahAinda não há avaliações
- Heterostructure and Quantum Well PhysicsDocumento28 páginasHeterostructure and Quantum Well PhysicsLain CoubertAinda não há avaliações
- In IsDocumento17 páginasIn IsHùng NguyễnAinda não há avaliações
- International Journal of Solids and Structures: Weiguo Wu, Xin CaoDocumento9 páginasInternational Journal of Solids and Structures: Weiguo Wu, Xin CaoNilma Rosa Barsallo PachecoAinda não há avaliações
- Mechanical Force TransducersDocumento8 páginasMechanical Force TransducersHamit AydınAinda não há avaliações
- Analysis of The Power Transmission Characteristics of A Metal V-Belt Type CVTDocumento8 páginasAnalysis of The Power Transmission Characteristics of A Metal V-Belt Type CVTReza FbriadiAinda não há avaliações
- A Numerical Study On Dynamic Characteristics of A CatenaryDocumento10 páginasA Numerical Study On Dynamic Characteristics of A Catenarydion2110Ainda não há avaliações
- Matrix Methods of Structural Analysis: Pergamon International Library of Science, Technology, Engineering and Social StudiesNo EverandMatrix Methods of Structural Analysis: Pergamon International Library of Science, Technology, Engineering and Social StudiesNota: 4.5 de 5 estrelas4.5/5 (3)
- Engineering Solid MechanicsDocumento286 páginasEngineering Solid MechanicsRodrigo MarinAinda não há avaliações
- Vibrations in Roller Chain DrivesDocumento8 páginasVibrations in Roller Chain DrivesRodrigo MarinAinda não há avaliações
- Mechanics of Orthogonal Machining - Palmer and Oxley 1959Documento34 páginasMechanics of Orthogonal Machining - Palmer and Oxley 1959Rodrigo Marin100% (1)
- Fatigue Crack Propagation in Steels of Various Yield StrengthsDocumento7 páginasFatigue Crack Propagation in Steels of Various Yield StrengthsRodrigo Marin100% (1)
- Differential Model and Impact Response of A Flexible Beam Attached To A Rigid Supporting StructureDocumento73 páginasDifferential Model and Impact Response of A Flexible Beam Attached To A Rigid Supporting StructureRodrigo MarinAinda não há avaliações
- Finite Element Modeling and Analysis of Drive ChainDocumento99 páginasFinite Element Modeling and Analysis of Drive ChainRodrigo MarinAinda não há avaliações
- Simulation and Analysis of Roller Chain Drive SystemsDocumento191 páginasSimulation and Analysis of Roller Chain Drive SystemsRodrigo MarinAinda não há avaliações
- Solid MechanicsDocumento342 páginasSolid MechanicsRodrigo MarinAinda não há avaliações
- Failure Analysis of Conveyor Chain Links: A Case Study at Top Glove Sdn. Bhd.Documento40 páginasFailure Analysis of Conveyor Chain Links: A Case Study at Top Glove Sdn. Bhd.Rodrigo MarinAinda não há avaliações
- Model of Contact Between Rollers and Sprockets in Chain-Drive SystemsDocumento20 páginasModel of Contact Between Rollers and Sprockets in Chain-Drive SystemsRodrigo MarinAinda não há avaliações
- Analysis of Non-Uniform Beam Under Bending Due To Inertia Impact LoadingDocumento10 páginasAnalysis of Non-Uniform Beam Under Bending Due To Inertia Impact LoadingRodrigo MarinAinda não há avaliações
- Wear and Fatigue Analysis of Two Wheeler Transmission ChainDocumento7 páginasWear and Fatigue Analysis of Two Wheeler Transmission ChainRodrigo MarinAinda não há avaliações
- Kinematics and Dynamics of Roller Chain DrivesDocumento200 páginasKinematics and Dynamics of Roller Chain DrivesRodrigo Marin100% (1)
- A Roller Chain Drive Model Including Contact With Guide-BarsDocumento17 páginasA Roller Chain Drive Model Including Contact With Guide-BarsRodrigo MarinAinda não há avaliações
- Failure Analysis of Carrier Chain PinsDocumento8 páginasFailure Analysis of Carrier Chain PinsRodrigo MarinAinda não há avaliações
- Converting Dynamic Impact Events To Equivalent Static Loads in Vehicle ChassisDocumento62 páginasConverting Dynamic Impact Events To Equivalent Static Loads in Vehicle ChassisRm1262Ainda não há avaliações
- Transient Response of An Impacted Beam and Indirect Impact Force Identification Using Strain MeasurementsDocumento13 páginasTransient Response of An Impacted Beam and Indirect Impact Force Identification Using Strain MeasurementsRodrigo MarinAinda não há avaliações
- Dynamic Impact Factors For Shear and Bending Moment of Simply Supported and Continuous Concrete Girder BridgesDocumento9 páginasDynamic Impact Factors For Shear and Bending Moment of Simply Supported and Continuous Concrete Girder BridgesRodrigo MarinAinda não há avaliações
- Failure Maps of Clamped Beams Under Impulsive LoadingDocumento22 páginasFailure Maps of Clamped Beams Under Impulsive LoadingRodrigo MarinAinda não há avaliações
- Kinematic and Dynamic Modeling and Approximate Analysis of A Roller Chain Drive 2016 Journal of Sound and VibrationDocumento24 páginasKinematic and Dynamic Modeling and Approximate Analysis of A Roller Chain Drive 2016 Journal of Sound and VibrationRodrigo MarinAinda não há avaliações
- Dynamic Structural Analysis of BeamsDocumento233 páginasDynamic Structural Analysis of BeamsRodrigo MarinAinda não há avaliações
- An Analysis of The Shear Failure of Rigid-Linear Hardening Beams Under Impulsive LoadingDocumento11 páginasAn Analysis of The Shear Failure of Rigid-Linear Hardening Beams Under Impulsive LoadingRodrigo MarinAinda não há avaliações
- Experimental and Numerical Study On The Impact Strength of Beams and PlatesDocumento94 páginasExperimental and Numerical Study On The Impact Strength of Beams and PlatesRodrigo MarinAinda não há avaliações
- Impact Response Based On Timoshenko Beam TheoryDocumento154 páginasImpact Response Based On Timoshenko Beam TheoryRodrigo MarinAinda não há avaliações
- A Study of Corrosion Fatigue Crack Propagation of 403 Stainless Steel in Aqueous EnvironmentsDocumento210 páginasA Study of Corrosion Fatigue Crack Propagation of 403 Stainless Steel in Aqueous EnvironmentsRodrigo MarinAinda não há avaliações
- Fatigue Crack Growth in Laser Shock Peened Aerofoils Subjected To Foreign Object DamageDocumento157 páginasFatigue Crack Growth in Laser Shock Peened Aerofoils Subjected To Foreign Object DamageRodrigo Marin100% (1)
- Stress Analysis of Cracks Handbook Appendices PDFDocumento191 páginasStress Analysis of Cracks Handbook Appendices PDFRodrigo MarinAinda não há avaliações
- Vibration of Axial Turbomachinery Blades: Measurementand Fluid-Structure InteractionsDocumento227 páginasVibration of Axial Turbomachinery Blades: Measurementand Fluid-Structure InteractionsRodrigo MarinAinda não há avaliações
- Hawking-Brief History of TimeDocumento336 páginasHawking-Brief History of TimeAlbert Kristian0% (1)
- How Dna Controls The Workings of The CellDocumento2 páginasHow Dna Controls The Workings of The Cellapi-238397369Ainda não há avaliações
- GX-2009 - Personal Multigas Detector. Operator's Manual (RKI, 2009)Documento64 páginasGX-2009 - Personal Multigas Detector. Operator's Manual (RKI, 2009)Stasio80Ainda não há avaliações
- Astm A6 A6m-08Documento62 páginasAstm A6 A6m-08Vũ Nhân HòaAinda não há avaliações
- FM Chapter2Documento3 páginasFM Chapter2Drkumar SwamyAinda não há avaliações
- GAS-INSULATED SWITCHGEAR MODELS 72kV ADVANCED ENVIRONMENTALLY FRIENDLYDocumento6 páginasGAS-INSULATED SWITCHGEAR MODELS 72kV ADVANCED ENVIRONMENTALLY FRIENDLYBudi SantonyAinda não há avaliações
- 3BSE079234 - en 800xa 6.0 ReleasedDocumento7 páginas3BSE079234 - en 800xa 6.0 ReleasedFormat_CAinda não há avaliações
- PTP - Level MethodsDocumento23 páginasPTP - Level Methodssasikiran mAinda não há avaliações
- Huawei Mediapad m5 10.8inch Ръководство За Потребителя (Cmr-Al09, 01, Neu)Documento6 páginasHuawei Mediapad m5 10.8inch Ръководство За Потребителя (Cmr-Al09, 01, Neu)Галина ЦеноваAinda não há avaliações
- Satellite TestingDocumento30 páginasSatellite TestingXavier Ponce Ferrufino100% (1)
- 10th Term Exams Computer Science PaperDocumento2 páginas10th Term Exams Computer Science PaperMohammad Tariq JavaidAinda não há avaliações
- ASTM D 1510 - 02 Carbon Black-Iodine Adsorption NumberDocumento7 páginasASTM D 1510 - 02 Carbon Black-Iodine Adsorption Numberalin2005100% (1)
- Verify scope acceptance of project deliverablesDocumento5 páginasVerify scope acceptance of project deliverablesmypmpbooksAinda não há avaliações
- Rso PDFDocumento120 páginasRso PDFjohn shepardAinda não há avaliações
- Max Born, Albert Einstein-The Born-Einstein Letters-Macmillan (1971)Documento132 páginasMax Born, Albert Einstein-The Born-Einstein Letters-Macmillan (1971)Brian O'SullivanAinda não há avaliações
- Enzyme Inhibition and ToxicityDocumento12 páginasEnzyme Inhibition and ToxicityDaniel OmolewaAinda não há avaliações
- HowTo Work With CR 90Documento87 páginasHowTo Work With CR 90WagBezerraAinda não há avaliações
- Java10 PDFDocumento137 páginasJava10 PDFswarup sarkarAinda não há avaliações
- Cantors Paradox PDFDocumento16 páginasCantors Paradox PDFColectivo Utopía MoreliaAinda não há avaliações
- Nord Factory Restore Instructions Edition CDocumento1 páginaNord Factory Restore Instructions Edition CTonino CannavacciuoloAinda não há avaliações
- Pub - The Physics of The Standard Model and Beyond PDFDocumento314 páginasPub - The Physics of The Standard Model and Beyond PDFEduardo Gareca100% (2)
- c1Documento19 páginasc1vgnagaAinda não há avaliações
- Silo Cement CalculationDocumento11 páginasSilo Cement CalculationFikriaraz AfifAinda não há avaliações
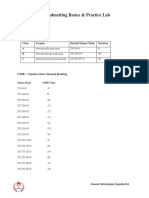
- SubNetting Practice LabDocumento3 páginasSubNetting Practice LabOdoch HerbertAinda não há avaliações
- Lecture 1: Encoding Language: LING 1330/2330: Introduction To Computational Linguistics Na-Rae HanDocumento18 páginasLecture 1: Encoding Language: LING 1330/2330: Introduction To Computational Linguistics Na-Rae HanLaura AmwayiAinda não há avaliações
- Climate Change: The Fork at The End of NowDocumento28 páginasClimate Change: The Fork at The End of NowMomentum Press100% (1)
- Geophysical Report Megnatic SurveyDocumento29 páginasGeophysical Report Megnatic SurveyShahzad KhanAinda não há avaliações
- PDF Solution Manual For Gas Turbine Theory 6th Edition Saravanamuttoo Rogers CompressDocumento7 páginasPDF Solution Manual For Gas Turbine Theory 6th Edition Saravanamuttoo Rogers CompressErickson Brayner MarBerAinda não há avaliações
- RMA 3000 Remote Meter Assemblies Specifications: 34-ST-03-81, July 2017Documento8 páginasRMA 3000 Remote Meter Assemblies Specifications: 34-ST-03-81, July 2017Amir LopezAinda não há avaliações
- 2017 Yr 9 Linear Relations Test A SolutionsDocumento13 páginas2017 Yr 9 Linear Relations Test A SolutionsSam JeffreyAinda não há avaliações