Você também pode gostar
- Análisis y diseño de piezas con Catia V5No EverandAnálisis y diseño de piezas con Catia V5Nota: 5 de 5 estrelas5/5 (1)
- Tablas MTM-1Documento3 páginasTablas MTM-1kenn berriosAinda não há avaliações
- Tablas MTM ExcelDocumento8 páginasTablas MTM ExcelCristian Bool100% (1)
- Informe Técnico No. 1 - Fisica MecánicaDocumento15 páginasInforme Técnico No. 1 - Fisica MecánicaPaola ArizaAinda não há avaliações
- Informe Virtual #03 Velocidad Rectilinea Uniforme - 2021 - 10 UPAO - Fisica1Documento7 páginasInforme Virtual #03 Velocidad Rectilinea Uniforme - 2021 - 10 UPAO - Fisica1Joaquin AguilarAinda não há avaliações
- Estimacion Del Tiempo de Una PersonaDocumento7 páginasEstimacion Del Tiempo de Una Personamatias carrascoAinda não há avaliações
- Capitulo 5 Sistemas de Tiempos y Movimientos Predeterminados - Guadalupe Trejo Parada - 000004Documento30 páginasCapitulo 5 Sistemas de Tiempos y Movimientos Predeterminados - Guadalupe Trejo Parada - 000004Luis Briones montesAinda não há avaliações
- Material de Apoyo Ago Dic 2016Documento36 páginasMaterial de Apoyo Ago Dic 2016Ramon Vicente PinedaAinda não há avaliações
- Tabla MTMDocumento6 páginasTabla MTMsaul laraAinda não há avaliações
- Tablas MTM PDFDocumento2 páginasTablas MTM PDFzisco23.100% (3)
- Mover MTM 2020Documento32 páginasMover MTM 2020marcos lopezAinda não há avaliações
- Tablas MTM PDFDocumento3 páginasTablas MTM PDFSergioAinda não há avaliações
- Tablas MTMDocumento7 páginasTablas MTMadeluchisAinda não há avaliações
- Tablas MTM y Tablas Most 2Documento1 páginaTablas MTM y Tablas Most 2Juanita PerezAinda não há avaliações
- Capitulo 5 Sistemas de Tiempos PredeterminadosDocumento30 páginasCapitulo 5 Sistemas de Tiempos PredeterminadosArmando Reyes100% (1)
- Tablas MTM de Los 19 Movimientos - 212T0003Documento34 páginasTablas MTM de Los 19 Movimientos - 212T0003VICTOR MANUEL PEREZ JIMENEZAinda não há avaliações
- Tablas MTM NiebelDocumento3 páginasTablas MTM NiebelJesús Armando Pérez SotoAinda não há avaliações
- Ejercicio CaudalDocumento1 páginaEjercicio CaudalElena DiazAinda não há avaliações
- Empujes Estaticos en Muros de ContencionDocumento3 páginasEmpujes Estaticos en Muros de ContenciondnayelifAinda não há avaliações
- Hernandez Mario Actividad 5 Laboratoria de FisicaDocumento7 páginasHernandez Mario Actividad 5 Laboratoria de FisicaMario David HernandezAinda não há avaliações
- Practica 1Documento5 páginasPractica 1Emilio Garcia DiazAinda não há avaliações
- Practica 2 Hombre en Movimiento (Completado)Documento7 páginasPractica 2 Hombre en Movimiento (Completado)Jesus OrtizAinda não há avaliações
- Tablas MTM y Tablas MostDocumento13 páginasTablas MTM y Tablas MostIchigo Shiba KurosakiAinda não há avaliações
- Resumen de Datos de MTMDocumento4 páginasResumen de Datos de MTMAlexandra PerezAinda não há avaliações
- Laboratorio 02-1Documento3 páginasLaboratorio 02-1Sleytter Granado'sAinda não há avaliações
- The Moving ManDocumento6 páginasThe Moving ManAmos RodriguezAinda não há avaliações
- Clase6 IntroINE 2021Documento19 páginasClase6 IntroINE 2021alvaroAinda não há avaliações
- MTMDocumento25 páginasMTMJuan Carlos Guillen GonzalezAinda não há avaliações
- Práctica Grupo SubgrupoDocumento5 páginasPráctica Grupo SubgrupoLiannaAinda não há avaliações
- Actividad#5Documento4 páginasActividad#5graciela torresAinda não há avaliações
- Informe Trigonometria Cambaindo A FisicaDocumento21 páginasInforme Trigonometria Cambaindo A Fisicapoker para todosAinda não há avaliações
- Tablas MTM y Tablas MostDocumento13 páginasTablas MTM y Tablas MostRoberto ChavezAinda não há avaliações
- EXPERIMENTO 2 Movimiento Rectiliena Acelerado PDFDocumento11 páginasEXPERIMENTO 2 Movimiento Rectiliena Acelerado PDFjeas tvAinda não há avaliações
- INFORME LABORATORIO FISICA Nro2Documento4 páginasINFORME LABORATORIO FISICA Nro2Andrew Rodrigo Juarez MuguerzaAinda não há avaliações
- Copiapractica 2Documento6 páginasCopiapractica 2DarkSoulsAinda não há avaliações
- Lab Oratorio 4Documento9 páginasLab Oratorio 4Gabriela MoralesAinda não há avaliações
- Practica 2 Hombre en Movimiento (2) (Recuperado Automáticamente) A PDFDocumento6 páginasPractica 2 Hombre en Movimiento (2) (Recuperado Automáticamente) A PDFAndrews MonteroAinda não há avaliações
- Graf. Control y Calidad Taller 1Documento6 páginasGraf. Control y Calidad Taller 1Amelí HerreraAinda não há avaliações
- SCM Localizacion de Plantas e ImportanciaDocumento18 páginasSCM Localizacion de Plantas e ImportanciaVaolDiAinda não há avaliações
- Ejercicios Estudiante 5Documento11 páginasEjercicios Estudiante 5Miguel Angel Pertuz CordobaAinda não há avaliações
- XXXCCCCDocumento12 páginasXXXCCCCVÁZQUEZ ARCHILA MAURICIOAinda não há avaliações
- IVDocumento26 páginasIVWalterAmericoSichaAinda não há avaliações
- Ejercicios Arena 2 Análisis de EntradaDocumento2 páginasEjercicios Arena 2 Análisis de Entradamaria1jos11berm1dezAinda não há avaliações
- Simulacion Trabajo, Energia y PotenciaDocumento9 páginasSimulacion Trabajo, Energia y PotencialauraAinda não há avaliações
- MOVIMIENTO RECTILINEO UNIFORME - Docx JCGDocumento5 páginasMOVIMIENTO RECTILINEO UNIFORME - Docx JCGJIMENA NICOLE CASTILLO YANGUAAinda não há avaliações
- Estadistica Descriptiva Con MATLABDocumento13 páginasEstadistica Descriptiva Con MATLABMarianela MtzAinda não há avaliações
- Practica 2 Hombre en MovimientoDocumento7 páginasPractica 2 Hombre en MovimientoGabriel RiveraAinda não há avaliações
- Modelos Pert-Cpm 2Documento11 páginasModelos Pert-Cpm 2Leonardo LaraAinda não há avaliações
- Tabla MTM - Tmu Unidades de Medicion de TiempoDocumento1 páginaTabla MTM - Tmu Unidades de Medicion de TiempoAndrésFlores50% (2)
- Aevalo Liliana Tarea#3Documento10 páginasAevalo Liliana Tarea#3LILIANA GIVELY AREVALO CASAÑAAinda não há avaliações
- Informe Laboratorio 5Documento12 páginasInforme Laboratorio 5Brayan David Estavez IbarraAinda não há avaliações
- Lab Prac 2Documento7 páginasLab Prac 2call of vics12 cabsilvAinda não há avaliações
- Actividad Experimental-Fisica GeneralDocumento2 páginasActividad Experimental-Fisica GeneralNadia CAinda não há avaliações
- Guía Práctica No 5Documento8 páginasGuía Práctica No 5Nikki MillaAinda não há avaliações
- Rep P8 - EQ - 9Documento14 páginasRep P8 - EQ - 9El HatchiAinda não há avaliações
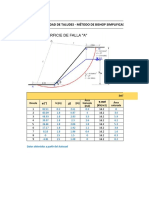
- Bishop SimplificadoDocumento3 páginasBishop SimplificadoMichelle HerreraAinda não há avaliações
- S07.s7 TAREA Teoría de La COSTOS-1Documento8 páginasS07.s7 TAREA Teoría de La COSTOS-1David Alva TenorioAinda não há avaliações
- Determinación de La Velocidad de Un ProyectilDocumento5 páginasDeterminación de La Velocidad de Un ProyectilNathaly Galvez SarriaAinda não há avaliações
- Salgado Mayte Act05Documento6 páginasSalgado Mayte Act05Alex ContrerasAinda não há avaliações
- Cargo de Recepcion Del Reglamento FirmadoDocumento2 páginasCargo de Recepcion Del Reglamento FirmadoPaul Tello RojasAinda não há avaliações
- Seleccion Concurso PracticanteDocumento3 páginasSeleccion Concurso PracticantePaul Tello RojasAinda não há avaliações
- Contrato de TrabajoDocumento3 páginasContrato de TrabajoPaul Tello RojasAinda não há avaliações
- Ficha de Datos I.Documento4 páginasFicha de Datos I.Paul Tello RojasAinda não há avaliações
- Ficha de Datos I.Documento4 páginasFicha de Datos I.Paul Tello RojasAinda não há avaliações
- ANEXOS02 y 03Documento2 páginasANEXOS02 y 03Paul Tello RojasAinda não há avaliações
- Material Gozinto PDFDocumento6 páginasMaterial Gozinto PDFPaul Tello RojasAinda não há avaliações
- Ejercicio 1 AccessDocumento5 páginasEjercicio 1 AccessLuis Eduardo Rodriguez BoyacaAinda não há avaliações
- Llenar Marcador GruposDocumento5 páginasLlenar Marcador GruposPaul Tello RojasAinda não há avaliações
- Material Gozinto PDFDocumento6 páginasMaterial Gozinto PDFPaul Tello RojasAinda não há avaliações
- Material Gozinto PDFDocumento6 páginasMaterial Gozinto PDFPaul Tello RojasAinda não há avaliações
- Ingenieria de Metodos - Manual de PracticasDocumento128 páginasIngenieria de Metodos - Manual de PracticasOmarAinda não há avaliações
- ReporteDocumento1 páginaReportePaul Tello RojasAinda não há avaliações
- Material Gozinto PDFDocumento6 páginasMaterial Gozinto PDFPaul Tello RojasAinda não há avaliações
- Formato CajachicaDocumento1 páginaFormato CajachicaPaul Tello RojasAinda não há avaliações
- Ingenieria de Metodos II Cl09 2011 0Documento13 páginasIngenieria de Metodos II Cl09 2011 0Paul Tello RojasAinda não há avaliações
- Ingenieria de Metodos II Cl04 2011 0Documento8 páginasIngenieria de Metodos II Cl04 2011 0Paul Tello RojasAinda não há avaliações
- Ingenieria de Metodos II-cl08-2011-0Documento12 páginasIngenieria de Metodos II-cl08-2011-0Christian Panduro VelaAinda não há avaliações
- ExportDocumento6 páginasExportPaul Tello RojasAinda não há avaliações
- Ingeneiria de Metodos II Cl07 2011 0Documento10 páginasIngeneiria de Metodos II Cl07 2011 0Paul Tello Rojas100% (1)
- Distribución PlantaDocumento32 páginasDistribución PlantaPaul Tello RojasAinda não há avaliações
- Ingenieria de Metodos II Cl02 2011 0Documento11 páginasIngenieria de Metodos II Cl02 2011 0Paul Tello RojasAinda não há avaliações
- Tamaño ProyectoDocumento3 páginasTamaño ProyectoPaul Tello RojasAinda não há avaliações
- Ingenieria de Metodos II-cl08-2011-0Documento12 páginasIngenieria de Metodos II-cl08-2011-0Christian Panduro VelaAinda não há avaliações
- Ingenieria de Metodos II Cl03 2011 0Documento42 páginasIngenieria de Metodos II Cl03 2011 0Paul Tello RojasAinda não há avaliações
- Ingenieria de Metodos II Cl02 2011 0Documento11 páginasIngenieria de Metodos II Cl02 2011 0Paul Tello RojasAinda não há avaliações
- Ingeneiria de Metodos II Cl07 2011 0Documento10 páginasIngeneiria de Metodos II Cl07 2011 0Paul Tello Rojas100% (1)
- COLLAZOS - Rediseño Del Sistema Productivo Utilizando Técnicas de Distribución de Planta PDFDocumento84 páginasCOLLAZOS - Rediseño Del Sistema Productivo Utilizando Técnicas de Distribución de Planta PDFAnonymous PsEz5kGVaeAinda não há avaliações
- Ingeneiria de Metodos II Cl07 2011 0Documento10 páginasIngeneiria de Metodos II Cl07 2011 0Paul Tello Rojas100% (1)
- Tema V El ParrafoDocumento3 páginasTema V El ParrafomichellAinda não há avaliações
- Cuadro Comparativo de SgbaDocumento3 páginasCuadro Comparativo de SgbaMariana Hernandez MenesesAinda não há avaliações
- Infografía Actividad 1Documento2 páginasInfografía Actividad 1jhonatanAinda não há avaliações
- CUADERNOS - CERVANTES - La Experiencia de La PoesíaDocumento8 páginasCUADERNOS - CERVANTES - La Experiencia de La PoesíaRosanaAcquaroniAinda não há avaliações
- Bilingüismo en EspañaDocumento4 páginasBilingüismo en EspañaDianaAinda não há avaliações
- 0.5 - Las Preposiciones Esenciales en La Lengua InglesaDocumento4 páginas0.5 - Las Preposiciones Esenciales en La Lengua InglesaAlberto CarranzaAinda não há avaliações
- Guia Grado 4° LenguajeDocumento7 páginasGuia Grado 4° LenguajeErika Paola Murcia Pedraza100% (1)
- Modulo Castellano Grado Cuarto Periodo TresDocumento13 páginasModulo Castellano Grado Cuarto Periodo TresJhon Bladimir Gil RestrepoAinda não há avaliações
- Manual TegDocumento119 páginasManual TegIng Luis Orozco GonzalezAinda não há avaliações
- 8vo FICHA #7 EE SS Q2 P1Documento3 páginas8vo FICHA #7 EE SS Q2 P1ivan barrezuetaAinda não há avaliações
- HTMLDocumento50 páginasHTMLLilia Zarate BenitezAinda não há avaliações
- Disortografia 05 Febrero 2021Documento35 páginasDisortografia 05 Febrero 2021mariaAinda não há avaliações
- Evaluación Final BORRADORDocumento5 páginasEvaluación Final BORRADORPascualClementeAlonsoAinda não há avaliações
- Gráficos Con Java 2DDocumento42 páginasGráficos Con Java 2Dmorgoth_bass100% (1)
- Actividades Ce CiDocumento1 páginaActividades Ce CiJorge OviedoAinda não há avaliações
- Texto ICA PDFDocumento215 páginasTexto ICA PDFGenesis Naomi100% (2)
- Conocimiento y EspacioDocumento6 páginasConocimiento y EspacioGeozintleAinda não há avaliações
- Presentacion RomaDocumento1 páginaPresentacion RomaFrancis EpiAinda não há avaliações
- La Nube Del No Saber PDFDocumento95 páginasLa Nube Del No Saber PDFCarlos Reyes ÁvilaAinda não há avaliações
- Diagrama Entidad RelaciónDocumento7 páginasDiagrama Entidad RelaciónDany SevillanoAinda não há avaliações
- Historia de America Latina - Leslie BethellDocumento413 páginasHistoria de America Latina - Leslie BethellChristian YañezAinda não há avaliações
- Fuentes HistoricasDocumento6 páginasFuentes HistoricasCliver Rivas RodriguezAinda não há avaliações
- Adjetivo Pronombre ArticuloDocumento11 páginasAdjetivo Pronombre ArticuloZuzziie Kiu100% (1)
- PictogramasDocumento5 páginasPictogramasPatricia ValenzuelaAinda não há avaliações
- Castoriadis Osvaldo BonannoDocumento46 páginasCastoriadis Osvaldo BonannoNahuelAban0% (1)
- 1ro Programación Anual Unidad de Aprendizaje Sesión de Aprendizaje ReparadoDocumento59 páginas1ro Programación Anual Unidad de Aprendizaje Sesión de Aprendizaje ReparadoHugo Ataucusi CongaAinda não há avaliações
- Animal FarmDocumento3 páginasAnimal FarmAriane CarbajalAinda não há avaliações
- Comunicacion Lunes 7-08-2023Documento9 páginasComunicacion Lunes 7-08-2023Luzmarina Sullca avilaAinda não há avaliações
- Lengua de Signos EspañolaDocumento88 páginasLengua de Signos EspañolaMamen Lima33% (3)
- Eta 02-04-18Documento8 páginasEta 02-04-18Angelillo Kll LAinda não há avaliações