Você também pode gostar
- Electromagnetic Foundations of Electrical EngineeringNo EverandElectromagnetic Foundations of Electrical EngineeringAinda não há avaliações
- EE254: D2 Buck ConverterDocumento13 páginasEE254: D2 Buck ConverterNeil Hildick-SmithAinda não há avaliações
- ELEC212 Revision+Design+AssignmentDocumento15 páginasELEC212 Revision+Design+Assignmentkhan aliAinda não há avaliações
- Circuits Design For Low Power: Advance Digital Integrated Circuit DesignDocumento53 páginasCircuits Design For Low Power: Advance Digital Integrated Circuit Designជើងកាង ភូមិAinda não há avaliações
- Lecture Logical EffortDocumento111 páginasLecture Logical EffortYagami LightAinda não há avaliações
- Advanced Digital Systems Design: 02/10/2002 EE6471 (KR) 1Documento41 páginasAdvanced Digital Systems Design: 02/10/2002 EE6471 (KR) 1mohammed zubairAinda não há avaliações
- CQT Lecture #1: Nanodevices and Maxwell's DemonDocumento25 páginasCQT Lecture #1: Nanodevices and Maxwell's DemonBala MuruganAinda não há avaliações
- Analog Electronics Lab ManualDocumento9 páginasAnalog Electronics Lab ManualRohan KatkamAinda não há avaliações
- The Flash ADC A Circuit For All SeasonsDocumento5 páginasThe Flash ADC A Circuit For All Seasons于富昇Ainda não há avaliações
- Shlepnev Vias PCBEast F12Documento50 páginasShlepnev Vias PCBEast F12huytung1501Ainda não há avaliações
- SMPSDocumento46 páginasSMPSNimsiri AbhayasingheAinda não há avaliações
- DSP Design - Lecture 6: UnfoldingDocumento44 páginasDSP Design - Lecture 6: UnfoldingAbdul JabbarAinda não há avaliações
- Ee5311 Module 1 TransistorDocumento41 páginasEe5311 Module 1 TransistorSure AvinashAinda não há avaliações
- Chenming Hu ch7 SlidesDocumento43 páginasChenming Hu ch7 SlideseleenaamohapatraAinda não há avaliações
- Chapter 7 Mosfets in Ics - Scaling, Leakage, and Other TopicsDocumento43 páginasChapter 7 Mosfets in Ics - Scaling, Leakage, and Other Topicsmorcov19Ainda não há avaliações
- Lecture04 Ee474 Mos Models3Documento25 páginasLecture04 Ee474 Mos Models3khoahtkg592002Ainda não há avaliações
- 04 Lecture Logical EffortDocumento114 páginas04 Lecture Logical EffortHardhik KaranamAinda não há avaliações
- DCN L03 A v01 SWITCHING PDFDocumento12 páginasDCN L03 A v01 SWITCHING PDFMasterAlbus3dAinda não há avaliações
- Combination Logic Design: Pradondet Nilagupta Pom@ku - Ac.th Department of Computer Engineering Kasetsart UniversityDocumento78 páginasCombination Logic Design: Pradondet Nilagupta Pom@ku - Ac.th Department of Computer Engineering Kasetsart UniversitybhawnaAinda não há avaliações
- Lecture 3 Electromagnetic TransientsDocumento50 páginasLecture 3 Electromagnetic TransientsManuelAinda não há avaliações
- Planar Inter Digital Capacitors On Printed Circuit Board PDFDocumento6 páginasPlanar Inter Digital Capacitors On Printed Circuit Board PDFchiranjibaviAinda não há avaliações
- Ee554 Unit1 1Documento193 páginasEe554 Unit1 1oheneAinda não há avaliações
- EE5311-Digital IC Design: Module 2 - InterconnectsDocumento18 páginasEE5311-Digital IC Design: Module 2 - InterconnectsAnmol Sinha100% (1)
- Digital Integrated Circuits: A Design PerspectiveDocumento66 páginasDigital Integrated Circuits: A Design Perspectiveapi-127299018Ainda não há avaliações
- Electronics 11 02014 v5Documento26 páginasElectronics 11 02014 v5Marcelo Flavio GuepfrihAinda não há avaliações
- Chapters 1-2. Book Intro. - Microelectronic Devices An Intuitive Approach (Analog IC Design An Intuitive Approach)Documento29 páginasChapters 1-2. Book Intro. - Microelectronic Devices An Intuitive Approach (Analog IC Design An Intuitive Approach)Minh Hai RungAinda não há avaliações
- Lecture 16 - The PN Junction Diode (II) : 6.012 - Microelectronic Devices and Circuits - Fall 2005 Lecture 16-1Documento18 páginasLecture 16 - The PN Junction Diode (II) : 6.012 - Microelectronic Devices and Circuits - Fall 2005 Lecture 16-1Kulanthaivelu RamaswamyAinda não há avaliações
- E3 238 Analog VLSI Circuits: Lecture 3: Long Channel MOSFETDocumento9 páginasE3 238 Analog VLSI Circuits: Lecture 3: Long Channel MOSFETaxiomAinda não há avaliações
- Diode PDFDocumento83 páginasDiode PDFUtmaan DarAinda não há avaliações
- Project 1 Report 2Documento15 páginasProject 1 Report 2Phạm Viết QuânAinda não há avaliações
- Lecture38-High Speed Nyquist AdcsDocumento32 páginasLecture38-High Speed Nyquist AdcsHuyBinh LeAinda não há avaliações
- Steven Lee: Power Electronics Product Manager - Keysight Pathwave Software SolutionsDocumento31 páginasSteven Lee: Power Electronics Product Manager - Keysight Pathwave Software SolutionsVăn CôngAinda não há avaliações
- Analytical Design Procedure For ResonantInductively Coupled Wireless Power Transfer SystemWith Class-DE Inverter and Class-E RectifierDocumento4 páginasAnalytical Design Procedure For ResonantInductively Coupled Wireless Power Transfer SystemWith Class-DE Inverter and Class-E Rectifierjuan8aAinda não há avaliações
- A Novel Loss Estimation Technique For Power ConverDocumento7 páginasA Novel Loss Estimation Technique For Power ConverSridhar MAinda não há avaliações
- High - Speed Digital IC Design PDFDocumento68 páginasHigh - Speed Digital IC Design PDFVinay PalekarAinda não há avaliações
- Design of Reversible Random Access Memory: Md. Selim Al Mamun Syed Monowar HossainDocumento6 páginasDesign of Reversible Random Access Memory: Md. Selim Al Mamun Syed Monowar HossainAnas RazzaqAinda não há avaliações
- EE5311-Digital IC Design: Module 1 - The TransistorDocumento43 páginasEE5311-Digital IC Design: Module 1 - The TransistorAnmol SinhaAinda não há avaliações
- 650 To 400V, 100kW Buck ConverterDocumento13 páginas650 To 400V, 100kW Buck ConverterCataAinda não há avaliações
- A Hybrid DC-DC BuckDocumento4 páginasA Hybrid DC-DC BuckAli RazaAinda não há avaliações
- Ch3 PowerBasicsDocumento31 páginasCh3 PowerBasicsGianfrancesco FlorioAinda não há avaliações
- Power Electronics ELECTENG 734Documento29 páginasPower Electronics ELECTENG 734kibrom atsbhaAinda não há avaliações
- Differential Impedance Made Simple: FinallyDocumento25 páginasDifferential Impedance Made Simple: Finallyayyappareddy singamareddyAinda não há avaliações
- EDC Chapter Wise FormulasDocumento12 páginasEDC Chapter Wise FormulasKisthan Leymar60% (5)
- Chapter 9Documento66 páginasChapter 9arsalan.jawedAinda não há avaliações
- Digital Integrated Circuits: A Design PerspectiveDocumento60 páginasDigital Integrated Circuits: A Design Perspectivesteves0118Ainda não há avaliações
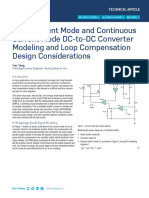
- Peak Current Mode and Continuous Current Mode DC To DC Converter Modeling2Documento8 páginasPeak Current Mode and Continuous Current Mode DC To DC Converter Modeling2rajareddy235Ainda não há avaliações
- Low Power Vlsi Design 2Documento70 páginasLow Power Vlsi Design 2Rajesh PylaAinda não há avaliações
- Lecture 10Documento75 páginasLecture 10Haji Rana ShahidAinda não há avaliações
- 2016 Ch4-DelayDocumento31 páginas2016 Ch4-Delayជើងកាង ភូមិAinda não há avaliações
- Multiple Feedback CircuitDocumento7 páginasMultiple Feedback CircuitbelmontAinda não há avaliações
- ECE 211 Digital Electronics Unit 3Documento111 páginasECE 211 Digital Electronics Unit 3Pradyut SankiAinda não há avaliações
- Eele461 Module 07Documento8 páginasEele461 Module 07zhiqian wangAinda não há avaliações
- DiffimpDocumento25 páginasDiffimpAtif ShamimAinda não há avaliações
- Lec 3Documento18 páginasLec 3api-3721075Ainda não há avaliações
- Optical Switching EditedDocumento82 páginasOptical Switching EditedVimoli MehtaAinda não há avaliações
- Control Systems Engineering: Chapter 2: Modeling in The Frequency DomainDocumento55 páginasControl Systems Engineering: Chapter 2: Modeling in The Frequency DomainAphichaya thanchaiAinda não há avaliações
- AEC Manual 2018-2019Documento99 páginasAEC Manual 2018-2019Raza SikandarAinda não há avaliações
- Digital Integrated Circuits: A Design PerspectiveDocumento113 páginasDigital Integrated Circuits: A Design PerspectiveSulochana VermaAinda não há avaliações
- Digital Integrated CircuitsDocumento66 páginasDigital Integrated CircuitsRegina MerlinAinda não há avaliações
- 1.2 Analog Data SignalDocumento38 páginas1.2 Analog Data SignalTran Hoang AnhAinda não há avaliações
- HSDD 10 10Documento26 páginasHSDD 10 10Nagaraj Chandrashekar SiddeshwarAinda não há avaliações
- The Preliminary PMU Solution Is As ShownDocumento1 páginaThe Preliminary PMU Solution Is As ShownNagaraj Chandrashekar SiddeshwarAinda não há avaliações
- Nagaraj Siddeshwar Cover LetterDocumento1 páginaNagaraj Siddeshwar Cover LetterNagaraj Chandrashekar SiddeshwarAinda não há avaliações
- Portfolio - Nagaraj Chandrashekar SiddeshwarDocumento5 páginasPortfolio - Nagaraj Chandrashekar SiddeshwarNagaraj Chandrashekar SiddeshwarAinda não há avaliações
- Post Test For ESDDocumento2 páginasPost Test For ESDNagaraj Chandrashekar SiddeshwarAinda não há avaliações
- Portfolio - Nagaraj Chandrashekar SiddeshwarDocumento5 páginasPortfolio - Nagaraj Chandrashekar SiddeshwarNagaraj Chandrashekar SiddeshwarAinda não há avaliações
- FSUP Operating Manual FW467Documento941 páginasFSUP Operating Manual FW467Nagaraj Chandrashekar SiddeshwarAinda não há avaliações
- 713 GND PWR Planes F15Documento26 páginas713 GND PWR Planes F15Nagaraj Chandrashekar SiddeshwarAinda não há avaliações
- Nagaraj Siddeshwar Curriculum VitaeDocumento2 páginasNagaraj Siddeshwar Curriculum VitaeNagaraj Chandrashekar SiddeshwarAinda não há avaliações
- Power Electronics Notes by ArunKumarDocumento565 páginasPower Electronics Notes by ArunKumarNagaraj Chandrashekar SiddeshwarAinda não há avaliações
- Data Structures PDFDocumento515 páginasData Structures PDFzahiid munirAinda não há avaliações
- 25smart Cameras in Embedded SystemsDocumento9 páginas25smart Cameras in Embedded Systemsvarushi123Ainda não há avaliações
- VLSI Implementation of Real-Time ImageDocumento4 páginasVLSI Implementation of Real-Time ImageNagaraj Chandrashekar SiddeshwarAinda não há avaliações
- Turning Five Student Progress ReportDocumento2 páginasTurning Five Student Progress ReportBryan Peterson100% (2)
- Analytics For Sustainable BusinessDocumento6 páginasAnalytics For Sustainable BusinessDeloitte AnalyticsAinda não há avaliações
- Concept Screening-PostedDocumento16 páginasConcept Screening-PostedCintia NurliyanaAinda não há avaliações
- What Is Engineering SurveyingDocumento5 páginasWhat Is Engineering SurveyingHui EdroxAinda não há avaliações
- Art of First DueDocumento32 páginasArt of First DuedadaditdahAinda não há avaliações
- 04 Vaca Muerta Shale PDFDocumento14 páginas04 Vaca Muerta Shale PDFsanty222Ainda não há avaliações
- Ca1 Pu 12Documento100 páginasCa1 Pu 12Shabbeer ZafarAinda não há avaliações
- SLE Lesson 7 - Weather CollageDocumento4 páginasSLE Lesson 7 - Weather CollageKat Causaren LandritoAinda não há avaliações
- Company Presentation - Company ProfileDocumento10 páginasCompany Presentation - Company ProfileNishtha SharmaAinda não há avaliações
- Food Specification - Fresh Produce Cut - FinalDocumento10 páginasFood Specification - Fresh Produce Cut - FinalSwamy AAinda não há avaliações
- Chiller MC Quay MacDocumento14 páginasChiller MC Quay MacJimmy Franz Caballero ZuñigaAinda não há avaliações
- Filipino ScientistsDocumento2 páginasFilipino ScientistsJohn Carlo GileAinda não há avaliações
- Eldritch HighDocumento39 páginasEldritch HighGabriel AlvarezAinda não há avaliações
- Singapore: URA Concept Plan 2011 Focus Group Preliminary RecommendationsDocumento7 páginasSingapore: URA Concept Plan 2011 Focus Group Preliminary RecommendationsThe PariahAinda não há avaliações
- NCERT Solutions For Class 6 Maths Chapter 5 Understanding Elementary ShapesDocumento51 páginasNCERT Solutions For Class 6 Maths Chapter 5 Understanding Elementary Shapespriya0% (1)
- Load Testing Best Practices Using Web LoadDocumento39 páginasLoad Testing Best Practices Using Web Loadaustinfru7Ainda não há avaliações
- Linguistic VariablesDocumento2 páginasLinguistic VariablesShankhyaneel SarkarAinda não há avaliações
- Guide To Information Technology Security ServicesDocumento84 páginasGuide To Information Technology Security ServicesSecurity Face to FaceAinda não há avaliações
- Online Assignment 1 Math Econ 2021 22Documento6 páginasOnline Assignment 1 Math Econ 2021 22Panagiotis ScordisAinda não há avaliações
- Enterprise Exam Style QuestionsDocumento2 páginasEnterprise Exam Style Questionsapi-301785352Ainda não há avaliações
- Direct SeriesDocumento22 páginasDirect SeriesSahil SethiAinda não há avaliações
- Safe City in Malaysia's ContextDocumento8 páginasSafe City in Malaysia's Contextuyunaman100% (1)
- TS en 12697-6 A1 Yoğunluk Ve Öz Kütle Tayi̇ni̇Documento17 páginasTS en 12697-6 A1 Yoğunluk Ve Öz Kütle Tayi̇ni̇DEFNEAinda não há avaliações
- Unit 29 Sentence Structure in EnglishDocumento11 páginasUnit 29 Sentence Structure in Englishj pcAinda não há avaliações
- Lista de Paineis LCD Atualizacao 26 04 2013 PDFDocumento412 páginasLista de Paineis LCD Atualizacao 26 04 2013 PDFHfssSilva100% (4)
- Usm StanDocumento5 páginasUsm StanClaresta JaniceAinda não há avaliações
- Collection of Fungal Material From Surfaces by Tape Lift: Standard Practice ForDocumento3 páginasCollection of Fungal Material From Surfaces by Tape Lift: Standard Practice ForasmaAinda não há avaliações
- Dispersion ModelingDocumento33 páginasDispersion ModelingAnuradha ChauhanAinda não há avaliações
- Star Burst EffectDocumento22 páginasStar Burst EffectDexter AlcantaraAinda não há avaliações
- Statistics in Experimental Research: Mark Anthony F. Casimiro Marikina Science High School-JHSDocumento32 páginasStatistics in Experimental Research: Mark Anthony F. Casimiro Marikina Science High School-JHSJeanne Emerose TalabuconAinda não há avaliações