Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Talk - Data Quality FrameworkDocumento30 páginasTalk - Data Quality FrameworkMatthew LawlerAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Luminiferous AetherDocumento111 páginasLuminiferous AetherPraveen KumarAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Revised Procedural Manual On Hazardous Waste Management (Revised DAO 04-36) I CONTENTS Chapter Page PDFDocumento53 páginasRevised Procedural Manual On Hazardous Waste Management (Revised DAO 04-36) I CONTENTS Chapter Page PDFdennisAinda não há avaliações
- Bp344 RampDocumento29 páginasBp344 RampmaeAinda não há avaliações
- When RC Columns Become RC Structural WallsDocumento11 páginasWhen RC Columns Become RC Structural Wallssumankanthnelluri7Ainda não há avaliações
- Magnetic SusceptibilityDocumento19 páginasMagnetic SusceptibilityPraveen KumarAinda não há avaliações
- Raul C. Cosare v. Broadcom Asia Inc. and Dante ArevaloDocumento4 páginasRaul C. Cosare v. Broadcom Asia Inc. and Dante ArevaloRam Migue SaintAinda não há avaliações
- Brownian MotionDocumento76 páginasBrownian MotionPraveen KumarAinda não há avaliações
- Augmented RealityDocumento171 páginasAugmented RealityPraveen KumarAinda não há avaliações
- IMO - PowerpointDocumento16 páginasIMO - PowerpointMahen Fernando100% (3)
- BS en 12285-1-2003 (2006)Documento162 páginasBS en 12285-1-2003 (2006)dahzahAinda não há avaliações
- Regenerative CircuitDocumento43 páginasRegenerative CircuitPraveen KumarAinda não há avaliações
- Many Body ProblemDocumento7 páginasMany Body ProblemPraveen KumarAinda não há avaliações
- Principal Quantum NumberDocumento11 páginasPrincipal Quantum NumberPraveen KumarAinda não há avaliações
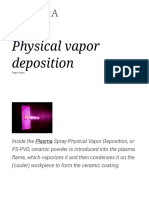
- Physical Vapor DepositionDocumento20 páginasPhysical Vapor DepositionPraveen KumarAinda não há avaliações
- Thin-Film Solar CellDocumento72 páginasThin-Film Solar CellPraveen KumarAinda não há avaliações
- Aufbau PrincipleDocumento20 páginasAufbau PrinciplePraveen KumarAinda não há avaliações
- Fluorescence MicroscopeDocumento41 páginasFluorescence MicroscopePraveen KumarAinda não há avaliações
- Self Assembled MonolayersDocumento64 páginasSelf Assembled MonolayersPraveen KumarAinda não há avaliações
- Standard Gauge RailwayDocumento44 páginasStandard Gauge RailwayPraveen KumarAinda não há avaliações
- Van 'T Hoff EquationDocumento36 páginasVan 'T Hoff EquationPraveen KumarAinda não há avaliações
- Precision Probability Index (Elf)Documento20 páginasPrecision Probability Index (Elf)EdsonnSPBrAinda não há avaliações
- Natural GeotextilesDocumento27 páginasNatural GeotextilesDr Muhammad Mushtaq Mangat100% (1)
- TQM - Juran ContributionDocumento19 páginasTQM - Juran ContributionDr.K.Baranidharan100% (2)
- Metrologic Colombia S.A.S. Medellín Medellín Colombia: Oferta Economica CO20233ADocumento3 páginasMetrologic Colombia S.A.S. Medellín Medellín Colombia: Oferta Economica CO20233AJulian MoraAinda não há avaliações
- Questionnaire On EthnocentrismDocumento14 páginasQuestionnaire On Ethnocentrismkalpa vrikshaAinda não há avaliações
- Project On Brand Awareness of ICICI Prudential by SajadDocumento99 páginasProject On Brand Awareness of ICICI Prudential by SajadSajadul Ashraf71% (7)
- Brochure PVM enDocumento36 páginasBrochure PVM enBenny Kurniawan LimAinda não há avaliações
- Tween 80 CoADocumento1 páginaTween 80 CoATấn Huy HồAinda não há avaliações
- Maintenance Repair Overhaul: Safely To New Horizons Ensuring Your Aircraft Is Ready Whenever Duty CallsDocumento10 páginasMaintenance Repair Overhaul: Safely To New Horizons Ensuring Your Aircraft Is Ready Whenever Duty CallsSuryaAinda não há avaliações
- Zintek® 300 HP + Techseal® Glossy Black SLDocumento9 páginasZintek® 300 HP + Techseal® Glossy Black SLSyedMazharAliShahAinda não há avaliações
- Saraswathi 2018Documento4 páginasSaraswathi 2018Daniel CoronelAinda não há avaliações
- Process and Inter-Process Systems For All Industries.: Cleaning Validation: An Overall PerspectiveDocumento7 páginasProcess and Inter-Process Systems For All Industries.: Cleaning Validation: An Overall PerspectiveDesarrollo de Colecciones IVIC-BMRAinda não há avaliações
- Tata Steel Ratio AnalysisDocumento41 páginasTata Steel Ratio AnalysisGourav VallakattiAinda não há avaliações
- Lecture6 - RPGT Class Exercise QDocumento4 páginasLecture6 - RPGT Class Exercise QpremsuwaatiiAinda não há avaliações
- Harrod-Domar ModelDocumento13 páginasHarrod-Domar ModelsupriyatnoyudiAinda não há avaliações
- Editing Packs I Maybe Will NeedDocumento3 páginasEditing Packs I Maybe Will NeedMijo SusićAinda não há avaliações
- Epsilon Range Bomba HorizontalDocumento8 páginasEpsilon Range Bomba HorizontalsalazarafaelAinda não há avaliações
- NO.76 Method Statement for Chemical Anchoring of Rebars on Piles - Rev.0第一次Documento5 páginasNO.76 Method Statement for Chemical Anchoring of Rebars on Piles - Rev.0第一次Amila Priyadarshana DissanayakeAinda não há avaliações
- Rhea Huddleston For Supervisor - 17467 - DR2Documento1 páginaRhea Huddleston For Supervisor - 17467 - DR2Zach EdwardsAinda não há avaliações
- Picasso OperatingInstructions Manual 211018 WEBDocumento27 páginasPicasso OperatingInstructions Manual 211018 WEBBill McFarlandAinda não há avaliações
- Notice: Customhouse Broker License Cancellation, Suspension, Etc.Documento2 páginasNotice: Customhouse Broker License Cancellation, Suspension, Etc.Justia.comAinda não há avaliações
- Lease Contract AddendumDocumento1 páginaLease Contract AddendumjasonAinda não há avaliações
- Eligibility To Become IAS Officer: Career As A IAS Officer About IAS OfficerDocumento4 páginasEligibility To Become IAS Officer: Career As A IAS Officer About IAS Officersamiie30Ainda não há avaliações