Você também pode gostar
- Single Col - Tank-2013Documento35 páginasSingle Col - Tank-2013Hgagselim SelimAinda não há avaliações
- ASHRAE Fundamentals 2005 - SI Units - Extract of Tables PDFDocumento40 páginasASHRAE Fundamentals 2005 - SI Units - Extract of Tables PDFSufian SarwarAinda não há avaliações
- Chapter 3Documento5 páginasChapter 3Ngozi OddiriAinda não há avaliações
- Lecture 4 Fourier OpticsDocumento14 páginasLecture 4 Fourier OpticsCazimir BostanAinda não há avaliações
- Nilpotent Bases For A Class of Nonintegrable Distributions With Applications To Trajectory Generation For Nonholonomic SystemsDocumento18 páginasNilpotent Bases For A Class of Nonintegrable Distributions With Applications To Trajectory Generation For Nonholonomic SystemsAmino fileAinda não há avaliações
- Asian Journal of Civil Engineering (Building and Housing) Vol. 8Documento16 páginasAsian Journal of Civil Engineering (Building and Housing) Vol. 8muhammadyf100% (2)
- Linear Feedback ControlDocumento14 páginasLinear Feedback ControlHung TuanAinda não há avaliações
- Two Way Coupled Structural Acoustic OptiDocumento16 páginasTwo Way Coupled Structural Acoustic OptiSefa KayaAinda não há avaliações
- Application of Classical and Operational Modal Analysis For Examination of Engineering StructuresDocumento6 páginasApplication of Classical and Operational Modal Analysis For Examination of Engineering StructuresShariq Hassan AwanAinda não há avaliações
- DETC2017-67126: On The Adrc of Non-Differentially Flat, Underactuated, Nonlinear Systems: An Experimental Case StudyDocumento8 páginasDETC2017-67126: On The Adrc of Non-Differentially Flat, Underactuated, Nonlinear Systems: An Experimental Case StudyEfrain HernándezAinda não há avaliações
- Mojabi PHD Thesis Algorithms Techniques For Microwave TomographyDocumento265 páginasMojabi PHD Thesis Algorithms Techniques For Microwave Tomographyasrar asimAinda não há avaliações
- Citation Linear Parameter-Varying System Identification of An Industrial Ball Screw SetupDocumento7 páginasCitation Linear Parameter-Varying System Identification of An Industrial Ball Screw SetupJessica JaraAinda não há avaliações
- F95 OpenMPv1 v2Documento21 páginasF95 OpenMPv1 v2Abdullah IlyasAinda não há avaliações
- Study On Dynamics of Saponification Process Using State Space ModelDocumento6 páginasStudy On Dynamics of Saponification Process Using State Space ModelG'nesiis AndreiitapAinda não há avaliações
- Paper Akak - SI2011 16 - 18 Nov ProceedingDocumento10 páginasPaper Akak - SI2011 16 - 18 Nov ProceedingZainuri NorliyatiAinda não há avaliações
- On-Line Modal Monitoring of Aircraft Structures Under Unknown Excitation SDocumento15 páginasOn-Line Modal Monitoring of Aircraft Structures Under Unknown Excitation SLida H CaballeroAinda não há avaliações
- Long-Term Prediction of Time Series Using State-Space ModelsDocumento11 páginasLong-Term Prediction of Time Series Using State-Space ModelsMurilo CamargosAinda não há avaliações
- Determination of Modal Residues and Residual Flexibility For Time-Domain System RealizationDocumento31 páginasDetermination of Modal Residues and Residual Flexibility For Time-Domain System RealizationSamagassi SouleymaneAinda não há avaliações
- Af 65Documento10 páginasAf 65he maAinda não há avaliações
- Nonlinear Programming Based Sliding Mode Control of An Inverted PendulumDocumento5 páginasNonlinear Programming Based Sliding Mode Control of An Inverted Pendulumvirus101Ainda não há avaliações
- Dynamical Analysis of Transmission Line Cables. Part 1 - Linear TheoryDocumento11 páginasDynamical Analysis of Transmission Line Cables. Part 1 - Linear TheoryMansour AlkmimAinda não há avaliações
- Application of Machine Learning Algorithms To Flow Modeling and OptimizationDocumento10 páginasApplication of Machine Learning Algorithms To Flow Modeling and OptimizationDanielAinda não há avaliações
- 小论文 - Modeling of flexible non-linear dynamic links in Nano-Positioning Motion SystemsDocumento10 páginas小论文 - Modeling of flexible non-linear dynamic links in Nano-Positioning Motion Systems侯涛Ainda não há avaliações
- Local Dynamic Modeling With Self-Organizing Maps and Applications To Nonlinear System Identification and ControlDocumento19 páginasLocal Dynamic Modeling With Self-Organizing Maps and Applications To Nonlinear System Identification and ControlzhaobingAinda não há avaliações
- Generalized Averaging Method For Power Conversion Circuits: Seth R. Sanders, Z. Liu, and George C - VergheseDocumento9 páginasGeneralized Averaging Method For Power Conversion Circuits: Seth R. Sanders, Z. Liu, and George C - VergheseLazaro S. EscalanteAinda não há avaliações
- Logistic Map Circuit PDFDocumento8 páginasLogistic Map Circuit PDFmenguemengueAinda não há avaliações
- Global Convergence of A Trust-Region Sqp-Filter Algorithm For General Nonlinear ProgrammingDocumento25 páginasGlobal Convergence of A Trust-Region Sqp-Filter Algorithm For General Nonlinear ProgrammingAndressa PereiraAinda não há avaliações
- RBF BP JieeecDocumento5 páginasRBF BP JieeecEyad A. FeilatAinda não há avaliações
- Sandeep Bhatt Et Al - Tree Codes For Vortex Dynamics: Application of A Programming FrameworkDocumento11 páginasSandeep Bhatt Et Al - Tree Codes For Vortex Dynamics: Application of A Programming FrameworkVing666789Ainda não há avaliações
- Control Law Design For Switched Repetitive Processes With A Metal Rolling ExampleDocumento6 páginasControl Law Design For Switched Repetitive Processes With A Metal Rolling ExampleGhaltagh MMMAinda não há avaliações
- Peer Review CommentsDocumento10 páginasPeer Review CommentsDavid StamenovAinda não há avaliações
- Doyle 1978Documento2 páginasDoyle 1978mayankgarg333Ainda não há avaliações
- EllisseDocumento8 páginasEllissenavarromerdaAinda não há avaliações
- Aerodynamic Analysis Involving Moving Parts With XFlowDocumento12 páginasAerodynamic Analysis Involving Moving Parts With XFlowDmitry GrenishenAinda não há avaliações
- New Investigations On The Method of Characteristics For The Evaluation of Line TransientsDocumento6 páginasNew Investigations On The Method of Characteristics For The Evaluation of Line TransientsAndersonAinda não há avaliações
- Modeling of The State Transition Equations of Power Systems With Non-Continuously Operating Elements by The RCF MethodDocumento6 páginasModeling of The State Transition Equations of Power Systems With Non-Continuously Operating Elements by The RCF Methodkanda71Ainda não há avaliações
- A Hamiltonian Approach For The Optimal Control of The Switching Signal For A DC-DC ConverterDocumento7 páginasA Hamiltonian Approach For The Optimal Control of The Switching Signal For A DC-DC ConverterSriharsha SanthapurAinda não há avaliações
- Multivariate AR Model Order Estimation With Unknown Process Order As Published in SpringerDocumento11 páginasMultivariate AR Model Order Estimation With Unknown Process Order As Published in SpringerΣΤΥΛΙΑΝΟΣ ΠΑΠΠΑΣAinda não há avaliações
- EasyChair Preprint 1660Documento9 páginasEasyChair Preprint 1660HendraMasvikaAinda não há avaliações
- Flutter Prediction Using Reduced-Order ModelingDocumento16 páginasFlutter Prediction Using Reduced-Order ModelingTheAinda não há avaliações
- Interpretability of Hinging HyperplanesDocumento25 páginasInterpretability of Hinging HyperplanesFabricio CostaAinda não há avaliações
- Meshless - Science DirectDocumento13 páginasMeshless - Science Directenatt2012Ainda não há avaliações
- A Novel Numerical Algorithm Based On Galerkin-Petrov Time-Discretization Method For Solving Chaotic Nonlinear Dynamical SystemsDocumento15 páginasA Novel Numerical Algorithm Based On Galerkin-Petrov Time-Discretization Method For Solving Chaotic Nonlinear Dynamical SystemsMuhammad Sabeel KhanAinda não há avaliações
- 140 CoronadoDocumento7 páginas140 CoronadoUplander DodyAinda não há avaliações
- Computer Solution: Digital Electromagnetic Transients Multiphase NetworksDocumento12 páginasComputer Solution: Digital Electromagnetic Transients Multiphase NetworksObed GarcíaAinda não há avaliações
- Domme 1967Documento12 páginasDomme 1967Carlos ChávezAinda não há avaliações
- 58 MelnikovDocumento13 páginas58 MelnikovMayurAinda não há avaliações
- CSTR LMPC Vs NMPCDocumento6 páginasCSTR LMPC Vs NMPCgverma9461Ainda não há avaliações
- Simulation and Control Design of An Uniaxial Magnetic Levitation SystemDocumento6 páginasSimulation and Control Design of An Uniaxial Magnetic Levitation SystemElmer Mamani PretelAinda não há avaliações
- International Conference NeruDocumento10 páginasInternational Conference NeruNeeru SinghAinda não há avaliações
- General Analysis of Multi-Phase Systems Based On Space Vector ApproachDocumento7 páginasGeneral Analysis of Multi-Phase Systems Based On Space Vector Approachni60Ainda não há avaliações
- V2 - Data - Driven - Modeling - of - Hydrodynamic - Loading - Using - NARX - and - Harmonic - ProbingDocumento10 páginasV2 - Data - Driven - Modeling - of - Hydrodynamic - Loading - Using - NARX - and - Harmonic - ProbingDavid StamenovAinda não há avaliações
- Kalman Filter and Surveying ApplicationsDocumento30 páginasKalman Filter and Surveying ApplicationskateborghiAinda não há avaliações
- V3 - Data - Driven - Modeling - of - Hydrodynamic - Loading - Using - NARX - and - Harmonic - ProbingDocumento10 páginasV3 - Data - Driven - Modeling - of - Hydrodynamic - Loading - Using - NARX - and - Harmonic - ProbingDavid StamenovAinda não há avaliações
- Dieu Khien He Thong Bi Trong Tu TruongDocumento5 páginasDieu Khien He Thong Bi Trong Tu TruongNinhĐứcThànhAinda não há avaliações
- Proper Orthogonal DecompositionDocumento10 páginasProper Orthogonal DecompositionKenry Xu ChiAinda não há avaliações
- Automated Classification of Power Quality Disturbances Using SVM and RBF NetworksDocumento7 páginasAutomated Classification of Power Quality Disturbances Using SVM and RBF NetworksbajricaAinda não há avaliações
- Square Root SAM: Frank Dellaert College of Computing Georgia Institute of TechnologyDocumento8 páginasSquare Root SAM: Frank Dellaert College of Computing Georgia Institute of TechnologyAbhinavAinda não há avaliações
- Cho-1994-The Construction of Double-Ended Classical TrajectoriesDocumento12 páginasCho-1994-The Construction of Double-Ended Classical TrajectoriesISAinda não há avaliações
- Generator Excitation Control Using Local Model Networks: Et Al.Documento29 páginasGenerator Excitation Control Using Local Model Networks: Et Al.Phil WhitemanAinda não há avaliações
- Sliding Mode Control For Linear Uncertain Switched Systems: N M×N N TDocumento5 páginasSliding Mode Control For Linear Uncertain Switched Systems: N M×N N TWaj DIAinda não há avaliações
- Difference Equations in Normed Spaces: Stability and OscillationsNo EverandDifference Equations in Normed Spaces: Stability and OscillationsAinda não há avaliações
- Factorization of Boundary Value Problems Using the Invariant Embedding MethodNo EverandFactorization of Boundary Value Problems Using the Invariant Embedding MethodAinda não há avaliações
- Nonlinear Control Feedback Linearization Sliding Mode ControlNo EverandNonlinear Control Feedback Linearization Sliding Mode ControlAinda não há avaliações
- Supercap Leveler PDFDocumento11 páginasSupercap Leveler PDFCazimir BostanAinda não há avaliações
- bq30z50/55 Advanced Gas Gauge Circuit Design: Application ReportDocumento16 páginasbq30z50/55 Advanced Gas Gauge Circuit Design: Application ReportCazimir BostanAinda não há avaliações
- Active Balancing Circuit For Advanced Lithium-IonDocumento7 páginasActive Balancing Circuit For Advanced Lithium-IonCazimir BostanAinda não há avaliações
- Guide On Supercapacitor Leakage Current Behavior in EH ApplicationsDocumento4 páginasGuide On Supercapacitor Leakage Current Behavior in EH ApplicationsCazimir BostanAinda não há avaliações
- How To Test Super CapacitorsDocumento8 páginasHow To Test Super CapacitorsCazimir BostanAinda não há avaliações
- Coek - Info - Performance Testing of Supercapacitors Important IDocumento14 páginasCoek - Info - Performance Testing of Supercapacitors Important ICazimir BostanAinda não há avaliações
- A Generic FDTD Form For Maxwell EquationsDocumento24 páginasA Generic FDTD Form For Maxwell EquationsCazimir BostanAinda não há avaliações
- Digital-Analog Quantum Computation: Mikel - Sanz@ehu - EsDocumento12 páginasDigital-Analog Quantum Computation: Mikel - Sanz@ehu - EsCazimir BostanAinda não há avaliações
- Machine Learning and The Physical Sciences: Giuseppe CarleoDocumento47 páginasMachine Learning and The Physical Sciences: Giuseppe CarleoCazimir BostanAinda não há avaliações
- CoFT EC FDTD RenningsDocumento20 páginasCoFT EC FDTD RenningsCazimir BostanAinda não há avaliações
- A Model For Avalanche Breakdown Calculation in Low-Voltage Trench Power MOSFET DevicesDocumento7 páginasA Model For Avalanche Breakdown Calculation in Low-Voltage Trench Power MOSFET DevicesCazimir BostanAinda não há avaliações
- Trench Angle: A Key Design Factor For A Deep Trench Superjunction MOSFETDocumento6 páginasTrench Angle: A Key Design Factor For A Deep Trench Superjunction MOSFETCazimir BostanAinda não há avaliações
- NMiP Coupled ModesDocumento29 páginasNMiP Coupled ModesCazimir BostanAinda não há avaliações
- DC Characteristics of A MOS Transistor (MOSFET) : Created in COMSOL Multiphysics 5.4Documento22 páginasDC Characteristics of A MOS Transistor (MOSFET) : Created in COMSOL Multiphysics 5.4Cazimir BostanAinda não há avaliações
- Quantum Computational Chemistry: Sam Mcardle, Suguru Endo, Al An Aspuru-Guzik, Simon C. Benjamin, and Xiao YuanDocumento59 páginasQuantum Computational Chemistry: Sam Mcardle, Suguru Endo, Al An Aspuru-Guzik, Simon C. Benjamin, and Xiao YuanCazimir BostanAinda não há avaliações
- Establishing The Quantum Supremacy Frontier With A 281 Pflop/s SimulationDocumento14 páginasEstablishing The Quantum Supremacy Frontier With A 281 Pflop/s SimulationCazimir BostanAinda não há avaliações
- Quantum Machine Learning in Feature Hilbert Spaces: Maria@xanadu - AiDocumento12 páginasQuantum Machine Learning in Feature Hilbert Spaces: Maria@xanadu - AiCazimir BostanAinda não há avaliações
- The Sphere Packing Problem in Dimension 8: Maryna S. Viazovska April 5, 2017Documento24 páginasThe Sphere Packing Problem in Dimension 8: Maryna S. Viazovska April 5, 2017Cazimir BostanAinda não há avaliações
- Quantum Recommendation Systems: Iordanis Kerenidis Anupam Prakash September 23, 2016Documento22 páginasQuantum Recommendation Systems: Iordanis Kerenidis Anupam Prakash September 23, 2016Cazimir BostanAinda não há avaliações
- Allwinner V3s Datasheet V1.0Documento420 páginasAllwinner V3s Datasheet V1.0Cazimir BostanAinda não há avaliações
- 1000-3927 - BNO080 Datasheet v1.3Documento57 páginas1000-3927 - BNO080 Datasheet v1.3Cazimir BostanAinda não há avaliações
- NMiP FDTDDocumento51 páginasNMiP FDTDCazimir BostanAinda não há avaliações
- Invariances in Physics and Group Theory: M2/International Centre For Fundamental PhysicsDocumento189 páginasInvariances in Physics and Group Theory: M2/International Centre For Fundamental PhysicsCazimir BostanAinda não há avaliações
- Quantum Electromagnetics: A New Look, Part IDocumento21 páginasQuantum Electromagnetics: A New Look, Part ICazimir BostanAinda não há avaliações
- Yang SHEN PHD Thesis-revised-FinalDocumento241 páginasYang SHEN PHD Thesis-revised-FinalCazimir BostanAinda não há avaliações
- 4-3 Deflection Due To Bending: 164 Mechanical Engineering DesignDocumento10 páginas4-3 Deflection Due To Bending: 164 Mechanical Engineering DesignSamawat AhsanAinda não há avaliações
- Email TMK88065 PDFDocumento3 páginasEmail TMK88065 PDFlily_ng3642Ainda não há avaliações
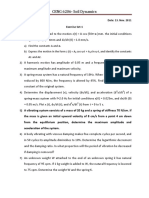
- CENG6206 Soil Dynamics ExerciseProblemDocumento4 páginasCENG6206 Soil Dynamics ExerciseProblemFekadu Wub100% (1)
- GeomediaDocumento37 páginasGeomediaEdilson MahumaneAinda não há avaliações
- Hot Water Recirculation PumpsDocumento22 páginasHot Water Recirculation Pumpsniaz kilamAinda não há avaliações
- Scenario of Shale Gas Exploration in IndiaDocumento24 páginasScenario of Shale Gas Exploration in IndiaManish TiwariAinda não há avaliações
- CHCE 3004 CHEG 333 Chemical Reaction Engineering I QP 2020 SUPPLIMENTRY - AM PDFDocumento2 páginasCHCE 3004 CHEG 333 Chemical Reaction Engineering I QP 2020 SUPPLIMENTRY - AM PDFLGK KlanAinda não há avaliações
- Passive Cooling of The Green Roofs Combined With Night-Time Ventilation and Walls Insulation in Hot and Humid RegionsDocumento25 páginasPassive Cooling of The Green Roofs Combined With Night-Time Ventilation and Walls Insulation in Hot and Humid Regionsshailesh gautamAinda não há avaliações
- 02 Chain Surveying PDFDocumento47 páginas02 Chain Surveying PDFch_nadeemhussain50% (2)
- Software Hardware ListDocumento2 páginasSoftware Hardware ListjackAinda não há avaliações
- Below Which Not More Than 5 Percent of The Test Results Are Expected To Fall"Documento13 páginasBelow Which Not More Than 5 Percent of The Test Results Are Expected To Fall"shravan iitmAinda não há avaliações
- Computer Netwroks 15CS52: Venugopala Rao A S Assistant Professor (Senior) Dept of CSE, SMVITM BantakalDocumento12 páginasComputer Netwroks 15CS52: Venugopala Rao A S Assistant Professor (Senior) Dept of CSE, SMVITM BantakalVenugopal RaoAinda não há avaliações
- Variable Displacements Axial Piston Pumps: Edition: 06/06.2020 Replaces: MVP 05 T ADocumento72 páginasVariable Displacements Axial Piston Pumps: Edition: 06/06.2020 Replaces: MVP 05 T ARidha AbbassiAinda não há avaliações
- Environmental Engineering Jobs in Bangladesh - Careerjet - Com.bdDocumento4 páginasEnvironmental Engineering Jobs in Bangladesh - Careerjet - Com.bdamrin jannatAinda não há avaliações
- Parts Catalog: Paper Feed Unit Type 3800C (G568)Documento23 páginasParts Catalog: Paper Feed Unit Type 3800C (G568)poldisagtAinda não há avaliações
- Sample Electrical LayoutDocumento1 páginaSample Electrical LayoutBentesais Bente UnoAinda não há avaliações
- Op Manual Roi-18-01Documento16 páginasOp Manual Roi-18-01William BondAinda não há avaliações
- ThanksDocumento17 páginasThankssselvanjhcAinda não há avaliações
- Genetic AlgorithmDocumento6 páginasGenetic AlgorithmShashikant ChaurasiaAinda não há avaliações
- LDT9965 Dis WasherDocumento70 páginasLDT9965 Dis WasherJosé Airton TirakowskiAinda não há avaliações
- Head & Combo: Manual 1.0Documento11 páginasHead & Combo: Manual 1.0NielsvdorstAinda não há avaliações
- DNF Stand PipeDocumento3 páginasDNF Stand PipeChristopher BrownAinda não há avaliações
- DFH00191 - RAUTHERM SPEED HKV P - TI - EN - LayoutDocumento4 páginasDFH00191 - RAUTHERM SPEED HKV P - TI - EN - LayoutRENSO BirouClujAinda não há avaliações
- Manual PSW 2600Documento18 páginasManual PSW 2600Jc C. GomezAinda não há avaliações
- Foundation Construction Challenges at 100 11th Avenue in Manhattan - Secant Pile Wall by Andrew Cushing, Et. Al.Documento8 páginasFoundation Construction Challenges at 100 11th Avenue in Manhattan - Secant Pile Wall by Andrew Cushing, Et. Al.Andrew CushingAinda não há avaliações
- Civil Engineering PDFDocumento3 páginasCivil Engineering PDFchetan c patilAinda não há avaliações
- DP Chipset 15045 DriversDocumento592 páginasDP Chipset 15045 DriversRajesh1146Ainda não há avaliações