Você também pode gostar
- El HapticoDocumento2 páginasEl HapticoCarlos PilatasigAinda não há avaliações
- Clasificación Por Medio de Colores Lynxmotion - Jiménes - PilatasigDocumento18 páginasClasificación Por Medio de Colores Lynxmotion - Jiménes - PilatasigCarlos PilatasigAinda não há avaliações
- Record AcadémicoDocumento6 páginasRecord AcadémicoCarlos PilatasigAinda não há avaliações
- Conceptos de Manufactura y ProducciónDocumento10 páginasConceptos de Manufactura y ProducciónCarlos PilatasigAinda não há avaliações
- Sistemas de Integración Vertical y HorizontalDocumento4 páginasSistemas de Integración Vertical y HorizontalCarlos PilatasigAinda não há avaliações
- GestionDocumento3 páginasGestionCarlos PilatasigAinda não há avaliações
- DEBER - Pilatasig Juan PDFDocumento9 páginasDEBER - Pilatasig Juan PDFCarlos PilatasigAinda não há avaliações
- Conceptos de Manufactura y ProducciónDocumento10 páginasConceptos de Manufactura y ProducciónCarlos PilatasigAinda não há avaliações
- Sistemas de Integración Vertical y HorizontalDocumento4 páginasSistemas de Integración Vertical y HorizontalCarlos PilatasigAinda não há avaliações
- Metodos de Implementacion de Un PIDDocumento7 páginasMetodos de Implementacion de Un PIDCarlos PilatasigAinda não há avaliações
- Grafcet EstructuradoDocumento3 páginasGrafcet EstructuradoCarlos PilatasigAinda não há avaliações
- PotenciaDocumento8 páginasPotenciaCarlos PilatasigAinda não há avaliações
- Sistemas de Integración Vertical y HorizontalDocumento4 páginasSistemas de Integración Vertical y HorizontalCarlos PilatasigAinda não há avaliações
- Inteligencia ArtificialDocumento5 páginasInteligencia ArtificialCarlos PilatasigAinda não há avaliações
- Oleo Hidráulica Oleo NeumáticaDocumento12 páginasOleo Hidráulica Oleo NeumáticaCarlos PilatasigAinda não há avaliações
- Pilatasig Pracitca2 2480Documento18 páginasPilatasig Pracitca2 2480Carlos PilatasigAinda não há avaliações
- Manual de OperacionDocumento6 páginasManual de OperacionCarlos PilatasigAinda não há avaliações
- GestionDocumento3 páginasGestionCarlos PilatasigAinda não há avaliações
- Manual de Mantenimiento.Documento5 páginasManual de Mantenimiento.Carlos PilatasigAinda não há avaliações
- Sistemas Hidráulicos y NeumáticosDocumento5 páginasSistemas Hidráulicos y NeumáticosCarlos PilatasigAinda não há avaliações
- Pilatasig Pracitca2 2480Documento18 páginasPilatasig Pracitca2 2480Carlos PilatasigAinda não há avaliações
- Segundo Parcial Practica1Documento18 páginasSegundo Parcial Practica1Carlos PilatasigAinda não há avaliações
- Daq 2480Documento19 páginasDaq 2480Carlos PilatasigAinda não há avaliações
- Industry 4.0Documento2 páginasIndustry 4.0Carlos PilatasigAinda não há avaliações
- Proyect Control DigitalDocumento13 páginasProyect Control DigitalCarlos PilatasigAinda não há avaliações
- Manual PLDDocumento19 páginasManual PLDCarlos PilatasigAinda não há avaliações
- Maker HubDocumento7 páginasMaker HubCarlos PilatasigAinda não há avaliações
- ExamenDocumento2 páginasExamenCarlos PilatasigAinda não há avaliações
- Examen GrafcetDocumento11 páginasExamen GrafcetCarlos PilatasigAinda não há avaliações
- Cuadro Comparativo de Procesadores AMDDocumento7 páginasCuadro Comparativo de Procesadores AMDSaturnino MoralesAinda não há avaliações
- Intro A Simulink PDFDocumento23 páginasIntro A Simulink PDFNelson Ubaldo Quispe MAinda não há avaliações
- Quien Se Ha Llevado Mi QuesoDocumento1 páginaQuien Se Ha Llevado Mi Quesoirley_99Ainda não há avaliações
- Cubierta PlanaDocumento2 páginasCubierta PlanaIvanaAinda não há avaliações
- Ser Una Analista de DatosDocumento3 páginasSer Una Analista de DatosEduardo del Cid SotoAinda não há avaliações
- Evidencia Informe Final Juan Camilo Mayo 2021Documento24 páginasEvidencia Informe Final Juan Camilo Mayo 2021Esteban JaimeAinda não há avaliações
- Ruta CriticaDocumento47 páginasRuta CriticaJohn Fredy Calderon GarciaAinda não há avaliações
- Kaspersky Security For VirtualizationDocumento19 páginasKaspersky Security For VirtualizationjuanitoAinda não há avaliações
- Modificación Del Escape de Clavijas. Enrique BuenoDocumento14 páginasModificación Del Escape de Clavijas. Enrique BuenorhgnicanorAinda não há avaliações
- Instalacion en EdificiosDocumento6 páginasInstalacion en EdificiosPablo José Farfan Guerrero0% (1)
- Parcial Gerencia de ProducciónDocumento14 páginasParcial Gerencia de ProducciónCamilo Gomez86% (7)
- Ejercicios de Modelo Keynesiano SimpleDocumento12 páginasEjercicios de Modelo Keynesiano SimpleFranklin Vargast IneoAinda não há avaliações
- Guia de Actividades y Rubrica de Evaluacion - Fase 4 - Diagnostico Participativo Contextualizado e Informe PsicologicoDocumento7 páginasGuia de Actividades y Rubrica de Evaluacion - Fase 4 - Diagnostico Participativo Contextualizado e Informe PsicologicoMarly DuarteAinda não há avaliações
- 01 ANAC Mercado Automotor Enero 2022Documento14 páginas01 ANAC Mercado Automotor Enero 2022jcgodoyf8985Ainda não há avaliações
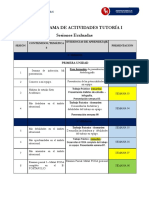
- Cronograma de Actividades Tutoría IDocumento2 páginasCronograma de Actividades Tutoría IYennifer Venicia Peralta PalaciosAinda não há avaliações
- Plan Contable GubernamentalDocumento29 páginasPlan Contable GubernamentalYon castillo quispeAinda não há avaliações
- BORRADORDocumento20 páginasBORRADORCamila Celis GutiérrezAinda não há avaliações
- PC02 AmbienteyMineriaDocumento17 páginasPC02 AmbienteyMineriaBruno Estela ObregonAinda não há avaliações
- Primer Mensaje A La Legislatura Del Gobernador Amadeo Sabattini 1936Documento12 páginasPrimer Mensaje A La Legislatura Del Gobernador Amadeo Sabattini 1936Marcos FunesAinda não há avaliações
- 02 Ejercicio Riesgo de LiquidezDocumento4 páginas02 Ejercicio Riesgo de LiquidezGuillermo Jose MansillaAinda não há avaliações
- Ee FFDocumento17 páginasEe FFMaricela Laureano RaquiAinda não há avaliações
- Recurso de Reposicion CalificacionDocumento9 páginasRecurso de Reposicion CalificacionhernanAinda não há avaliações
- 59 Estrategias Gestión de ResiduosDocumento6 páginas59 Estrategias Gestión de ResiduosZetabarri FKAinda não há avaliações
- Cronograma Actualizado Administración Estratégica D 2020-1 Prof. Roberto Paiva PDFDocumento1 páginaCronograma Actualizado Administración Estratégica D 2020-1 Prof. Roberto Paiva PDFSanchez Salazar Diego MartinAinda não há avaliações
- La Importancia de Las NIIF en El Proceso de Toma de Decisiones GerencialesDocumento3 páginasLa Importancia de Las NIIF en El Proceso de Toma de Decisiones GerencialesManuel MorenoAinda não há avaliações
- Formulario RH1 UNIFICADODocumento1 páginaFormulario RH1 UNIFICADOPaula SinisterraAinda não há avaliações
- Eco SoapDocumento3 páginasEco SoapFrida Gtz'Ainda não há avaliações
- Modelo de Plan de Aseguramiento de CalidadDocumento22 páginasModelo de Plan de Aseguramiento de CalidadCarlos Arturo Blandón JaramilloAinda não há avaliações
- Leasing InternacionalDocumento2 páginasLeasing InternacionalManuel Escobar100% (1)