Você também pode gostar
- Thedynamics2modelardls PDFDocumento25 páginasThedynamics2modelardls PDFandika paradiptaAinda não há avaliações
- Robust Regression Breakdown PointsDocumento23 páginasRobust Regression Breakdown PointsVivian HuAinda não há avaliações
- L Evy Processes in Finance: A Remedy To The Non-Stationarity of Continuous MartingalesDocumento10 páginasL Evy Processes in Finance: A Remedy To The Non-Stationarity of Continuous Martingalesalste7806412Ainda não há avaliações
- Andersson Djehiche - AMO 2011Documento16 páginasAndersson Djehiche - AMO 2011artemischen0606Ainda não há avaliações
- On The Overestimation of Widely Applicable Bayesian Information CriterionDocumento12 páginasOn The Overestimation of Widely Applicable Bayesian Information CriterionGaston GBAinda não há avaliações
- Linear Regression, Active LearningDocumento10 páginasLinear Regression, Active Learningjuanagallardo01Ainda não há avaliações
- Comp Phys-ItoDocumento12 páginasComp Phys-ItoFatemeh MohammadiAinda não há avaliações
- Ps 1Documento5 páginasPs 1Emre UysalAinda não há avaliações
- Integral Transforms: Richard Earl (Edited, and Chapter 6 Added, by Sam Howison) Hilary Term 2019Documento58 páginasIntegral Transforms: Richard Earl (Edited, and Chapter 6 Added, by Sam Howison) Hilary Term 2019EDU CIPANAAinda não há avaliações
- Ex 3Documento1 páginaEx 3Alex OringenAinda não há avaliações
- 41 DeepLearningDocumento4 páginas41 DeepLearningCaballero Alférez Roy TorresAinda não há avaliações
- Convergence Analysis of Optimization AlgorithmsDocumento14 páginasConvergence Analysis of Optimization AlgorithmsDedy Junaidy Raya AluminiumAinda não há avaliações
- Illinois Econ 536 Dynamic Demand ModelsDocumento7 páginasIllinois Econ 536 Dynamic Demand ModelsMaria RoaAinda não há avaliações
- 1 Lecture 5b: Probabilistic Perspectives On ML AlgorithmsDocumento6 páginas1 Lecture 5b: Probabilistic Perspectives On ML AlgorithmsJeremy WangAinda não há avaliações
- ch2 PDFDocumento22 páginasch2 PDFJorge Vega RodríguezAinda não há avaliações
- Parity-time symmetry breaking physics of dissipative Mott insulatorsDocumento30 páginasParity-time symmetry breaking physics of dissipative Mott insulatorsHimadri BarmanAinda não há avaliações
- Graduate Macro Theory II: Notes On Time SeriesDocumento20 páginasGraduate Macro Theory II: Notes On Time SeriesgodoybrAinda não há avaliações
- Parity-time symmetry breaking physics of dissipative Mott insulatorsDocumento25 páginasParity-time symmetry breaking physics of dissipative Mott insulatorsHimadri BarmanAinda não há avaliações
- Simulating Stochastic Differential Equations: 1 Brief Review of Stochastic Calculus and It O's LemmaDocumento9 páginasSimulating Stochastic Differential Equations: 1 Brief Review of Stochastic Calculus and It O's Lemmaorg25grAinda não há avaliações
- Note 4: EECS 189 Introduction To Machine Learning Fall 2020 1 MLE and MAP For Regression (Part I)Documento6 páginasNote 4: EECS 189 Introduction To Machine Learning Fall 2020 1 MLE and MAP For Regression (Part I)Rohan DebAinda não há avaliações
- CS229 Problem Set #1 Solutions: Supervised LearningDocumento10 páginasCS229 Problem Set #1 Solutions: Supervised Learningsuhar adiAinda não há avaliações
- Introduction To ARMA Models: T Iid 2Documento15 páginasIntroduction To ARMA Models: T Iid 2vicky.sajnaniAinda não há avaliações
- Quasi Maximum Likelihood - ApplicationsDocumento17 páginasQuasi Maximum Likelihood - ApplicationsAnonymous tsTtieMHDAinda não há avaliações
- Solutions ResonanceDocumento8 páginasSolutions ResonancejoseAinda não há avaliações
- Chapter 2 - Lecture NotesDocumento20 páginasChapter 2 - Lecture NotesJoel Tan Yi JieAinda não há avaliações
- Wright SlidesDocumento232 páginasWright SlidesKun DengAinda não há avaliações
- Bellman EquationDocumento13 páginasBellman EquationsurajdhunnaAinda não há avaliações
- Lect02 HandoutsDocumento23 páginasLect02 HandoutsXaocyc hosseiniAinda não há avaliações
- 08 Aos674Documento30 páginas08 Aos674siti hayatiAinda não há avaliações
- Monte-Carlo Methods for Estimating Values of Stochastic ProcessesDocumento11 páginasMonte-Carlo Methods for Estimating Values of Stochastic ProcessescarreragerardoAinda não há avaliações
- The Implied Volatility of Forward Starting Options: ATM Short-Time Level, Skew and CurvatureDocumento21 páginasThe Implied Volatility of Forward Starting Options: ATM Short-Time Level, Skew and CurvatureAnonymous 5mSMeP2jAinda não há avaliações
- Lec1 09 PDFDocumento21 páginasLec1 09 PDFSri RamAinda não há avaliações
- cs229.... Machine Language. Andrew NGDocumento17 páginascs229.... Machine Language. Andrew NGkrishnaAinda não há avaliações
- APA Chapter3 T20Documento24 páginasAPA Chapter3 T20XxXavillitoxX 5Ainda não há avaliações
- Log-Linearizing Around The Steady State A Guide WiDocumento19 páginasLog-Linearizing Around The Steady State A Guide WiLord Vilis LMAinda não há avaliações
- PTB Talk TifrDocumento26 páginasPTB Talk TifrHimadri BarmanAinda não há avaliações
- Lec 11Documento34 páginasLec 11DianaAinda não há avaliações
- 3 Bayesian Deep LearningDocumento33 páginas3 Bayesian Deep LearningNishanth ManikandanAinda não há avaliações
- 1 Solving Systems of Linear InequalitiesDocumento4 páginas1 Solving Systems of Linear InequalitiesylwAinda não há avaliações
- BAYES ESTIMATOR OF ONE PARAMETER GAMMA DISTRIBUTIONDocumento16 páginasBAYES ESTIMATOR OF ONE PARAMETER GAMMA DISTRIBUTIONAyush choudharyAinda não há avaliações
- Limit Theorems, OLS, and HACDocumento7 páginasLimit Theorems, OLS, and HACJawhar BachaAinda não há avaliações
- 101 Madsen 4Documento55 páginas101 Madsen 4Ankit MistryAinda não há avaliações
- Presentation Draft FMEFMDocumento27 páginasPresentation Draft FMEFMDavid SaccoAinda não há avaliações
- Notes2 PDFDocumento31 páginasNotes2 PDFeyenirAinda não há avaliações
- Chapter 2 - Lecture SlidesDocumento74 páginasChapter 2 - Lecture SlidesJoel Tan Yi JieAinda não há avaliações
- Karush-Kuhn-Tucker (KKT) Conditions: Lecture 11: Convex OptimizationDocumento4 páginasKarush-Kuhn-Tucker (KKT) Conditions: Lecture 11: Convex OptimizationaaayoubAinda não há avaliações
- Slides Chapter 3bDocumento50 páginasSlides Chapter 3bLuca Leimbeck Del DucaAinda não há avaliações
- Local Existence and Blow-Up Criterion of 3D Ideal Magnetohydrodynamics EquationsDocumento8 páginasLocal Existence and Blow-Up Criterion of 3D Ideal Magnetohydrodynamics EquationsNo FaceAinda não há avaliações
- Ornstein-Uhlenbeck Processes and ExtensionsDocumento16 páginasOrnstein-Uhlenbeck Processes and ExtensionsMatt LorigAinda não há avaliações
- Nonlinear Least Squares Theory - Lecture NotesDocumento33 páginasNonlinear Least Squares Theory - Lecture NotesAnonymous tsTtieMHDAinda não há avaliações
- 1 HJB: The Stochastic Case: 1.1 Brownian MotionDocumento10 páginas1 HJB: The Stochastic Case: 1.1 Brownian Motionfatcode27Ainda não há avaliações
- IEOR 4701 Introduction to Stochastic CalculusDocumento10 páginasIEOR 4701 Introduction to Stochastic CalculusChevy TeoAinda não há avaliações
- 220 Logistic RegressionDocumento5 páginas220 Logistic Regressionmihir thakkar100% (1)
- 00 Dynamic Systems GuideDocumento16 páginas00 Dynamic Systems Guideyalcin88Ainda não há avaliações
- IEEE SIGNAL PROC. LETTERS, VOL. 21, NO. 8, PP. 985–989, AUG. 2014Documento5 páginasIEEE SIGNAL PROC. LETTERS, VOL. 21, NO. 8, PP. 985–989, AUG. 2014Augusto ZebadúaAinda não há avaliações
- Fundamentals of Statistics (18.6501x)Documento20 páginasFundamentals of Statistics (18.6501x)Sourabh SinghAinda não há avaliações
- PrincipalComponentAnalysisofBinaryData - Applicationstoroll Call AnalysisDocumento32 páginasPrincipalComponentAnalysisofBinaryData - Applicationstoroll Call Analysisshree_sahaAinda não há avaliações
- A Case of One-to-One Correspondence Between Almost Automorphic and Asymptotically Almost Automorphic SolutionsDocumento2 páginasA Case of One-to-One Correspondence Between Almost Automorphic and Asymptotically Almost Automorphic SolutionsSennahAinda não há avaliações
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Ainda não há avaliações
- AC6 User GuideDocumento94 páginasAC6 User GuideEnergoCentrAinda não há avaliações
- Analytical Approach To Decision MakingDocumento9 páginasAnalytical Approach To Decision MakingaluiscgAinda não há avaliações
- Tabela De+ Ivros Digital CI 1SEM 2019Documento1 páginaTabela De+ Ivros Digital CI 1SEM 2019Danielle Gonçalves100% (1)
- C19a Rio's SpreadsheetDocumento8 páginasC19a Rio's SpreadsheetaluiscgAinda não há avaliações
- C19a Rio's SpreadsheetDocumento8 páginasC19a Rio's SpreadsheetaluiscgAinda não há avaliações
- Analytical Approach To Decision MakingDocumento9 páginasAnalytical Approach To Decision MakingaluiscgAinda não há avaliações
- c19b - Cash Flow To Equity - ModelDocumento6 páginasc19b - Cash Flow To Equity - ModelaluiscgAinda não há avaliações
- OLS: Estimation and Standard Errors: Brandon LeeDocumento13 páginasOLS: Estimation and Standard Errors: Brandon LeealuiscgAinda não há avaliações
- Schedule 2017 Fall FIN 521Documento1 páginaSchedule 2017 Fall FIN 521aluiscgAinda não há avaliações
- Stochastic Calculus II: Brandon LeeDocumento8 páginasStochastic Calculus II: Brandon LeealuiscgAinda não há avaliações
- c19b - Cash Flow To Equity - ModelDocumento6 páginasc19b - Cash Flow To Equity - ModelaluiscgAinda não há avaliações
- Fundamental Theorem of Asset Pricing ExplainedDocumento12 páginasFundamental Theorem of Asset Pricing ExplainedaluiscgAinda não há avaliações
- Introduction To Econometrics: Brandon LeeDocumento12 páginasIntroduction To Econometrics: Brandon LeealuiscgAinda não há avaliações
- MIT15 450F10 Rec03 PDFDocumento9 páginasMIT15 450F10 Rec03 PDFaluiscgAinda não há avaliações
- Applications of Risk-Neutral Pricing: Brandon LeeDocumento15 páginasApplications of Risk-Neutral Pricing: Brandon LeealuiscgAinda não há avaliações
- Black-Scholes Formula: Brandon LeeDocumento9 páginasBlack-Scholes Formula: Brandon LeealuiscgAinda não há avaliações
- Schedule 2017 Fall FIN 522Documento1 páginaSchedule 2017 Fall FIN 522aluiscgAinda não há avaliações
- Financial Management Course Book BibliographyDocumento2 páginasFinancial Management Course Book BibliographyaluiscgAinda não há avaliações
- A Arte Da Gestão de Performance PDFDocumento19 páginasA Arte Da Gestão de Performance PDFaluiscgAinda não há avaliações
- BCG Art of Risk Management Apr 2017 Tcm9 153878Documento21 páginasBCG Art of Risk Management Apr 2017 Tcm9 153878Alma LanderoAinda não há avaliações
- Fundamentals of Finance Rafael Felipe Schiozer 12013 Eletiva FinDocumento1 páginaFundamentals of Finance Rafael Felipe Schiozer 12013 Eletiva FinaluiscgAinda não há avaliações
- Hewlett-Packard 10BII: Basic Calculator FunctionsDocumento18 páginasHewlett-Packard 10BII: Basic Calculator FunctionsNaqeebullah HaideryAinda não há avaliações
- A Arte Da Alocação de CapitalDocumento7 páginasA Arte Da Alocação de CapitalaluiscgAinda não há avaliações
- 105813Documento17 páginas105813aluiscgAinda não há avaliações
- Baii Plus TutorialDocumento17 páginasBaii Plus TutorialRachel GoodlyAinda não há avaliações
- Treasury PerscpectivesDocumento44 páginasTreasury PerscpectivesaluiscgAinda não há avaliações
- Fundamentals of Finance Rafael Felipe Schiozer 12013 Eletiva FinDocumento1 páginaFundamentals of Finance Rafael Felipe Schiozer 12013 Eletiva FinaluiscgAinda não há avaliações
- MSC in Financial ManagementDocumento2 páginasMSC in Financial ManagementaluiscgAinda não há avaliações
- Database Normalization Is The Process of Organizing The Fields and Tables of A Relational Database To Minimize RedundancyDocumento2 páginasDatabase Normalization Is The Process of Organizing The Fields and Tables of A Relational Database To Minimize RedundancyStan DitonaAinda não há avaliações
- Image Similarity Measure Using Color Histogram, Color Coherence Vector, and Sobel MethodDocumento6 páginasImage Similarity Measure Using Color Histogram, Color Coherence Vector, and Sobel MethodIjsrnet EditorialAinda não há avaliações
- Kurd Live - PastebinDocumento2 páginasKurd Live - PastebinMmmmohAinda não há avaliações
- Charge AmpsDocumento5 páginasCharge AmpsKrishnamurthy AnantharamakrishnanAinda não há avaliações
- DISCOVERY SP-ENG V. 0.6 - Leonali 1463Documento30 páginasDISCOVERY SP-ENG V. 0.6 - Leonali 1463Hanz RodriguezAinda não há avaliações
- Norma Astm A234 WPBDocumento6 páginasNorma Astm A234 WPBJuan Carlos CastroAinda não há avaliações
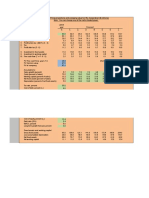
- Phase Shifted Full Bridge Converter for EV Battery ChargingDocumento23 páginasPhase Shifted Full Bridge Converter for EV Battery ChargingArun.G eeea2016Ainda não há avaliações
- Bms & Hvac SystemDocumento41 páginasBms & Hvac SystemHirushan Menuka100% (2)
- TG078 TC ER Tray Cable RatingDocumento2 páginasTG078 TC ER Tray Cable Ratingphugogang1Ainda não há avaliações
- Machine Guarding LP PDFDocumento4 páginasMachine Guarding LP PDFrexivyAinda não há avaliações
- TachometerDocumento51 páginasTachometerKiran SugandhiAinda não há avaliações
- Competency-Check-H e I ADocumento20 páginasCompetency-Check-H e I Abaldo yellow4Ainda não há avaliações
- Thermochemistry: Purpose of The ExperimentDocumento20 páginasThermochemistry: Purpose of The ExperimentAngel LacsonAinda não há avaliações
- British Standard: A Single Copy of This British Standard Is Licensed ToDocumento33 páginasBritish Standard: A Single Copy of This British Standard Is Licensed ToevangalionAinda não há avaliações
- MC Lab Manual ModifiedDocumento64 páginasMC Lab Manual ModifiedBaswamy CseAinda não há avaliações
- Nagios Enable NRPEDocumento2 páginasNagios Enable NRPEMartin RuswandaAinda não há avaliações
- Coils TransponderDocumento4 páginasCoils TransponderGuadalajara JaliscoAinda não há avaliações
- Part - I (MCQ) (Compulsory) : M A A ADocumento4 páginasPart - I (MCQ) (Compulsory) : M A A AAfzaal GhaziAinda não há avaliações
- Cantonk HD-Analog Cameras Price List V201407BDocumento7 páginasCantonk HD-Analog Cameras Price List V201407BCatalin StefanutAinda não há avaliações
- Fertilizer Granulating Machine TypesDocumento4 páginasFertilizer Granulating Machine TypesMichael MedinaAinda não há avaliações
- 01 - Introduction To Aircraft DrawingDocumento33 páginas01 - Introduction To Aircraft Drawing14Muhammad Abdur RakhmanAinda não há avaliações
- HOMOLOGOUS SERIES ORGANIC CHEMISTRY BASICS-past-paper-questionsDocumento12 páginasHOMOLOGOUS SERIES ORGANIC CHEMISTRY BASICS-past-paper-questionsJo PatrickAinda não há avaliações
- Centrifugal Aftermarket Solutions BrochureDocumento8 páginasCentrifugal Aftermarket Solutions BrochureJose Renato MendesAinda não há avaliações
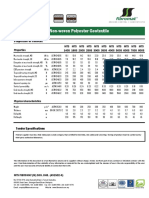
- FibrotexDocumento2 páginasFibrotexMan ChupingAinda não há avaliações
- Connector CatalogDocumento60 páginasConnector CatalogYadira De De Ciam100% (1)
- Eiac RQ Ib 004Documento25 páginasEiac RQ Ib 004esivaks2000100% (1)
- WRCLA Designers HandbookDocumento11 páginasWRCLA Designers HandbookHoang NguyenAinda não há avaliações
- System 1: Bently NevadaDocumento4 páginasSystem 1: Bently Nevadanabil160874Ainda não há avaliações
- Westinghouse Manuals PDFDocumento38 páginasWestinghouse Manuals PDFCarl HensonAinda não há avaliações
- TUK EECQ 5291 - Professional Engineering Practice - April 2018Documento314 páginasTUK EECQ 5291 - Professional Engineering Practice - April 2018gaza manAinda não há avaliações