Você também pode gostar
- Practica (Parte 3) Geografia Plurinacional de BoliviaDocumento7 páginasPractica (Parte 3) Geografia Plurinacional de BoliviaKaril gabriela Lira VasquezAinda não há avaliações
- 2.remocion PisoDocumento1 página2.remocion PisosatinadorAinda não há avaliações
- ZAPATA AISLADADocumento12 páginasZAPATA AISLADAsatinadorAinda não há avaliações
- 2.inf AMB - MAY.JUNDocumento31 páginas2.inf AMB - MAY.JUNsatinadorAinda não há avaliações
- Cordon de Acera PDFDocumento1 páginaCordon de Acera PDFsatinadorAinda não há avaliações
- Remocion Piso de PiedraDocumento1 páginaRemocion Piso de PiedrasatinadorAinda não há avaliações
- Remocion Piso de Piedra PDFDocumento1 páginaRemocion Piso de Piedra PDFsatinadorAinda não há avaliações
- 1 ReplanteoDocumento1 página1 ReplanteosatinadorAinda não há avaliações
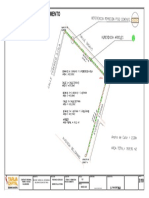
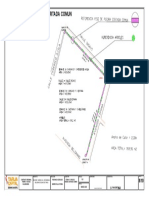
- 11 Alineamientodecordon PDFDocumento1 página11 Alineamientodecordon PDFsatinadorAinda não há avaliações
- 8 Pisopiedracortada PDFDocumento1 página8 Pisopiedracortada PDFsatinadorAinda não há avaliações
- 8 Pisopiedracortada PDFDocumento1 página8 Pisopiedracortada PDFsatinadorAinda não há avaliações
- Cordon de Acera PDFDocumento1 páginaCordon de Acera PDFsatinadorAinda não há avaliações
- Matriz Evaluación Impactos ConstruccionDocumento25 páginasMatriz Evaluación Impactos ConstruccionZilmer Muñoz VillalobosAinda não há avaliações
- 2.remocion PisoDocumento1 página2.remocion PisosatinadorAinda não há avaliações
- 11 Alineamientodecordon PDFDocumento1 página11 Alineamientodecordon PDFsatinadorAinda não há avaliações
- Reglamento - Contaminacion HidricaDocumento11 páginasReglamento - Contaminacion HidricaBrian ZambranaAinda não há avaliações
- 3 RemocionrepempeDocumento1 página3 RemocionrepempesatinadorAinda não há avaliações
- Hoja Excel para Diseño de Una Bocatoma Ing MSC Arbulú Ramos JoséDocumento99 páginasHoja Excel para Diseño de Una Bocatoma Ing MSC Arbulú Ramos Joséchicolokito19Ainda não há avaliações
- Calculo Paso Quebrada 20 0 MetrosDocumento6 páginasCalculo Paso Quebrada 20 0 MetrossatinadorAinda não há avaliações
- 33 Capilla PamapaDocumento1 página33 Capilla PamapasatinadorAinda não há avaliações
- 36 Esquema Hidraulico Sistema ActualDocumento1 página36 Esquema Hidraulico Sistema ActualsatinadorAinda não há avaliações
- Manual de HidráulicaDocumento53 páginasManual de HidráulicaJose AndresAinda não há avaliações
- Lineadeconduccion 150429131241 Conversion Gate01Documento32 páginasLineadeconduccion 150429131241 Conversion Gate01Víctor Choque FloresAinda não há avaliações
- Meteorología y ClimatologíaDocumento10 páginasMeteorología y ClimatologíaJO VEAinda não há avaliações
- Valores Del Nº de CurvaDocumento11 páginasValores Del Nº de CurvaRich IbañezAinda não há avaliações
- Caseta de Cloracion Replanteado. Granada PDFDocumento1 páginaCaseta de Cloracion Replanteado. Granada PDFJennifer Garcia RojasAinda não há avaliações
- CERCADODocumento2 páginasCERCADOLuis Miguel Toribio ReginoAinda não há avaliações
- 02 1741Documento134 páginas02 1741Antonio AmayaAinda não há avaliações
- Presentación Manual de Aplicacion APySA 02 03 18Documento30 páginasPresentación Manual de Aplicacion APySA 02 03 18satinadorAinda não há avaliações
- Manual Infraestructura Resiliente Agua Potable y SaneamientoDocumento67 páginasManual Infraestructura Resiliente Agua Potable y SaneamientosatinadorAinda não há avaliações
- Trazo de La Linea GradienteDocumento53 páginasTrazo de La Linea GradienteLiuBia Moron TapiaAinda não há avaliações
- La CircunferenciaDocumento12 páginasLa CircunferenciaAlexAinda não há avaliações
- Seccionamiento de Canal de Irrigacion, Pampa Del ArcoDocumento14 páginasSeccionamiento de Canal de Irrigacion, Pampa Del ArcoTony ConTreras FernandezAinda não há avaliações
- Unidad Didactica Matematica Rediseño - GDocumento143 páginasUnidad Didactica Matematica Rediseño - GMarco GonzálezAinda não há avaliações
- Ecuacion de La RectaDocumento4 páginasEcuacion de La RectaCRISTHIANJESUSAinda não há avaliações
- Matemática 1er. Curso Plan ComúnDocumento8 páginasMatemática 1er. Curso Plan ComúnWalter AriasAinda não há avaliações
- Tecsup C64Documento12 páginasTecsup C64Julio CescAinda não há avaliações
- 5-Cartografía Geológica Superficial para GeotecniaDocumento81 páginas5-Cartografía Geológica Superficial para GeotecniaIrene Beatriz Ramos MoraAinda não há avaliações
- Guia de Ejercicios para FuncionesDocumento9 páginasGuia de Ejercicios para FuncionesIvan Vargas BustamanteAinda não há avaliações
- GUÍA #4. Coordenadas, Rectas e IncrementosDocumento7 páginasGUÍA #4. Coordenadas, Rectas e IncrementosOctavio CharryAinda não há avaliações
- Módulo 2 Ecuaciones de La RectaDocumento4 páginasMódulo 2 Ecuaciones de La RectaDavid DuranAinda não há avaliações
- Derivadas Tema 07Documento61 páginasDerivadas Tema 07okaiusvestaAinda não há avaliações
- Matematica-Unidad 2Documento7 páginasMatematica-Unidad 2jorge lizarragaAinda não há avaliações
- Guia N°7Documento6 páginasGuia N°7Marcela SoteloAinda não há avaliações
- 2 - Función Afín, Lineal, Potencia y RaizDocumento15 páginas2 - Función Afín, Lineal, Potencia y RaizIgnacio Esteban Guajardo MoralesAinda não há avaliações
- Diseño de CunetasDocumento23 páginasDiseño de CunetasByron CorpusAinda não há avaliações
- Formas Funcionales de Los MRLDocumento36 páginasFormas Funcionales de Los MRLDavid Risco ChiroqueAinda não há avaliações
- Guia Funcion LinealDocumento2 páginasGuia Funcion LinealCarlos Guillermo Carrillo BolañosAinda não há avaliações
- Clase 2Documento31 páginasClase 2danielaAinda não há avaliações
- Aforo de Canales y TuberiasDocumento14 páginasAforo de Canales y TuberiasurielAinda não há avaliações
- Diseño de Canales de Evacuacion de Aguas LluviaDocumento9 páginasDiseño de Canales de Evacuacion de Aguas LluviapercypaulAinda não há avaliações
- 1.1 Funciones Lineales y AfinesDocumento2 páginas1.1 Funciones Lineales y Afinesjorge navarroAinda não há avaliações
- D) Matriz 6 - Tabla de Valores de La ProblemáticaDocumento3 páginasD) Matriz 6 - Tabla de Valores de La ProblemáticaJenny Bieb'sAinda não há avaliações
- Expediente de Una CarreteraDocumento15 páginasExpediente de Una CarreteraAlcidesRolandoSuclleHuisaAinda não há avaliações
- Matematicas IIIDocumento12 páginasMatematicas IIIMARTIN MAURICIO GOMEZ JIMENEZAinda não há avaliações
- Ecuaciones de La Recta en El Plano CartesianoDocumento33 páginasEcuaciones de La Recta en El Plano CartesianoMarko GrzAinda não há avaliações
- Sem 6 Polares Transf CoordenadasDocumento63 páginasSem 6 Polares Transf CoordenadasCarAinda não há avaliações
- II Unidad - Prueba de Funciones I MedioDocumento4 páginasII Unidad - Prueba de Funciones I MedioJaime TobarAinda não há avaliações
- Rectas y PlanosDocumento9 páginasRectas y PlanosAlbano FoschiattiAinda não há avaliações
- 11 FisicaDocumento49 páginas11 Fisicaalonso estevezAinda não há avaliações