Você também pode gostar
- Research Topics OfferedDocumento55 páginasResearch Topics OfferedschultzAinda não há avaliações
- DGLR JournalRanking PDFDocumento1 páginaDGLR JournalRanking PDFschultzAinda não há avaliações
- Weapon SystemsDocumento14 páginasWeapon SystemsschultzAinda não há avaliações
- Finite-Thrust Trajectory OptimizationDocumento14 páginasFinite-Thrust Trajectory OptimizationschultzAinda não há avaliações
- Aerospace Research TopicsDocumento27 páginasAerospace Research TopicsschultzAinda não há avaliações
- Design and SimulationDocumento116 páginasDesign and SimulationschultzAinda não há avaliações
- Psychometric Success Free Practice Tests PDFDocumento123 páginasPsychometric Success Free Practice Tests PDFIrene Diamantopoulou100% (1)
- Tzu Sun - Von Clausewitz General Carl - Machiavelli Niccolo - Jomini Baron de The Complete Art of War Start Publishing LLC 2013 PDFDocumento1.138 páginasTzu Sun - Von Clausewitz General Carl - Machiavelli Niccolo - Jomini Baron de The Complete Art of War Start Publishing LLC 2013 PDFschultzAinda não há avaliações
- Report OneDocumento57 páginasReport OneschultzAinda não há avaliações
- GMAT GuideDocumento62 páginasGMAT GuideschultzAinda não há avaliações
- Polito TemplateDocumento30 páginasPolito TemplateschultzAinda não há avaliações
- Dynamics and Adaptive Control For Stability Recovery PDFDocumento24 páginasDynamics and Adaptive Control For Stability Recovery PDFschultzAinda não há avaliações
- Psychometric Success Free Practice Tests PDFDocumento123 páginasPsychometric Success Free Practice Tests PDFIrene Diamantopoulou100% (1)
- Agard Ag 300 Vol 5Documento166 páginasAgard Ag 300 Vol 5schultzAinda não há avaliações
- MatLab Dev For Civil EngDocumento182 páginasMatLab Dev For Civil EngRyan SooknarineAinda não há avaliações
- Usntps FTM 108Documento845 páginasUsntps FTM 108MClarkAinda não há avaliações
- Pallett AircraftElectricalSystemsDocumento166 páginasPallett AircraftElectricalSystemswilsonlam2003100% (12)
- Avionics Question BankDocumento2 páginasAvionics Question BankschultzAinda não há avaliações
- Agard Flight Test Technique Series Volume 3 Part 1 Dynamic Systems Output Error ApproachDocumento186 páginasAgard Flight Test Technique Series Volume 3 Part 1 Dynamic Systems Output Error ApproachDavid RussoAinda não há avaliações
- AGARD FLIGHT TEST TECHNIQUE SERIES VOLUME 1 Calibration of Air Data Systems and Flow Direction SenosrsDocumento69 páginasAGARD FLIGHT TEST TECHNIQUE SERIES VOLUME 1 Calibration of Air Data Systems and Flow Direction SenosrsDavid RussoAinda não há avaliações
- Hugo Autonomous 2017Documento224 páginasHugo Autonomous 2017schultzAinda não há avaliações
- Modeling and Control of An AcDocumento76 páginasModeling and Control of An AcschultzAinda não há avaliações
- Gill in Matthew N 2016Documento61 páginasGill in Matthew N 2016schultzAinda não há avaliações
- (Donald T. Ward, Thomas W. Strganac) Introduction PDFDocumento340 páginas(Donald T. Ward, Thomas W. Strganac) Introduction PDFschultzAinda não há avaliações
- Algorithms of Scheduling Ac Landing ProblemDocumento92 páginasAlgorithms of Scheduling Ac Landing ProblemschultzAinda não há avaliações
- Develop A Robust Nonlinear ControllerDocumento153 páginasDevelop A Robust Nonlinear ControllerschultzAinda não há avaliações
- Development of Control StrategiesDocumento125 páginasDevelopment of Control StrategiesschultzAinda não há avaliações
- Maximum-Range Trajectories For An Unpowered..Documento196 páginasMaximum-Range Trajectories For An Unpowered..schultzAinda não há avaliações
- Controller Design of Lti SysDocumento70 páginasController Design of Lti SysschultzAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- Engineering Mechanics PPT 1Documento48 páginasEngineering Mechanics PPT 1muralikrishna1917100% (3)
- DocxDocumento16 páginasDocxDeepika PadukoneAinda não há avaliações
- Basic GD&T PDFDocumento236 páginasBasic GD&T PDFVinothkumar MAinda não há avaliações
- 5000 Satoshi ScriptDocumento3 páginas5000 Satoshi Scripthar08Ainda não há avaliações
- Relevance Feedback in Content Based Image Retrieval: A ReviewDocumento7 páginasRelevance Feedback in Content Based Image Retrieval: A ReviewDinh ThanhAinda não há avaliações
- Unit III Nurbs and Solid ModelingDocumento120 páginasUnit III Nurbs and Solid Modelingpalaniappan_pandian100% (1)
- Spe 199716 MSDocumento43 páginasSpe 199716 MSJamesAinda não há avaliações
- Method of Differentiation DPP - 7Documento3 páginasMethod of Differentiation DPP - 7tanayAinda não há avaliações
- Adding and Subtraction Fractions With Unlike DenominatorsDocumento2 páginasAdding and Subtraction Fractions With Unlike Denominatorsapi-291376922Ainda não há avaliações
- WJC Write-UpDocumento6 páginasWJC Write-Upapi-272099906Ainda não há avaliações
- A Miniature Cross-Coupled Wide Band Microstrip Bandpass FilterDocumento3 páginasA Miniature Cross-Coupled Wide Band Microstrip Bandpass FilterAnil Pandey100% (1)
- Srikanth External Lab AnswersDocumento19 páginasSrikanth External Lab AnswersKumar NaiduAinda não há avaliações
- Syllabus Mathematics in The Modern WorldDocumento19 páginasSyllabus Mathematics in The Modern WorldJham L. PatraAinda não há avaliações
- Tut2 PDFDocumento3 páginasTut2 PDFanshuljain226Ainda não há avaliações
- Kinematics AssignmentDocumento17 páginasKinematics AssignmentMadhu BabuAinda não há avaliações
- Problems and Solutions For Complex AnalysisDocumento259 páginasProblems and Solutions For Complex AnalysisMete Torun91% (34)
- Chemical Engineering Plant Economics MCQ Questions & Answers - Chemical EngineeringDocumento6 páginasChemical Engineering Plant Economics MCQ Questions & Answers - Chemical Engineeringsrinu02062Ainda não há avaliações
- 01 Mathematical Physics QBDocumento14 páginas01 Mathematical Physics QBMathan KalyanasundaramAinda não há avaliações
- 4 - 4 Kinematic Chains - DOF - DHDocumento24 páginas4 - 4 Kinematic Chains - DOF - DHADITYA BAKSHIAinda não há avaliações
- Chapter 7 QuestionsDocumento6 páginasChapter 7 QuestionsArnav Pareek0% (2)
- Panel Data AnalysisDocumento7 páginasPanel Data AnalysisJorge David MoralesAinda não há avaliações
- Data Coding TabulationDocumento20 páginasData Coding TabulationShwetank Sharma100% (2)
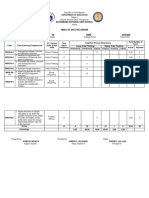
- Tos Math 8 3RD QuarterDocumento2 páginasTos Math 8 3RD Quarterrmm041550% (2)
- Acspl Software Guide Revision 3 00Documento353 páginasAcspl Software Guide Revision 3 00Zlatko Slavov50% (2)
- Reviewed Risk Theory NotesDocumento112 páginasReviewed Risk Theory Notesajami malalaAinda não há avaliações
- A Levels Physics Formula RelationshipDocumento8 páginasA Levels Physics Formula Relationships ramanAinda não há avaliações
- Process Synchronization and DeadlockDocumento41 páginasProcess Synchronization and DeadlockRemy Kuswara Putra KelanaAinda não há avaliações
- Chapter 2/number 61/problem Set 2.3 Ferris Wheel in 1897, A Ferris Wheel Was Built in Vienna That Still Stands Today. It Is Named TheDocumento3 páginasChapter 2/number 61/problem Set 2.3 Ferris Wheel in 1897, A Ferris Wheel Was Built in Vienna That Still Stands Today. It Is Named TheINKA VERANDERA NUGRAHAAinda não há avaliações
- Quiz 3 Hypothesis TestingDocumento7 páginasQuiz 3 Hypothesis TestingManoj MudirajAinda não há avaliações
- C DacDocumento3 páginasC DacAnsh Sharma0% (1)