Você também pode gostar
- The 44 Phonemes of English Chart PDFDocumento4 páginasThe 44 Phonemes of English Chart PDFArun Prasath100% (2)
- Adafruti Lesson 4 - Raspberry Pi GPIODocumento12 páginasAdafruti Lesson 4 - Raspberry Pi GPIOAiae Cadiz MadroneroAinda não há avaliações
- Raspberry Pi For Beginners: How to get the most out of your raspberry pi, including raspberry pi basics, tips and tricks, raspberry pi projects, and more!No EverandRaspberry Pi For Beginners: How to get the most out of your raspberry pi, including raspberry pi basics, tips and tricks, raspberry pi projects, and more!Ainda não há avaliações
- Audiometro 229 BDocumento193 páginasAudiometro 229 BMatias Ivan Toloza MoraAinda não há avaliações
- LTE Optimization and TroubleshootingDocumento200 páginasLTE Optimization and TroubleshootingardianAinda não há avaliações
- Raspberry GPIoDocumento21 páginasRaspberry GPIoRavikantAinda não há avaliações
- Raspberry WiringPiDocumento26 páginasRaspberry WiringPiMircea TirziuAinda não há avaliações
- Adafruits Raspberry Pi Lesson 4 Gpio Setup PDFDocumento15 páginasAdafruits Raspberry Pi Lesson 4 Gpio Setup PDFMardiyah AzzahraAinda não há avaliações
- Adafruits Raspberry Pi Lesson 4 Gpio Setup PDFDocumento22 páginasAdafruits Raspberry Pi Lesson 4 Gpio Setup PDFMuhammad Nur SururiAinda não há avaliações
- Controlling Multiple LEDs With Python and Your RasDocumento6 páginasControlling Multiple LEDs With Python and Your Raskutty vickyAinda não há avaliações
- IoT Practical ManualDocumento55 páginasIoT Practical ManualNitesh JadhavAinda não há avaliações
- 05 - LED BlinkingDocumento3 páginas05 - LED BlinkingShivaniAinda não há avaliações
- L.D. College of Engineering, Gujarat Technological UniversityDocumento10 páginasL.D. College of Engineering, Gujarat Technological UniversityBadshah ParmarAinda não há avaliações
- Pi RS485&CAN Module User Manual - V1.3Documento27 páginasPi RS485&CAN Module User Manual - V1.3saschaweissAinda não há avaliações
- IoT JournalDocumento57 páginasIoT Journallaxman gupttaAinda não há avaliações
- Adafruits Raspberry Pi Lesson 4 Gpio SetupDocumento12 páginasAdafruits Raspberry Pi Lesson 4 Gpio SetupAcad MartiAinda não há avaliações
- For Air PollutionDocumento25 páginasFor Air Pollutionsneha salunkeAinda não há avaliações
- Gpiozero Readthedocs Io en StableDocumento276 páginasGpiozero Readthedocs Io en Stableyugioh beeAinda não há avaliações
- Raspberry Practical Manual SachinDocumento49 páginasRaspberry Practical Manual SachinVaibhav KarambeAinda não há avaliações
- Adeept Ultimate Starter Kit For RPi ManualDocumento103 páginasAdeept Ultimate Starter Kit For RPi ManualJagadeesh Venugopal100% (1)
- RPi Low-Level PeripheralsDocumento31 páginasRPi Low-Level PeripheralssetidebaAinda não há avaliações
- QLC+ RaspberryPi Jessie GuideDocumento20 páginasQLC+ RaspberryPi Jessie GuideLuan SilasAinda não há avaliações
- ReceiverPiDDC 2Documento14 páginasReceiverPiDDC 2Bogdan DascaluAinda não há avaliações
- MR - Bond Ka AashirvadDocumento29 páginasMR - Bond Ka Aashirvad6109 Prashant GodheAinda não há avaliações
- Raspberry Pi: Led BlinkingDocumento38 páginasRaspberry Pi: Led BlinkingVishal ChoudharyAinda não há avaliações
- Raspberry Pi-LED BlinkDocumento42 páginasRaspberry Pi-LED BlinkVishal ChoudharyAinda não há avaliações
- Gpiozero Readthedocs Io en MasterDocumento243 páginasGpiozero Readthedocs Io en MasterDaniel MesiAinda não há avaliações
- Lab 05 - Eng - GPIO Sysfs V2.0Documento9 páginasLab 05 - Eng - GPIO Sysfs V2.0andrews.colin1977Ainda não há avaliações
- Lab: Blinking An Leds Using Python and Raspberry Pi: ObjectivesDocumento6 páginasLab: Blinking An Leds Using Python and Raspberry Pi: ObjectivesShakerAinda não há avaliações
- Raspberry Pi - Low-Level Peripherals (Elinux)Documento30 páginasRaspberry Pi - Low-Level Peripherals (Elinux)sher123Ainda não há avaliações
- Raspberry PiDocumento18 páginasRaspberry PiHarshit uppalAinda não há avaliações
- CrowPi User Manual PDFDocumento20 páginasCrowPi User Manual PDFIman GhoraiAinda não há avaliações
- Adafruits Raspberry Pi Lesson 4 Gpio SetupDocumento17 páginasAdafruits Raspberry Pi Lesson 4 Gpio SetupJuan BuitragoAinda não há avaliações
- Low Level RaspberryDocumento21 páginasLow Level RaspberryspeculumrotaeAinda não há avaliações
- HIFI DAC User ManualV1.4Documento41 páginasHIFI DAC User ManualV1.4veertulAinda não há avaliações
- 2019 MANUAL Raspberry Pi v.2Documento8 páginas2019 MANUAL Raspberry Pi v.2Ashfaq AhmedAinda não há avaliações
- Gpiozero PDFDocumento239 páginasGpiozero PDFSanthosh V PillaiAinda não há avaliações
- 1.3inch LCD HAT User ManualDocumento15 páginas1.3inch LCD HAT User Manualmagatsu2099Ainda não há avaliações
- Inplant Training ReportDocumento7 páginasInplant Training ReportGuruprasad S HegdeAinda não há avaliações
- LED Interfacing With RPi - 1Documento13 páginasLED Interfacing With RPi - 1NISHANT MADKEAinda não há avaliações
- Raspberry Pi - Expansion Boards (Elinux)Documento30 páginasRaspberry Pi - Expansion Boards (Elinux)sher123Ainda não há avaliações
- General Purpose Input/Output (GPIO)Documento6 páginasGeneral Purpose Input/Output (GPIO)sweetsureshAinda não há avaliações
- Raspberry PI ProjectDocumento16 páginasRaspberry PI ProjectAdnen BerradhiAinda não há avaliações
- Raspberry Pi4 Project Board User Manual VTUDocumento28 páginasRaspberry Pi4 Project Board User Manual VTULohit DalalAinda não há avaliações
- Getting Started With Raspberry Pi Pico W Using MicroPythonDocumento19 páginasGetting Started With Raspberry Pi Pico W Using MicroPythonthe.quote.villaAinda não há avaliações
- Beginning FPGA Programming - Partie74Documento5 páginasBeginning FPGA Programming - Partie74ali alilouAinda não há avaliações
- 50 IOT JournalDocumento47 páginas50 IOT JournalKaushal MishraAinda não há avaliações
- Raspberry Pi GuideDocumento60 páginasRaspberry Pi GuideHeryVandoroAinda não há avaliações
- Asus F9J - Rev 2.0 - SCDocumento63 páginasAsus F9J - Rev 2.0 - SCВиола БорисовскаяAinda não há avaliações
- Raspberry Pi ZeroDocumento215 páginasRaspberry Pi ZeroaielecAinda não há avaliações
- GPIO ZeroDocumento216 páginasGPIO ZeroHugo ErreAinda não há avaliações
- Datasheet OpenPiDocumento8 páginasDatasheet OpenPiSrinath KvAinda não há avaliações
- Raspberry Pi BScIT Practicals ManualDocumento64 páginasRaspberry Pi BScIT Practicals ManualSancheetAinda não há avaliações
- MagPi07 PDFDocumento32 páginasMagPi07 PDFBrian ClarksonAinda não há avaliações
- GpiozeroDocumento211 páginasGpiozeroCRISTIAN STIVEN ALMANZAR OROZCOAinda não há avaliações
- 2 RPI LED ControllingDocumento5 páginas2 RPI LED ControllingRohit GholapAinda não há avaliações
- 1.8inch LCD Module User Manual enDocumento7 páginas1.8inch LCD Module User Manual enAyush YadavAinda não há avaliações
- Eng 1.44inch LCD HAT - Waveshare WikiDocumento11 páginasEng 1.44inch LCD HAT - Waveshare Wiki0403DƯƠNG ĐỨC ĐẠMAinda não há avaliações
- LED Traffic Light ModuleDocumento17 páginasLED Traffic Light ModulecmdiAinda não há avaliações
- 3.5 Inch LCD For Raspberry PI User Manual: Design Service, Production ServiceDocumento19 páginas3.5 Inch LCD For Raspberry PI User Manual: Design Service, Production ServiceCBCEPFORSTAinda não há avaliações
- Introduction To Raspberry PIDocumento19 páginasIntroduction To Raspberry PIahmad jamelAinda não há avaliações
- MEAM - Design - ESP32 - Board Pinout & FunctionalityDocumento2 páginasMEAM - Design - ESP32 - Board Pinout & FunctionalityAlejandro CaceresAinda não há avaliações
- Advanced Raspberry Pi: Raspbian Linux and GPIO IntegrationNo EverandAdvanced Raspberry Pi: Raspbian Linux and GPIO IntegrationAinda não há avaliações
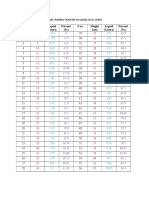
- S No. Height (CM) Liquid (Liters) Percent (%) S No. Height (CM) Liquid (Liters) Percent (%)Documento2 páginasS No. Height (CM) Liquid (Liters) Percent (%) S No. Height (CM) Liquid (Liters) Percent (%)FayazKhanPathanAinda não há avaliações
- Emily Dickinson To Susan GilbertDocumento1 páginaEmily Dickinson To Susan GilbertFayazKhanPathanAinda não há avaliações
- Angle Between SubspacesDocumento7 páginasAngle Between SubspacesFayazKhanPathanAinda não há avaliações
- CHEP Hospitol ProcedureDocumento2 páginasCHEP Hospitol ProcedureFayazKhanPathanAinda não há avaliações
- Gardner ThesisDocumento128 páginasGardner ThesisFayazKhanPathanAinda não há avaliações
- Discrete PID Controller: For Use in Robotics Project #3Documento10 páginasDiscrete PID Controller: For Use in Robotics Project #3FayazKhanPathanAinda não há avaliações
- Singular Value Decomposition - MIT PDFDocumento5 páginasSingular Value Decomposition - MIT PDFFayazKhanPathanAinda não há avaliações
- Matlab Fuzzy Toolbox TutorialDocumento42 páginasMatlab Fuzzy Toolbox TutorialFayazKhanPathanAinda não há avaliações
- Bode Stability CriterionDocumento1 páginaBode Stability CriterionFayazKhanPathanAinda não há avaliações
- Taulu JAP 05Documento10 páginasTaulu JAP 05FayazKhanPathanAinda não há avaliações
- Solving The Radial Part of The Laplacian Equation Using The Method of FrobeniusDocumento1 páginaSolving The Radial Part of The Laplacian Equation Using The Method of FrobeniusFayazKhanPathanAinda não há avaliações
- EulerDocumento2 páginasEulerFayazKhanPathanAinda não há avaliações
- Product Parameter: Details PDFDocumento1 páginaProduct Parameter: Details PDFAndrés Atlético Nacional BustamanteAinda não há avaliações
- Datalink Control Protocol 2Documento24 páginasDatalink Control Protocol 2Albert Kenneth Lupase UcangAinda não há avaliações
- Baofeng UV-5R Series Operating ManualDocumento19 páginasBaofeng UV-5R Series Operating ManualRogerAinda não há avaliações
- n187 Su800Documento2 páginasn187 Su800Andy SoenoewidjoyoAinda não há avaliações
- Class e InverterDocumento7 páginasClass e InverterskLam321Ainda não há avaliações
- Epson AcuLaser CX11 CX11F SM PDFDocumento683 páginasEpson AcuLaser CX11 CX11F SM PDFJaime RiosAinda não há avaliações
- 1970 MelchiorDocumento22 páginas1970 MelchiorHARSHIT AGRAWALAinda não há avaliações
- CMMT AS SW - 2018 06 - 8093861g1Documento672 páginasCMMT AS SW - 2018 06 - 8093861g1Nhan0% (1)
- Bi-Rite CatalogueDocumento24 páginasBi-Rite CatalogueBKWCoopAinda não há avaliações
- Characteristics of DSPDocumento15 páginasCharacteristics of DSPParesh SawantAinda não há avaliações
- Axoloti Supergran PatchDocumento3 páginasAxoloti Supergran PatchRJ BevyAinda não há avaliações
- Catálogo ACE 6000Documento4 páginasCatálogo ACE 6000Luis NovaisAinda não há avaliações
- PublicDocumento34 páginasPublicShree KanthAinda não há avaliações
- Smart Crop Protection System From Living Objects and Fire Using ArduinoDocumento5 páginasSmart Crop Protection System From Living Objects and Fire Using Arduinovaibhav tambe100% (1)
- Alarm CausesDocumento28 páginasAlarm CausesGovindaraju HSAinda não há avaliações
- Beyma Speakers Data Sheet Compression Driver CP755NdDocumento2 páginasBeyma Speakers Data Sheet Compression Driver CP755NdMichellAinda não há avaliações
- Automatic Load Sharing Power TransfermerDocumento59 páginasAutomatic Load Sharing Power Transfermerkidus ameroAinda não há avaliações
- Bode Handout PDFDocumento29 páginasBode Handout PDFSuhas ShirolAinda não há avaliações
- Atmel Avr Xmega DDocumento309 páginasAtmel Avr Xmega DRyosuke RaijiAinda não há avaliações
- Tutorial 3Documento14 páginasTutorial 3Rama DeviAinda não há avaliações
- Forward Biasing and Reverse Biasing of P N JunctionDocumento15 páginasForward Biasing and Reverse Biasing of P N JunctionAyushAinda não há avaliações
- Brosur Digital Menu BoardDocumento2 páginasBrosur Digital Menu BoardPT Innovasi Sarana Grafindo100% (1)
- Temperature Effects of Threshold in MOSDocumento20 páginasTemperature Effects of Threshold in MOSAvinash VenigallaAinda não há avaliações
- Current Measurements Using Shunt: Shunt Power Supply Load SideDocumento3 páginasCurrent Measurements Using Shunt: Shunt Power Supply Load SideAshish KumarAinda não há avaliações
- BD243CDocumento5 páginasBD243CMario RobertAinda não há avaliações
- Sony MDS-JB980Documento70 páginasSony MDS-JB980PhrenetykAinda não há avaliações
- 4095 256 (A)Documento1 página4095 256 (A)Yuri Alberto Noriega MoreAinda não há avaliações
- Fisher RS1060 RS1080Documento28 páginasFisher RS1060 RS1080Cco BogdanAinda não há avaliações