Você também pode gostar
- K Means PDFDocumento187 páginasK Means PDFMohammed Abdul RahmanAinda não há avaliações
- K Means PDFDocumento187 páginasK Means PDFMohammed Abdul RahmanAinda não há avaliações
- Fast Unsupervised Texture Segmentation Using Active Contours Model Driven by Bhattacharyya Gradient FlowDocumento8 páginasFast Unsupervised Texture Segmentation Using Active Contours Model Driven by Bhattacharyya Gradient FlowMohammed Abdul RahmanAinda não há avaliações
- 1 PBDocumento4 páginas1 PBMohammed Abdul RahmanAinda não há avaliações
- Texture segmentation using local contrast modelsDocumento8 páginasTexture segmentation using local contrast modelsMohammed Abdul RahmanAinda não há avaliações
- Sparse Field Methods - Technical Report: Shawn Lankton July 6, 2009Documento8 páginasSparse Field Methods - Technical Report: Shawn Lankton July 6, 2009Mohammed Abdul RahmanAinda não há avaliações
- 1967 - Some Methods For Classification and Analysis OfMultivariate ObservationDocumento17 páginas1967 - Some Methods For Classification and Analysis OfMultivariate ObservationFranck DernoncourtAinda não há avaliações
- 10.1007/978 3 540 77058 9 PDFDocumento804 páginas10.1007/978 3 540 77058 9 PDFMohammed Abdul RahmanAinda não há avaliações
- 10.1007/978 3 319 10662 5 - 23Documento8 páginas10.1007/978 3 319 10662 5 - 23Mohammed Abdul RahmanAinda não há avaliações
- PDFDocumento13 páginasPDFMohammed Abdul RahmanAinda não há avaliações
- TESTDocumento2 páginasTESTMohammed Abdul RahmanAinda não há avaliações
- A New Approach For Skew Correction of Documents Based On Particle Swarm OptimizationDocumento5 páginasA New Approach For Skew Correction of Documents Based On Particle Swarm OptimizationMohammed Abdul RahmanAinda não há avaliações
- 7 MarketingDocumento16 páginas7 MarketingMohammed Abdul RahmanAinda não há avaliações
- Form&StyleDocumento28 páginasForm&StyletrebeheiramAinda não há avaliações
- Heritage Sites in Riyadh PDFDocumento3 páginasHeritage Sites in Riyadh PDFMohammed Abdul RahmanAinda não há avaliações
- PUATraining Text Game GuideDocumento18 páginasPUATraining Text Game Guidecoldfire890% (1)
- En The Miracles of MuhammadDocumento13 páginasEn The Miracles of MuhammadMohammed Abdul RahmanAinda não há avaliações
- AECommercialGridTieNEWVERSION PDFDocumento62 páginasAECommercialGridTieNEWVERSION PDFMohammed Abdul RahmanAinda não há avaliações
- Concrete Design AidsDocumento20 páginasConcrete Design AidsumtancwAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
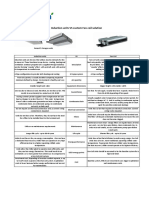
- HotelSolution: Induction Units VS Fan-Coil SolutionDocumento1 páginaHotelSolution: Induction Units VS Fan-Coil SolutionMoriyasu NguyenAinda não há avaliações
- P7 Revision QuestionsDocumento4 páginasP7 Revision Questionsapi-27344426Ainda não há avaliações
- Q3 ST 1 GR.6 Science With TosDocumento4 páginasQ3 ST 1 GR.6 Science With TosRed MariposaAinda não há avaliações
- Folder Airless Auto Serie AlDocumento2 páginasFolder Airless Auto Serie AlErika MaraAinda não há avaliações
- Formulae and Design Rules To Ec2Documento45 páginasFormulae and Design Rules To Ec2moodoo100% (4)
- Design of Masonry StructuresDocumento10 páginasDesign of Masonry StructuresmuhammedAinda não há avaliações
- TM - 11-5855-214-23&p - (N04596) PDFDocumento65 páginasTM - 11-5855-214-23&p - (N04596) PDFtyra24Ainda não há avaliações
- Is.1875 1992Documento14 páginasIs.1875 1992Sadashiva sahooAinda não há avaliações
- Analysis of Truss Using Abaqus SoftwareDocumento7 páginasAnalysis of Truss Using Abaqus SoftwareKarthick NAinda não há avaliações
- Analysis of Milk ComponentsDocumento7 páginasAnalysis of Milk Componentsgailluna112795Ainda não há avaliações
- Precast BeamDocumento8 páginasPrecast BeamMahmoud ShakerAinda não há avaliações
- Manifest Your Desires with The Quantum CookbookDocumento14 páginasManifest Your Desires with The Quantum CookbookAgarta1111Ainda não há avaliações
- CHY382-01 Ester Hydrolysis Lab ReportDocumento5 páginasCHY382-01 Ester Hydrolysis Lab ReportJoshua AunAinda não há avaliações
- Total Chloride in Alumina Supported Catalysts by Wavelength Dispersive X-Ray FluorescenceDocumento5 páginasTotal Chloride in Alumina Supported Catalysts by Wavelength Dispersive X-Ray FluorescenceJesus Gonzalez GracidaAinda não há avaliações
- Glazed Aluminum Curtain Walls (Thermawall SM 2600)Documento12 páginasGlazed Aluminum Curtain Walls (Thermawall SM 2600)RsjBugtongAinda não há avaliações
- Chemistry Project: To Study The Quantity of Casein Present in Different Samples of MilkDocumento14 páginasChemistry Project: To Study The Quantity of Casein Present in Different Samples of Milkveenu68Ainda não há avaliações
- Dane Rudhyar - The Planets and Their Symbols - MARCADODocumento13 páginasDane Rudhyar - The Planets and Their Symbols - MARCADOLuiza Machado100% (2)
- Linear DC Machine PDFDocumento21 páginasLinear DC Machine PDFAbdul Aziz0% (1)
- FDG Production-Theory Operations-FDG Synthesis Chemistr1Documento25 páginasFDG Production-Theory Operations-FDG Synthesis Chemistr1Cesar Adolfo SanchezAinda não há avaliações
- Review: Modeling Damping in Mechanical Engineering StructuresDocumento10 páginasReview: Modeling Damping in Mechanical Engineering Structuresuamiranda3518Ainda não há avaliações
- 176-fc4731 Fault CodeDocumento3 páginas176-fc4731 Fault CodeHamilton MirandaAinda não há avaliações
- Mini Project ReportDocumento37 páginasMini Project ReportPRAVIN KUMAR NAinda não há avaliações
- LM 08Documento38 páginasLM 08Tôi Là Đăng TèoAinda não há avaliações
- Nonnewtonian and Newtonian Blood Flow in Human Aorta A Transient AnalysisDocumento10 páginasNonnewtonian and Newtonian Blood Flow in Human Aorta A Transient AnalysisDivyaVatsAinda não há avaliações
- IS 516 (Part-2) Sec-1 - 2018Documento16 páginasIS 516 (Part-2) Sec-1 - 2018Sai Pavan100% (9)
- 4-1 r14Documento12 páginas4-1 r14hafizgAinda não há avaliações
- AE342 Lab1 Report Format 20182Documento7 páginasAE342 Lab1 Report Format 20182Mert YılmazAinda não há avaliações
- Introducing JiFi ST Petersburg 2014Documento4 páginasIntroducing JiFi ST Petersburg 2014danjohhnAinda não há avaliações
- XI Maths - I Terminal ExamDocumento2 páginasXI Maths - I Terminal ExamPurisai Rajamani KumarAinda não há avaliações
- Overview Aerodynamics 2017Documento10 páginasOverview Aerodynamics 2017marcoAinda não há avaliações