Você também pode gostar
- Ejercicios Gases Ideales y Carta de CompresibilidadDocumento1 páginaEjercicios Gases Ideales y Carta de Compresibilidadela7cu-6147740% (1)
- Control Automatico Solucionario 160701194406Documento4 páginasControl Automatico Solucionario 160701194406Joan GarciaAinda não há avaliações
- Electronica Analogica (Deteccion de Averias)Documento11 páginasElectronica Analogica (Deteccion de Averias)Eduardo Parra HDezAinda não há avaliações
- Modulador de FrecuenciaDocumento3 páginasModulador de FrecuenciaJair VAinda não há avaliações
- L03 FallasEstaticas Ejemplos PDFDocumento12 páginasL03 FallasEstaticas Ejemplos PDFKevinElemJordyVílchezLópezAinda não há avaliações
- Ejercicios Compresor DualDocumento5 páginasEjercicios Compresor DualAlejandra PadillaAinda não há avaliações
- Bomba de DiafragmaDocumento6 páginasBomba de DiafragmaJorgeRíosFigueroa100% (1)
- Problemas de Diagrama de BloquesDocumento1 páginaProblemas de Diagrama de BloquesPepeAinda não há avaliações
- TALLER PRIMER PARCIAL MICROS 2 ElkinDocumento6 páginasTALLER PRIMER PARCIAL MICROS 2 ElkinSebastian ZuluagaAinda não há avaliações
- Mecanismos: Biela-Manivela-CorrederaDocumento3 páginasMecanismos: Biela-Manivela-CorrederaOdinAguilarAinda não há avaliações
- 32 Presentación de Tratamiento Del Aire A La Salida de CompresorDocumento19 páginas32 Presentación de Tratamiento Del Aire A La Salida de CompresorWalter MendezAinda não há avaliações
- Ciclo Invertido de RefrigeracionDocumento33 páginasCiclo Invertido de RefrigeracionDaniel Carlos Vidal Díaz100% (1)
- Cuestionario ConvertidoresDocumento6 páginasCuestionario ConvertidoresCrsitianAinda não há avaliações
- Balance General de EntropíaDocumento11 páginasBalance General de EntropíaEl hugolAinda não há avaliações
- Factor de Rugosidad para Tubos de AceroDocumento9 páginasFactor de Rugosidad para Tubos de AceroArthezzy RAinda não há avaliações
- Unidad II Convertidores de SeñalDocumento24 páginasUnidad II Convertidores de SeñalAngel FabianAinda não há avaliações
- Diseño y Construcción de Un Motor de InducciónDocumento6 páginasDiseño y Construcción de Un Motor de InducciónLuis Carlos JaramilloAinda não há avaliações
- Informe CuadripolosDocumento20 páginasInforme CuadripolosWall BlackAinda não há avaliações
- Transductores AnalógicosDocumento6 páginasTransductores AnalógicosFidel MedranoAinda não há avaliações
- Unidad 3 Introducción A La Teoría de Control.Documento29 páginasUnidad 3 Introducción A La Teoría de Control.Juan EduardoAinda não há avaliações
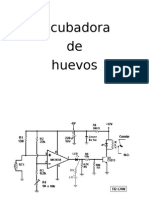
- Incubadora de HuevosDocumento4 páginasIncubadora de HuevosyonisfAinda não há avaliações
- Termómetro de ExpansiónDocumento8 páginasTermómetro de ExpansiónDanny LeyvaAinda não há avaliações
- A Un Dispositivo Que Funciona en Regimen Estacionario Entra Vapor de Agua A 160bar y 560Documento7 páginasA Un Dispositivo Que Funciona en Regimen Estacionario Entra Vapor de Agua A 160bar y 560Vanny PedrinAinda não há avaliações
- Problema 8Documento2 páginasProblema 8egabriel09Ainda não há avaliações
- Sistemas de Control Aplicado - Sincronización de Semáforos Con PLCDocumento5 páginasSistemas de Control Aplicado - Sincronización de Semáforos Con PLCLeandro BertoluzziAinda não há avaliações
- Investigacion Transferencia de CalorDocumento3 páginasInvestigacion Transferencia de Calorgeovanny manoloAinda não há avaliações
- Control Automatico Con LDRDocumento9 páginasControl Automatico Con LDRluis mostacero alvaAinda não há avaliações
- Practica 6 3CM1Documento10 páginasPractica 6 3CM1Jake2310100% (2)
- Sintonizacion Por ReleDocumento4 páginasSintonizacion Por ReleCrazyChriz Relikia Creww100% (1)
- Informe de Control de TemperaturaDocumento7 páginasInforme de Control de TemperaturaCRISTIAN CAMILO HIGUERA HENAOAinda não há avaliações
- Unidad 6 SaberDocumento17 páginasUnidad 6 SaberAdrian ReynozaAinda não há avaliações
- Trea de Termodinamica 24Documento1 páginaTrea de Termodinamica 24Juan Jose Rodriguez Casallo0% (1)
- Laboratorio-3 - ELECTRICIDAD DOMICILIARADocumento3 páginasLaboratorio-3 - ELECTRICIDAD DOMICILIARALuis Javier Cartagena AjuachoAinda não há avaliações
- Instrumentos en ProteusDocumento48 páginasInstrumentos en ProteusMarco Antonio Chavez Nabor100% (1)
- Simulacion de Circuitos RC RL RLC AtpdrawDocumento8 páginasSimulacion de Circuitos RC RL RLC AtpdrawDouglas Carreño100% (1)
- Ciclo de CarnotDocumento7 páginasCiclo de CarnotwilpizarroAinda não há avaliações
- 1.3.2 Control Lazo CerradoDocumento4 páginas1.3.2 Control Lazo CerradoSergio PootAinda não há avaliações
- Gestion de La CalidadDocumento3 páginasGestion de La CalidadDanielQCAinda não há avaliações
- Termodinámica Ejercicios PropuestosDocumento7 páginasTermodinámica Ejercicios PropuestosKevin Flores AlvarezAinda não há avaliações
- Ejercicios Tema 1-5Documento9 páginasEjercicios Tema 1-5friocarlos100% (1)
- Arquitectura de Un Amplpificador Operacional (1.1Documento22 páginasArquitectura de Un Amplpificador Operacional (1.1Oswaldo TrinidadAinda não há avaliações
- Controladores PID Clase A, B y CDocumento7 páginasControladores PID Clase A, B y CFaBro GsAinda não há avaliações
- Control Sistema LC y LADocumento10 páginasControl Sistema LC y LAAlex Cervantes Ramirez100% (6)
- AlcoholímetroDocumento7 páginasAlcoholímetroJaime David Sánchez DomínguezAinda não há avaliações
- Maritzel R. H Ejercicios Confort y Salud Calidad Del Ambiente en InterioresDocumento3 páginasMaritzel R. H Ejercicios Confort y Salud Calidad Del Ambiente en InterioresJuan Diego Sanchez UribeAinda não há avaliações
- Imprimmaterial Piezoelectrico y Piezo ResistivoDocumento14 páginasImprimmaterial Piezoelectrico y Piezo ResistivoSaul HMAinda não há avaliações
- Senoides y FasoresDocumento14 páginasSenoides y FasoresSamir SalazarAinda não há avaliações
- Teorema de Aronhold-KennedyDocumento6 páginasTeorema de Aronhold-KennedySebastian AcostaAinda não há avaliações
- Sensores y Transmisores AnalogicosDocumento12 páginasSensores y Transmisores AnalogicosAreas de Grado100% (5)
- Formulario Ejes Leccion 3Documento5 páginasFormulario Ejes Leccion 3Kevin VGAinda não há avaliações
- Deber 2.0Documento2 páginasDeber 2.0Dario ViteriAinda não há avaliações
- Prac 27Documento7 páginasPrac 27Yall GlezAinda não há avaliações
- Guía GedisDocumento25 páginasGuía GedisHelen Cardozo Serrano100% (1)
- Transmisores Inteligentes CapacitivosDocumento6 páginasTransmisores Inteligentes CapacitivosGaBgo Gar0% (1)
- Problemas de Transferencia de CalorDocumento3 páginasProblemas de Transferencia de CalorYadira Rangel de LazcanoAinda não há avaliações
- Examen Parcial No 1 - TermidinámicaDocumento3 páginasExamen Parcial No 1 - TermidinámicaGustavo SotilloAinda não há avaliações
- ServosDocumento6 páginasServosMaritza GaleanaAinda não há avaliações
- Sistemas de Segundo OrdenDocumento9 páginasSistemas de Segundo OrdenEdith Chavez LindosAinda não há avaliações
- PROYECTOS Finales 2013 Control-Analogico IDocumento17 páginasPROYECTOS Finales 2013 Control-Analogico IXavier ContrerasAinda não há avaliações
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109No EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Ainda não há avaliações
- Capacitacion - Uso de Escaleras MecánicasDocumento46 páginasCapacitacion - Uso de Escaleras MecánicasMarco Andres Cisneros VargasAinda não há avaliações
- Tercer - Nivel - Cedeño - Manuel - AntonioDocumento3 páginasTercer - Nivel - Cedeño - Manuel - AntonioIsaac OrdoñezAinda não há avaliações
- TituloDocumento2 páginasTituloevelynAinda não há avaliações
- Transferencias Directas 60Documento1 páginaTransferencias Directas 60Marco Andres Cisneros VargasAinda não há avaliações
- Vael-03-Vargas Alarcon Elvia Luzmila-Marzo-2023 2Documento19 páginasVael-03-Vargas Alarcon Elvia Luzmila-Marzo-2023 2Marco Andres Cisneros VargasAinda não há avaliações
- Registro de Asistencia EommtDocumento2 páginasRegistro de Asistencia EommtMarco Andres Cisneros VargasAinda não há avaliações
- Recopilar InformacionDocumento7 páginasRecopilar InformacionMarco Andres Cisneros VargasAinda não há avaliações
- Encuesta Marco CisnerosDocumento4 páginasEncuesta Marco CisnerosMarco Andres Cisneros VargasAinda não há avaliações
- Recopilar InformacionDocumento7 páginasRecopilar InformacionMarco Andres Cisneros VargasAinda não há avaliações
- MKT Brochure HG h5kb500Documento2 páginasMKT Brochure HG h5kb500Marco Andres Cisneros VargasAinda não há avaliações
- Reporte JasperDocumento1 páginaReporte JasperR-natto Samuel Robles AguirreAinda não há avaliações
- La Organizacion de La Defensa Militar de Un Estado Señorial Y El Potencial Belico de Un Noble A Mediados Del Siglo XVDocumento42 páginasLa Organizacion de La Defensa Militar de Un Estado Señorial Y El Potencial Belico de Un Noble A Mediados Del Siglo XVMarco Andres Cisneros VargasAinda não há avaliações
- Capacitacion - Uso Del AscensorDocumento30 páginasCapacitacion - Uso Del AscensorMarco Andres Cisneros VargasAinda não há avaliações
- Formulario de Datos Generales 2023Documento5 páginasFormulario de Datos Generales 2023Marco Andres Cisneros VargasAinda não há avaliações
- Cotización Automatizada Que Si FuncionaDocumento30 páginasCotización Automatizada Que Si FuncionaMarco Andres Cisneros VargasAinda não há avaliações
- COTIZACIÓN AUTOMATIZADA QUE SI FUNCIONA Con 16 ItemsDocumento39 páginasCOTIZACIÓN AUTOMATIZADA QUE SI FUNCIONA Con 16 ItemsMarco Andres Cisneros VargasAinda não há avaliações
- EncuestaDocumento4 páginasEncuestaMarco Andres Cisneros VargasAinda não há avaliações
- 00 Global Presentacion Sep 23Documento20 páginas00 Global Presentacion Sep 23Marco Andres Cisneros VargasAinda não há avaliações
- Catalogo Sertec Power Solutions Cia LtdaDocumento1 páginaCatalogo Sertec Power Solutions Cia LtdaMarco Andres Cisneros VargasAinda não há avaliações
- Cotización Rubén Sosa #1486Documento9 páginasCotización Rubén Sosa #1486Marco Andres Cisneros VargasAinda não há avaliações
- Cotizacion Herramientas EOMMTDocumento1 páginaCotizacion Herramientas EOMMTMarco Andres Cisneros VargasAinda não há avaliações
- Cotización AutomatizadaDocumento6 páginasCotización AutomatizadaMarco Andres Cisneros VargasAinda não há avaliações
- Aire AcondicionadoDocumento34 páginasAire AcondicionadoMarco Andres Cisneros VargasAinda não há avaliações
- Catalogo KohlerDocumento16 páginasCatalogo KohlerMarco Andres Cisneros VargasAinda não há avaliações
- Capacitacion Sistema CCTV Metro de Quito Parte 1 PelcoDocumento91 páginasCapacitacion Sistema CCTV Metro de Quito Parte 1 PelcoMarco Andres Cisneros VargasAinda não há avaliações
- Capacitacion - Uso Del AscensorDocumento30 páginasCapacitacion - Uso Del AscensorMarco Andres Cisneros VargasAinda não há avaliações
- Pedido 114-8381775-9521014 MARCO CISNEROSDocumento2 páginasPedido 114-8381775-9521014 MARCO CISNEROSMarco Andres Cisneros VargasAinda não há avaliações
- AUTOCAD ELECTRICOS, PONDEROSA (1) - ModelDocumento1 páginaAUTOCAD ELECTRICOS, PONDEROSA (1) - ModelMarco Andres Cisneros VargasAinda não há avaliações
- AUTOCAD ELECTRICOS, PONDEROSA (1) - ModelDocumento1 páginaAUTOCAD ELECTRICOS, PONDEROSA (1) - ModelMarco Andres Cisneros VargasAinda não há avaliações
- Pedido 114-8381775-9521014 MARCO CISNEROSDocumento2 páginasPedido 114-8381775-9521014 MARCO CISNEROSMarco Andres Cisneros VargasAinda não há avaliações
- PRACTICAdigitalDocumento4 páginasPRACTICAdigitalkevinAinda não há avaliações
- 3.capacitación SFV. On GridDocumento81 páginas3.capacitación SFV. On Gridjeanette matus100% (1)
- Leyes Fundamentales Maquinas Eléctricas Sesion 1Documento8 páginasLeyes Fundamentales Maquinas Eléctricas Sesion 1Luis Alberto Pesantes OcampoAinda não há avaliações
- LINEALIZACIÓNDocumento3 páginasLINEALIZACIÓNcarolina JimenezAinda não há avaliações
- Tema 4 Convertidores AcDocumento19 páginasTema 4 Convertidores AcvrioboAinda não há avaliações
- Inversor de Marcha Protección Del MotorDocumento3 páginasInversor de Marcha Protección Del MotorDaniel PaganoAinda não há avaliações
- Informe7-Resistencia Eléctrica en Un Conductor eléctrico-Fis132LHDocumento5 páginasInforme7-Resistencia Eléctrica en Un Conductor eléctrico-Fis132LHLeidy Laura Patzi TancaraAinda não há avaliações
- Informe CP 2023Documento10 páginasInforme CP 2023José Roberto Urrutia MeléndezAinda não há avaliações
- Los Rayos X - DifracciónDocumento59 páginasLos Rayos X - DifracciónNemoz ZrAinda não há avaliações
- Cap II Tipos de LamparasDocumento15 páginasCap II Tipos de LamparasShineferAinda não há avaliações
- Fribras OpticasDocumento23 páginasFribras OpticasFreddy Galileo Vega AcostupaAinda não há avaliações
- Aspectos Generales - Operación de Bancos de CapacitoresDocumento12 páginasAspectos Generales - Operación de Bancos de CapacitoresReynaldo Flores AncietaAinda não há avaliações
- Resistencia Incremental Del Diodo Zener2Documento4 páginasResistencia Incremental Del Diodo Zener2Natalia Salazar DíazAinda não há avaliações
- EVAU 2023 Junio Resuelto CarlosDocumento8 páginasEVAU 2023 Junio Resuelto CarlosethanAinda não há avaliações
- Unidad 3 - Tarea 4 - Metales y MetalurgiaDocumento14 páginasUnidad 3 - Tarea 4 - Metales y MetalurgiaAlberto Villamizar ParadaAinda não há avaliações
- Informe de Laboratorio Ing ManuelDocumento18 páginasInforme de Laboratorio Ing ManuelMecing A MichaelAinda não há avaliações
- 4-Cálculo de Conductores Eléctricos y CanalizacionesDocumento85 páginas4-Cálculo de Conductores Eléctricos y CanalizacionesJuanPabloSandoval100% (1)
- Sesion 22 MTXDocumento15 páginasSesion 22 MTXangela camilaAinda não há avaliações
- Ups Wpro+Documento1 páginaUps Wpro+JorgeEstebanParadaMuñozAinda não há avaliações
- Control de TemperaturaDocumento14 páginasControl de TemperaturaSantiago RoblesAinda não há avaliações
- SPDocumento88 páginasSPRoberto VeasAinda não há avaliações
- GRP1 Calculo IIDocumento3 páginasGRP1 Calculo IIalf.cancinoAinda não há avaliações
- Facultad de Ingeniería Mecánica Eléctrica Sistemas de Potencia EléctricaDocumento34 páginasFacultad de Ingeniería Mecánica Eléctrica Sistemas de Potencia EléctricaPaul Medina AgurtoAinda não há avaliações
- Segundo Parcial Fisica II - I - 2020Documento2 páginasSegundo Parcial Fisica II - I - 2020Marlon OrdoñezAinda não há avaliações
- Laboratorio 02 Medidas de La Variables Electrica en Ac 2023-0Documento31 páginasLaboratorio 02 Medidas de La Variables Electrica en Ac 2023-0Aleksandra Bellido0% (1)
- EMANUEL ALCARRAZ REVAZA-Proyecto Tacna SolarDocumento24 páginasEMANUEL ALCARRAZ REVAZA-Proyecto Tacna SolarFranckehimer Johannes Quesada FasanandoAinda não há avaliações
- 5 1 Esquemas de Proteccion para GeneradoresDocumento26 páginas5 1 Esquemas de Proteccion para GeneradoresOmarAinda não há avaliações
- 2022 - Física I - Cuadernillo de TrabajoDocumento107 páginas2022 - Física I - Cuadernillo de Trabajoelmatabuelitas300000Ainda não há avaliações
- Corriente y ResistenciaDocumento6 páginasCorriente y ResistenciaJennifer D. Balbontin Gutierrez0% (1)