Você também pode gostar
- EcuacionesDocumento2 páginasEcuacionesStoneAinda não há avaliações
- ETF 05 Turbomáquinas 2017-18 PDFDocumento84 páginasETF 05 Turbomáquinas 2017-18 PDFStoneAinda não há avaliações
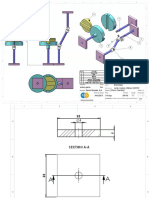
- Planos PuenteDocumento1 páginaPlanos PuenteStoneAinda não há avaliações
- TecnocuttinggDocumento4 páginasTecnocuttinggStoneAinda não há avaliações
- Estática UNI: principios de equilibrio y diagramas de cuerpo libreDocumento4 páginasEstática UNI: principios de equilibrio y diagramas de cuerpo libreJuan Carlos Ilasaca Calle0% (1)
- Problemas HormigonDocumento11 páginasProblemas HormigonStoneAinda não há avaliações
- Tema 2 Cargas TérmicasDocumento17 páginasTema 2 Cargas TérmicasStoneAinda não há avaliações
- Pieza SujecciónDocumento1 páginaPieza SujecciónStoneAinda não há avaliações
- Problemas Acondicionamiento AireDocumento13 páginasProblemas Acondicionamiento AireStoneAinda não há avaliações
- Problemas ConstruccionesDocumento10 páginasProblemas ConstruccionesStoneAinda não há avaliações
- Apuntes Construcciones Nuria - 20190704 - 0001 PDFDocumento66 páginasApuntes Construcciones Nuria - 20190704 - 0001 PDFStoneAinda não há avaliações
- Junta Cardan OldhanDocumento7 páginasJunta Cardan OldhanStoneAinda não há avaliações
- Tema 1 Termica y FluidosDocumento26 páginasTema 1 Termica y FluidosStoneAinda não há avaliações
- Fondo Soberano Modelo NoruegoDocumento12 páginasFondo Soberano Modelo NoruegoStoneAinda não há avaliações
- Problemas Ingenieria TermicaDocumento8 páginasProblemas Ingenieria TermicaStoneAinda não há avaliações
- Problemas Ingenieria TermicaDocumento28 páginasProblemas Ingenieria TermicaStoneAinda não há avaliações
- Vibration Testing FundamentalsDocumento19 páginasVibration Testing FundamentalsStoneAinda não há avaliações
- Resumen Organizacion de EmpresasDocumento17 páginasResumen Organizacion de EmpresasStoneAinda não há avaliações
- Instalaciones ElectricasDocumento3 páginasInstalaciones ElectricasStoneAinda não há avaliações
- Vibration Testing FundamentalsDocumento19 páginasVibration Testing FundamentalsStoneAinda não há avaliações
- Preguntaas QuimicaDocumento5 páginasPreguntaas QuimicaStoneAinda não há avaliações
- Memoria Easy HandDocumento2 páginasMemoria Easy HandStoneAinda não há avaliações
- Vibration TestingDocumento24 páginasVibration TestingStoneAinda não há avaliações
- Control de Calidad y Procesos IndustrialesDocumento4 páginasControl de Calidad y Procesos IndustrialesStoneAinda não há avaliações
- Bomba de CalorDocumento4 páginasBomba de CalorStoneAinda não há avaliações
- Tecnologia de Maquinas RepasoDocumento11 páginasTecnologia de Maquinas RepasoStoneAinda não há avaliações
- Vibration Testing FundamentalsDocumento19 páginasVibration Testing FundamentalsStoneAinda não há avaliações
- Preguntas QuimicaDocumento18 páginasPreguntas QuimicaStoneAinda não há avaliações
- Vibration Testing FundamentalsDocumento19 páginasVibration Testing FundamentalsStoneAinda não há avaliações
- CuestionarioDocumento5 páginasCuestionarioAry SanchezAinda não há avaliações
- PLANILLA PAC 2022 WebDocumento11 páginasPLANILLA PAC 2022 WebGISSELLE SOLIZ NOGALESAinda não há avaliações
- Manual UsuarioDocumento10 páginasManual Usuariosabino zarAinda não há avaliações
- Jose Miguel SD Wan PDFDocumento33 páginasJose Miguel SD Wan PDFdavid leonardo vargas ovalleAinda não há avaliações
- Actividad de Puntos Evaluables - Escenario 5)Documento6 páginasActividad de Puntos Evaluables - Escenario 5)Contabilidad LA NACIONALAinda não há avaliações
- Ejercicios Resueltos de Analisis NumericoDocumento12 páginasEjercicios Resueltos de Analisis NumericoMartin CasasAinda não há avaliações
- Gestión Calidad DocumentosDocumento22 páginasGestión Calidad DocumentosAndrés PacompíaAinda não há avaliações
- 308 (T7) - D6AM014PP0 - 2 - 26 11 2019 - Telecodificado Cajetín Telemático RT3 - RT4 - RT5Documento7 páginas308 (T7) - D6AM014PP0 - 2 - 26 11 2019 - Telecodificado Cajetín Telemático RT3 - RT4 - RT5Tomas Rodriguez salasAinda não há avaliações
- Tarea 4Documento2 páginasTarea 4Carlos tevexAinda não há avaliações
- 2.9.2 Lab - Basic Switch and End Device ConfigurationDocumento3 páginas2.9.2 Lab - Basic Switch and End Device ConfigurationDaniel CórdovaAinda não há avaliações
- Manual de Identidad USALDocumento272 páginasManual de Identidad USALAntonio DiuAinda não há avaliações
- Cuenca Balanza Ruben PerfilDocumento16 páginasCuenca Balanza Ruben PerfiljadielAinda não há avaliações
- b5 b50 13 Analista ProgramadorDocumento6 páginasb5 b50 13 Analista Programadorge reAinda não há avaliações
- Práctica 3 - Comunicación en equipos ágilesDocumento4 páginasPráctica 3 - Comunicación en equipos ágilesYonaigris Michelle Matos CorderoAinda não há avaliações
- 2020 Nicolas MantillaDocumento25 páginas2020 Nicolas MantillaSugexsAinda não há avaliações
- Catálogo Irisbond 2019Documento17 páginasCatálogo Irisbond 2019Belén MoralesAinda não há avaliações
- Informe Potencia Al Eje Gabriel Sana PDFDocumento18 páginasInforme Potencia Al Eje Gabriel Sana PDFFernando123456Ainda não há avaliações
- Curso ContometriaDocumento29 páginasCurso ContometriaJhulio Raphael Chávez Pisco100% (1)
- Tarea N°11-B1Documento9 páginasTarea N°11-B1HAYDEE ESTEFANY SALDAÑA RODRIGUEZAinda não há avaliações
- MCKI DFXseriesDocumento37 páginasMCKI DFXseriesCesar SalazarAinda não há avaliações
- Evaluación de Riesgo de Falla en Proyectos HidráulicosDocumento6 páginasEvaluación de Riesgo de Falla en Proyectos HidráulicosRobert YeisonAinda não há avaliações
- Comandos generales de manejo de archivos en Autodesk y sistemas de coordenadas en RevitDocumento12 páginasComandos generales de manejo de archivos en Autodesk y sistemas de coordenadas en RevitEna Ortiz GamboaAinda não há avaliações
- R Studio para análisis de datosDocumento29 páginasR Studio para análisis de datosIbarra SilAinda não há avaliações
- ABC Banco de Instructores SENA 2022Documento11 páginasABC Banco de Instructores SENA 2022Cristina PérezAinda não há avaliações
- Comercio ElectronicoDocumento7 páginasComercio ElectronicoKenny SolerAinda não há avaliações
- Datos Del EstudianteDocumento1 páginaDatos Del EstudianteBrayan Irigoin FernándezAinda não há avaliações
- Tutorial OPENSHOT FINAL PDFDocumento31 páginasTutorial OPENSHOT FINAL PDFLuis SanchezAinda não há avaliações
- Ejercicios Raptor Fundamentos de Programacion CompressDocumento26 páginasEjercicios Raptor Fundamentos de Programacion CompressblackcelfesAinda não há avaliações
- SamoaDocumento22 páginasSamoaLuis Segovia CortesAinda não há avaliações
- FAQ's - Tema 4.2Documento6 páginasFAQ's - Tema 4.2AndresitoititoAinda não há avaliações