Você também pode gostar
- UNIDAD 1. Control ClasicoDocumento13 páginasUNIDAD 1. Control ClasicoJoaquin Celaya GarciaAinda não há avaliações
- Actividad Fundamental 6-1723100Documento9 páginasActividad Fundamental 6-1723100Cindy GonzálezAinda não há avaliações
- Módulo 3 - Lectura 1Documento9 páginasMódulo 3 - Lectura 1mariela mmascelloniAinda não há avaliações
- Proyecto CT II 20201 PDFDocumento9 páginasProyecto CT II 20201 PDFDaniel BoteroAinda não há avaliações
- Controlador Modelo RefDocumento22 páginasControlador Modelo RefKarlos RamirezAinda não há avaliações
- 33 Control IiDocumento14 páginas33 Control IiPt farrgiAinda não há avaliações
- Sintonizacion de ControladoresDocumento25 páginasSintonizacion de ControladoresJuankSalazarAinda não há avaliações
- Informe Proyecto Final Teoria de Control IDocumento9 páginasInforme Proyecto Final Teoria de Control IFanny FloresAinda não há avaliações
- Tarea 8 Proyecto Equipo Toluca-VillahermosaDocumento6 páginasTarea 8 Proyecto Equipo Toluca-Villahermosajonathan rocheAinda não há avaliações
- Analisis y Diseño Controlador RetroalimentadoDocumento17 páginasAnalisis y Diseño Controlador RetroalimentadoEdGar TorresAinda não há avaliações
- 3.2 Sintonizaciòn de ControladoresDocumento19 páginas3.2 Sintonizaciòn de ControladoresAlma Crystell Gómez MontejoAinda não há avaliações
- Tecnicas de Control ClasicoDocumento11 páginasTecnicas de Control ClasicoYelibeth BoraureAinda não há avaliações
- Unidad III y IV Teoria y Asignacion (Autoguardado)Documento25 páginasUnidad III y IV Teoria y Asignacion (Autoguardado)kirito bassAinda não há avaliações
- Sintonización Del ControladorDocumento18 páginasSintonización Del ControladorWellintong Orlando SalanAinda não há avaliações
- Algoritmo de ControlDocumento46 páginasAlgoritmo de Controlankatu05Ainda não há avaliações
- Qué Es Control - MergedDocumento74 páginasQué Es Control - Mergedjhon.simba2014Ainda não há avaliações
- Lazo Abierto Lazo CerradoDocumento23 páginasLazo Abierto Lazo CerradoCristhian Alcocer PolancoAinda não há avaliações
- Controladores PidDocumento15 páginasControladores PidAaron MedinaAinda não há avaliações
- Producto Integrador de Aprendizaje: Materia: Tópicos Selectos de Control Maestro: Ernesto Zambrano SerranoDocumento21 páginasProducto Integrador de Aprendizaje: Materia: Tópicos Selectos de Control Maestro: Ernesto Zambrano SerranoVictor MartinezAinda não há avaliações
- Introducción A Los Controladores PIDDocumento24 páginasIntroducción A Los Controladores PIDVictor ReyesAinda não há avaliações
- Unidad 1. Conceptos Básicos de ControlDocumento7 páginasUnidad 1. Conceptos Básicos de ControlSaul Perez PerezAinda não há avaliações
- Pid InformeDocumento24 páginasPid InformeCarlos Alborta Caballero100% (1)
- Terminología y Definiciones Básicas PDFDocumento4 páginasTerminología y Definiciones Básicas PDFYohelis ZapataAinda não há avaliações
- Instrumentación - Introducción y Características EstáticasDocumento9 páginasInstrumentación - Introducción y Características EstáticasClaudia NavarroAinda não há avaliações
- Actividad 3 Sistemas de ControlDocumento9 páginasActividad 3 Sistemas de ControlJeziel TovarAinda não há avaliações
- Lab 4 Control 1Documento21 páginasLab 4 Control 1Andoni Palaco SalcedoAinda não há avaliações
- Co Af2Documento5 páginasCo Af2Marco ContrerasAinda não há avaliações
- RefuerzoDocumento35 páginasRefuerzoRed SoldierAinda não há avaliações
- Trabajo Final (Pendulo de Furuta) - Control Automatico IIDocumento21 páginasTrabajo Final (Pendulo de Furuta) - Control Automatico IIAnthonny Monrroy RodriguezAinda não há avaliações
- Control Avanzado Lab2 InformeDocumento20 páginasControl Avanzado Lab2 InformeBranco Costa OrtegaAinda não há avaliações
- Practica 5 Sintonía de Los ControladoresDocumento29 páginasPractica 5 Sintonía de Los ControladoresJaneth ReyesAinda não há avaliações
- Glosario de ControlDocumento6 páginasGlosario de Controlaiki_calli100% (1)
- Conceptos Básicos: Agradecimiento y Reconocimiento Al Profesor Efraín Grisales U AutónomaDocumento65 páginasConceptos Básicos: Agradecimiento y Reconocimiento Al Profesor Efraín Grisales U AutónomaChristopher Nicolas A. Illanes FernandezAinda não há avaliações
- Introducion Teoria de Control 01Documento36 páginasIntroducion Teoria de Control 01Huanca Mamani Yessica LauraAinda não há avaliações
- Construccion de Un ControladorDocumento7 páginasConstruccion de Un ControladorCarlos SanchezAinda não há avaliações
- Actividad Fundamental 2Documento6 páginasActividad Fundamental 2Marco ContrerasAinda não há avaliações
- Preguntas Controlador PIDDocumento6 páginasPreguntas Controlador PIDZamaria Hernandez Arroyo100% (1)
- Sistemas AutomáticosDocumento12 páginasSistemas Automáticosbasi basiAinda não há avaliações
- Glosario Plantas QuimicasDocumento6 páginasGlosario Plantas QuimicasRubén Rueda AmayaAinda não há avaliações
- Transformadas de Laplace Aplicadas A Sistemas de ControlDocumento9 páginasTransformadas de Laplace Aplicadas A Sistemas de ControlRodrigo ValdezAinda não há avaliações
- Sistemas de ControlDocumento104 páginasSistemas de ControlNelson YucraAinda não há avaliações
- Que Es Un Sistema de ControlDocumento4 páginasQue Es Un Sistema de ControlomarAinda não há avaliações
- Unidad 1 Ingenieria de Control Clasico 1Documento22 páginasUnidad 1 Ingenieria de Control Clasico 1JORGESOLANOIEM100% (4)
- Técnicas de Control ClásicoDocumento63 páginasTécnicas de Control ClásicoPavel Osorio QuintanaAinda não há avaliações
- ControlautomaticoDocumento10 páginasControlautomaticoefrainAinda não há avaliações
- Tarea 3 - Grupo - 7Documento17 páginasTarea 3 - Grupo - 7UnadAinda não há avaliações
- Resumen - Sistemas de Control - Montoya EdwinDocumento5 páginasResumen - Sistemas de Control - Montoya EdwinEdwin MontoyaAinda não há avaliações
- Practica 1 de Control Automatico 1Documento10 páginasPractica 1 de Control Automatico 1carlosAinda não há avaliações
- Unidad Repaso Control 2Documento148 páginasUnidad Repaso Control 2Jorge Alejandro Sanchez Juarez100% (1)
- Ing Control Sesion2-3Documento105 páginasIng Control Sesion2-3HanniaAinda não há avaliações
- GRUPO 4 Sistemas de ControlDocumento3 páginasGRUPO 4 Sistemas de Controlxavier SAinda não há avaliações
- Sistemas de Control - Lazo Abierto - Lazo CerradoDocumento8 páginasSistemas de Control - Lazo Abierto - Lazo CerradoHiramSanchezHardyAinda não há avaliações
- Tarea 1Documento2 páginasTarea 1Carlos Alberto Flores HernandezAinda não há avaliações
- 3.6 SensibilidadDocumento3 páginas3.6 SensibilidadLuis Angel Reyes100% (1)
- Practica SERVOMECANISMO NEUMÁTICODocumento10 páginasPractica SERVOMECANISMO NEUMÁTICOClara CastilloAinda não há avaliações
- Estrategias de Control de ProcesosDocumento6 páginasEstrategias de Control de ProcesosChRiss CarvajalAinda não há avaliações
- Control PID para Un Motor DC Controlado Por ArmaduraDocumento17 páginasControl PID para Un Motor DC Controlado Por ArmaduraRicharson OchoaAinda não há avaliações
- Flipi Control InformeDocumento5 páginasFlipi Control InformeLUIS FERNANDO HOYOS CORREDORAinda não há avaliações
- Guía de Actividades y Rubrica de Evaluación - Fase 2 - Plan de MarketingDocumento7 páginasGuía de Actividades y Rubrica de Evaluación - Fase 2 - Plan de MarketingLuis Alberto GilAinda não há avaliações
- Diplomado CiscoDocumento51 páginasDiplomado CiscobussinessAinda não há avaliações
- Diplomado Cisco CCNPDocumento53 páginasDiplomado Cisco CCNPbussinessAinda não há avaliações
- Unidad 2 Paso 3 Javier SalazarDocumento5 páginasUnidad 2 Paso 3 Javier SalazarbussinessAinda não há avaliações
- Guia de Actividades y Rubrica de Evaluacion Tarea 2 - Analisis de LGR y Diseño de CompensadorDocumento13 páginasGuia de Actividades y Rubrica de Evaluacion Tarea 2 - Analisis de LGR y Diseño de Compensadordiana paola puentes pachecoAinda não há avaliações
- Tarea 1Documento7 páginasTarea 1bussinessAinda não há avaliações
- Guía de Actividades y Rúbrica de Evaluación - Tarea 2 - Dinámica y EnergíaDocumento13 páginasGuía de Actividades y Rúbrica de Evaluación - Tarea 2 - Dinámica y EnergíaJesús Ángel Garcia GonzalezAinda não há avaliações
- Guía de Actividades y Rúbrica de Evaluación - Paso 1 - Conceptualización y Fundamentación Teórica de Planeación y MarketingDocumento7 páginasGuía de Actividades y Rúbrica de Evaluación - Paso 1 - Conceptualización y Fundamentación Teórica de Planeación y MarketingAnonymous m6T5F1J0dAinda não há avaliações
- Guia de Actividades y Rúbrica de Evaluación - Fase 1 - Planeacion y Construccion de Un Trabajo Respecto Decisiones Bajo Un Entorno de RiesgoDocumento15 páginasGuia de Actividades y Rúbrica de Evaluación - Fase 1 - Planeacion y Construccion de Un Trabajo Respecto Decisiones Bajo Un Entorno de RiesgoAnonymous IG3Pj6AwAinda não há avaliações
- Tarea 1 Control AnalogoDocumento8 páginasTarea 1 Control AnalogobussinessAinda não há avaliações
- Maquetacion y Adaptacion de Imagen Corporativa Karl'sDocumento3 páginasMaquetacion y Adaptacion de Imagen Corporativa Karl'sbussinessAinda não há avaliações
- Control Analogo Tarea1 G22Documento14 páginasControl Analogo Tarea1 G22bussinessAinda não há avaliações
- Control AnalogoDocumento15 páginasControl AnalogobussinessAinda não há avaliações
- Fase 3Documento5 páginasFase 3bussinessAinda não há avaliações
- Tipos de Estrategias Que Utiliza Alpina para Lograr Los ObjetivosDocumento2 páginasTipos de Estrategias Que Utiliza Alpina para Lograr Los ObjetivosbussinessAinda não há avaliações
- Guía de Actividades y Rubrica de Evaluación - Fase 2-Diagnóstico y Posición CompetitivaDocumento18 páginasGuía de Actividades y Rubrica de Evaluación - Fase 2-Diagnóstico y Posición CompetitivabussinessAinda não há avaliações
- Guía de Actividades y Rúbrica de Evaluación - Paso 3 - Análisis de La InformaciónDocumento10 páginasGuía de Actividades y Rúbrica de Evaluación - Paso 3 - Análisis de La InformaciónJhoan MontoyaAinda não há avaliações
- Step 2Documento7 páginasStep 2bussinessAinda não há avaliações
- Guía de Actividades y Rúbrica de Evaluación Fase 3 Diseño y Construcción Resolver Problemas y Ejercicios Ecuaciones de Orden SuperiorDocumento20 páginasGuía de Actividades y Rúbrica de Evaluación Fase 3 Diseño y Construcción Resolver Problemas y Ejercicios Ecuaciones de Orden Superioryarid rodriguezAinda não há avaliações
- Abp Empresa Dulce Del Día PDFDocumento6 páginasAbp Empresa Dulce Del Día PDFAnonymous w4a1u3pwxn0% (1)
- Estructuras Condicionales AnidadasDocumento6 páginasEstructuras Condicionales AnidadasbussinessAinda não há avaliações
- Paso 1 - Reconocimiento Del CursoDocumento2 páginasPaso 1 - Reconocimiento Del CursobussinessAinda não há avaliações
- Guía de Actividades y Rúbrica de Evaluación - Fase 3 Preparar y Presentar Un Informe Con La Solución de Cada Uno de Los Modelos de Inventario ProbabilísticosDocumento18 páginasGuía de Actividades y Rúbrica de Evaluación - Fase 3 Preparar y Presentar Un Informe Con La Solución de Cada Uno de Los Modelos de Inventario ProbabilísticosbussinessAinda não há avaliações
- AP3-AA2-Ev2-Construir MER para Su Proyecto de Formación - FRDocumento3 páginasAP3-AA2-Ev2-Construir MER para Su Proyecto de Formación - FRbussinessAinda não há avaliações
- Fase 1 Jose Luis MartinezDocumento6 páginasFase 1 Jose Luis MartinezbussinessAinda não há avaliações
- Guía de Actividades y Rúbrica de Evaluación - Fase 1 - Reconocimiento de Contenidos y Pre Saberes Del CursoDocumento9 páginasGuía de Actividades y Rúbrica de Evaluación - Fase 1 - Reconocimiento de Contenidos y Pre Saberes Del CursoBRAYHAM CAMILO PARRA ALVARADOAinda não há avaliações
- Instructivo de Ayuda ComplementariaDocumento4 páginasInstructivo de Ayuda ComplementariabussinessAinda não há avaliações
- Anexo 1 Fase 3 - Axiomas de ProbabilidadDocumento7 páginasAnexo 1 Fase 3 - Axiomas de ProbabilidadMilena Salazar50% (2)
- Guía de Actividades y Rúbrica de Evaluación - Fase 3 - Axiomas de ProbabilidadDocumento13 páginasGuía de Actividades y Rúbrica de Evaluación - Fase 3 - Axiomas de ProbabilidadJhoser PulidoAinda não há avaliações
- Ag02b-Toma de DecisionesDocumento53 páginasAg02b-Toma de Decisionesalan165Ainda não há avaliações
- Relación IntraarcadaDocumento20 páginasRelación Intraarcadacamila0% (1)
- Carta de MenusDocumento6 páginasCarta de MenusIng. Leonardo ArellanoAinda não há avaliações
- Javier Aguirre FernándezDocumento4 páginasJavier Aguirre Fernándezjuancho usanavy marinaAinda não há avaliações
- Fundamentación JustificaciónDocumento4 páginasFundamentación JustificaciónAlonso TovarAinda não há avaliações
- Guia Met Caso Mantenimiento ElectrohidráulicoDocumento5 páginasGuia Met Caso Mantenimiento ElectrohidráulicoRenato BerriosAinda não há avaliações
- 2018-05-04 Furuta InformeDocumento9 páginas2018-05-04 Furuta Informeskrew_bassAinda não há avaliações
- Mantenimiento de Líneas de Transmisión de EnergíaDocumento6 páginasMantenimiento de Líneas de Transmisión de EnergíaEduardo Gamboa Marin100% (2)
- Laboratorio 4Documento24 páginasLaboratorio 4Jonathan Francisco Rojas MartínezAinda não há avaliações
- Revision ValerianaDocumento53 páginasRevision ValerianaJavier Andres Camo Jimenez100% (1)
- Informe Técnico Semana 3 (07-03-22) - (12-03-22) (Cheny)Documento6 páginasInforme Técnico Semana 3 (07-03-22) - (12-03-22) (Cheny)henry emerson barrueta aguirreAinda não há avaliações
- Recurso de Nulidad de NotificacionDocumento7 páginasRecurso de Nulidad de NotificacionFrank CácedaAinda não há avaliações
- 380 VcaDocumento34 páginas380 VcaEduardo CuraAinda não há avaliações
- Curso 4.erpDocumento95 páginasCurso 4.erpmariana torres chavezAinda não há avaliações
- Reporte Diario CapatazDocumento1 páginaReporte Diario CapatazErly Yahuana BerrúAinda não há avaliações
- Baremos Del STAIC tRANSFORMACION DE PUNTUACIONES PDFDocumento1 páginaBaremos Del STAIC tRANSFORMACION DE PUNTUACIONES PDFRuth Karina Ayudante BaldocedaAinda não há avaliações
- El Siga Como Una Mejora de Control en Los Procedimientos Administrativos y Patrimoniales en La Municipalidad Distrital de Pimentel 2021Documento25 páginasEl Siga Como Una Mejora de Control en Los Procedimientos Administrativos y Patrimoniales en La Municipalidad Distrital de Pimentel 2021Laurita GomezAinda não há avaliações
- Leonardo AtestiguamientoDocumento8 páginasLeonardo Atestiguamientoluissana_santelizAinda não há avaliações
- Tipos de Sanciones TributariasDocumento18 páginasTipos de Sanciones TributariasAleja ToroAinda não há avaliações
- MAPA MENTAL Sociologia y PsicologiaDocumento1 páginaMAPA MENTAL Sociologia y PsicologiaAlejandra QuinteroAinda não há avaliações
- Guia 3, OliveDocumento8 páginasGuia 3, OlivePam Padilla CruzadoAinda não há avaliações
- Texto ArgumentativoDocumento12 páginasTexto ArgumentativoAngela ChavezAinda não há avaliações
- FTT U1 Ea CegoDocumento4 páginasFTT U1 Ea CegoBrenda Diaz SierraAinda não há avaliações
- Presentación Reglamento Interno de TrabajoDocumento21 páginasPresentación Reglamento Interno de TrabajoMagali MorenoAinda não há avaliações
- Iphone 14 Pro Max 5G 256Gb: Características DestacadasDocumento1 páginaIphone 14 Pro Max 5G 256Gb: Características DestacadasFrancesca GallegosAinda não há avaliações
- Fundici 2)Documento4 páginasFundici 2)Ariadna VeraAinda não há avaliações
- Empresa Sesion 2Documento23 páginasEmpresa Sesion 2Alexander GutierrezAinda não há avaliações
- Tic 1 - G3 - TP FinalDocumento14 páginasTic 1 - G3 - TP FinalCaro FriedAinda não há avaliações
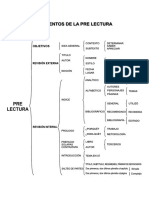
- Elementos de La Pre LecturaDocumento1 páginaElementos de La Pre LecturaFernando YzfAinda não há avaliações
- Protocolo de BioseguriddDocumento9 páginasProtocolo de BioseguriddMárolys LozanoAinda não há avaliações
- Cuadro Sinoptico Descripcion de CargosDocumento1 páginaCuadro Sinoptico Descripcion de Cargoseiling67% (6)