Você também pode gostar
- José Rene Castillo Cisneros You Are the Help Until Help Arrives _ Certificate SurveyDocumento1 páginaJosé Rene Castillo Cisneros You Are the Help Until Help Arrives _ Certificate SurveypcmundotAinda não há avaliações
- 250-tijuanaDocumento1 página250-tijuanapcmundotAinda não há avaliações
- Bureau of Security and Investigative Services: Department of Consumer AffairsDocumento17 páginasBureau of Security and Investigative Services: Department of Consumer AffairspcmundotAinda não há avaliações
- Heart Dysrhythmias Cheat Sheet ExplainedDocumento5 páginasHeart Dysrhythmias Cheat Sheet ExplainedpcmundotAinda não há avaliações
- 01ICS100b Visuals Aug2010Documento9 páginas01ICS100b Visuals Aug2010juliheroAinda não há avaliações
- CA Baton Training Manual Outlines Legal Use of ForceDocumento20 páginasCA Baton Training Manual Outlines Legal Use of Forcephilpedro100% (1)
- 20130SB66992CHPDocumento6 páginas20130SB66992CHPpcmundotAinda não há avaliações
- IV Cheatsheet Bgnocolor PDFDocumento2 páginasIV Cheatsheet Bgnocolor PDFHermiie Joii Galang MaglaquiiAinda não há avaliações
- In-Depth BBP A 09-14-11Documento48 páginasIn-Depth BBP A 09-14-11pcmundotAinda não há avaliações
- Power LOAD SpecSheet MktLit1243RevA2Documento1 páginaPower LOAD SpecSheet MktLit1243RevA2pcmundotAinda não há avaliações
- Acute Stroke CEDocumento2 páginasAcute Stroke CEpcmundotAinda não há avaliações
- Acute Stroke One Page-2Documento1 páginaAcute Stroke One Page-2pcmundotAinda não há avaliações
- Citizen Corps Council Registration TutorialDocumento16 páginasCitizen Corps Council Registration TutorialpcmundotAinda não há avaliações
- Hazard2 Fire Slides Jan2011Documento13 páginasHazard2 Fire Slides Jan2011pcmundotAinda não há avaliações
- Acute Stroke One Page-2Documento1 páginaAcute Stroke One Page-2pcmundotAinda não há avaliações
- Cert Drill 1Documento32 páginasCert Drill 1pcmundotAinda não há avaliações
- Enrollment Agreement: National UniversityDocumento2 páginasEnrollment Agreement: National UniversitypcmundotAinda não há avaliações
- Hazard1 Earthquakes Slides - Jan2011 PDFDocumento10 páginasHazard1 Earthquakes Slides - Jan2011 PDFpcmundotAinda não há avaliações
- Cert Drill 3-2Documento28 páginasCert Drill 3-2pcmundotAinda não há avaliações
- Citizen Corps Council Admin GuideDocumento15 páginasCitizen Corps Council Admin GuidepcmundotAinda não há avaliações
- Citizen Corps Council Registration TutorialDocumento16 páginasCitizen Corps Council Registration TutorialpcmundotAinda não há avaliações
- Hazard1 Earthquakes Slides Jan2011Documento10 páginasHazard1 Earthquakes Slides Jan2011pcmundotAinda não há avaliações
- Council Registion QuestionsDocumento18 páginasCouncil Registion QuestionspcmundotAinda não há avaliações
- California CERT FOG 2014Documento84 páginasCalifornia CERT FOG 2014pcmundotAinda não há avaliações
- TTT Participant Manual 101316 CH 508Documento183 páginasTTT Participant Manual 101316 CH 508pcmundotAinda não há avaliações
- California CERT Field Operations Guide 2014Documento84 páginasCalifornia CERT Field Operations Guide 2014pcmundotAinda não há avaliações
- CribbingDocumento1 páginaCribbingpcmundotAinda não há avaliações
- FEMA Emergency Response Plan 0Documento10 páginasFEMA Emergency Response Plan 0Adam WardAinda não há avaliações
- CERT Radio Communications Plan ManualDocumento15 páginasCERT Radio Communications Plan Manualbuckley1212085Ainda não há avaliações
- Emergency Response ResourcesDocumento2 páginasEmergency Response ResourcesGerald LimAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- TF100-109C 64501 - Bypass - Valve PDFDocumento4 páginasTF100-109C 64501 - Bypass - Valve PDFtiualbert8729Ainda não há avaliações
- Lab 7 Laminar & Turbular FlowDocumento16 páginasLab 7 Laminar & Turbular FlowLandel SmithAinda não há avaliações
- Lockheed Martin Santa Cruz Facility: Ordnance System Design, Manufacture and TestDocumento6 páginasLockheed Martin Santa Cruz Facility: Ordnance System Design, Manufacture and Testrolf_br100% (1)
- RJOO - OSAKA AirchartsDocumento46 páginasRJOO - OSAKA AirchartsVictorAinda não há avaliações
- EHAMSBGRDocumento112 páginasEHAMSBGRDiego GomesAinda não há avaliações
- Metel Drilling - Irwin PDFDocumento20 páginasMetel Drilling - Irwin PDFArun SasiAinda não há avaliações
- Rac AssignmentDocumento21 páginasRac AssignmentJagdeep SinghAinda não há avaliações
- PTWDocumento31 páginasPTWueberschallAinda não há avaliações
- Critical Cleaning Handbook 2nd EditionDocumento2 páginasCritical Cleaning Handbook 2nd EditionukalAinda não há avaliações
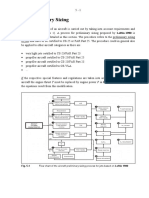
- 5 Preliminary Sizing: Flow Chart of The Aircraft Preliminary Sizing Process For Jets Based On Loftin 1980Documento32 páginas5 Preliminary Sizing: Flow Chart of The Aircraft Preliminary Sizing Process For Jets Based On Loftin 1980althafalthafAinda não há avaliações
- RLM02Documento6 páginasRLM02Muaz100% (1)
- The Breguet XIVs of The Army of Central Lithuania (Small Air Force Observer (149) )Documento7 páginasThe Breguet XIVs of The Army of Central Lithuania (Small Air Force Observer (149) )StingAinda não há avaliações
- Axial CompresserDocumento48 páginasAxial Compresservishnu kadiyalaAinda não há avaliações
- 1 - Cowling&EBU (CF6-80E1)Documento9 páginas1 - Cowling&EBU (CF6-80E1)Chabou_r1627100% (3)
- Federal Aviation Administration, DOT 135.351: 135.349 Flight Attendants: Initial and Transition Ground TrainingDocumento2 páginasFederal Aviation Administration, DOT 135.351: 135.349 Flight Attendants: Initial and Transition Ground TrainingmollyAinda não há avaliações
- Kerja Praktek PT Di: Disusun Oleh: Baga Philips SinagaDocumento23 páginasKerja Praktek PT Di: Disusun Oleh: Baga Philips SinagaBaga ArtAinda não há avaliações
- Doubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsDocumento6 páginasDoubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsArun RajendranAinda não há avaliações
- Airframe and Systems CopieeeeDocumento126 páginasAirframe and Systems Copieeeepaul100% (1)
- Apollo 7 PAO Commentary TranscriptDocumento1.158 páginasApollo 7 PAO Commentary TranscriptBob AndrepontAinda não há avaliações
- Cube SatDocumento6 páginasCube SatKritesh ShahAinda não há avaliações
- Components of Jet Engines - WikipediaDocumento1 páginaComponents of Jet Engines - WikipediaPacy MugishoAinda não há avaliações
- Cruise Missile GuideDocumento34 páginasCruise Missile Guideshubham soniAinda não há avaliações
- LHD 241 CameDocumento17 páginasLHD 241 CameManisha Yuuki100% (1)
- Part B - B777 & A330 - EnglishDocumento188 páginasPart B - B777 & A330 - Englishapi-3705891100% (1)
- Report Flight Dynamic (Mirza) PDFDocumento51 páginasReport Flight Dynamic (Mirza) PDFAmirinAinda não há avaliações
- Pushover Analysis SACSDocumento12 páginasPushover Analysis SACSIshwarya SrikanthAinda não há avaliações
- sm630 Finger Print Module Specification - Numitech SolutionsDocumento5 páginassm630 Finger Print Module Specification - Numitech SolutionsChinni PravallikaAinda não há avaliações
- 208BIMCUS-00 Pilot ManualDocumento744 páginas208BIMCUS-00 Pilot ManualRuth Elena Quintero Gamboa100% (2)
- CameronDocumento4 páginasCameronhermon_agustio0% (1)
- V SpeedsDocumento4 páginasV Speedslacsmm982Ainda não há avaliações