Você também pode gostar
- Op Amp Lab ReportDocumento21 páginasOp Amp Lab ReportArabEmirates67% (3)
- Colpitts Oscillator Using Op Amp - BJT Colpitts OscillatorDocumento3 páginasColpitts Oscillator Using Op Amp - BJT Colpitts Oscillatorliton_kabirAinda não há avaliações
- Op Amp Lab ReportDocumento21 páginasOp Amp Lab ReportArabEmirates67% (3)
- Characteristics of Double Planar Micro-Inductor With Patterned Nife Thin-Films For DC/DC IntegrationDocumento9 páginasCharacteristics of Double Planar Micro-Inductor With Patterned Nife Thin-Films For DC/DC Integrationliton_kabirAinda não há avaliações
- A Review of Microfiber and Nanofiber Based Optical Sensors PDFDocumento26 páginasA Review of Microfiber and Nanofiber Based Optical Sensors PDFliton_kabirAinda não há avaliações
- A Bendable and Wearable Cardiorespiratory Monitoring Device Fusing Two Noncontact Sensor PrinciplesDocumento10 páginasA Bendable and Wearable Cardiorespiratory Monitoring Device Fusing Two Noncontact Sensor Principlesliton_kabirAinda não há avaliações
- 10 5923 J Jlce 20160403 01Documento8 páginas10 5923 J Jlce 20160403 01liton_kabirAinda não há avaliações
- An Overview of Passive RFI PDFDocumento7 páginasAn Overview of Passive RFI PDFliton_kabirAinda não há avaliações
- 08447215Documento10 páginas08447215liton_kabirAinda não há avaliações
- MLX90129 Antenna Design Application Note MelexisDocumento9 páginasMLX90129 Antenna Design Application Note Melexisliton_kabirAinda não há avaliações
- Understanding Sensor Resolution Specifications and PerformanceDocumento6 páginasUnderstanding Sensor Resolution Specifications and PerformanceShri KulkarniAinda não há avaliações
- A Pressure Sensor Based On The Orientational Dependence of Plasmonic Properties of Gold Nanorods PDFDocumento6 páginasA Pressure Sensor Based On The Orientational Dependence of Plasmonic Properties of Gold Nanorods PDFliton_kabirAinda não há avaliações
- Colpitts Oscillator Calculation PDFDocumento3 páginasColpitts Oscillator Calculation PDFliton_kabirAinda não há avaliações
- Thermal Cycling Layer by Layer Dip Coating Method For Oxazine Formation On Clad Modified Optical Fiber CoreDocumento4 páginasThermal Cycling Layer by Layer Dip Coating Method For Oxazine Formation On Clad Modified Optical Fiber Coreliton_kabirAinda não há avaliações
- Sensors 18 03113Documento11 páginasSensors 18 03113liton_kabirAinda não há avaliações
- A MEMS Capacitive PH Sensor For High Acidic and Basic Solutions PDFDocumento3 páginasA MEMS Capacitive PH Sensor For High Acidic and Basic Solutions PDFliton_kabirAinda não há avaliações
- A Novel Technique For Optical Fiber PH Sensing Based On Methylene Blue Adsorption-2Documento8 páginasA Novel Technique For Optical Fiber PH Sensing Based On Methylene Blue Adsorption-2liton_kabirAinda não há avaliações
- A Novel Technique For Optical Fiber PH Sensing Based On Methylene Blue Adsorption-2Documento8 páginasA Novel Technique For Optical Fiber PH Sensing Based On Methylene Blue Adsorption-2liton_kabirAinda não há avaliações
- A Novel Technique For Optial Fiber PH Sensing Based On Methylen Blue Adsorption PDFDocumento8 páginasA Novel Technique For Optial Fiber PH Sensing Based On Methylen Blue Adsorption PDFliton_kabirAinda não há avaliações
- A Novel Technique For Optical Fiber PH Sensing Based On Methylene Blue Adsorption-2Documento8 páginasA Novel Technique For Optical Fiber PH Sensing Based On Methylene Blue Adsorption-2liton_kabirAinda não há avaliações
- A Novel Technique For Optical Fiber PH Sensing Based On Methylene Blue Adsorption-2Documento8 páginasA Novel Technique For Optical Fiber PH Sensing Based On Methylene Blue Adsorption-2liton_kabirAinda não há avaliações
- A Novel Technique For Optical Fiber PH Sensing Based On Methylene Blue Adsorption-2Documento8 páginasA Novel Technique For Optical Fiber PH Sensing Based On Methylene Blue Adsorption-2liton_kabirAinda não há avaliações
- A Novel Technique For Optical Fiber PH Sensing Based On Methylene Blue Adsorption-2Documento8 páginasA Novel Technique For Optical Fiber PH Sensing Based On Methylene Blue Adsorption-2liton_kabirAinda não há avaliações
- A MEMS Capacitive PH Sensor For High Acidic and Basic SolutionsDocumento3 páginasA MEMS Capacitive PH Sensor For High Acidic and Basic Solutionsliton_kabirAinda não há avaliações
- Variable Wavelength Surface Plasmon Resonance (SPR) in BiosensingDocumento5 páginasVariable Wavelength Surface Plasmon Resonance (SPR) in Biosensingliton_kabirAinda não há avaliações
- Basic Polarization Techniques and DevicesDocumento7 páginasBasic Polarization Techniques and Deviceszee887Ainda não há avaliações
- A Fiber Optic Ammonia Sensor Using A Universal PH IndicatorDocumento14 páginasA Fiber Optic Ammonia Sensor Using A Universal PH Indicatorliton_kabirAinda não há avaliações
- LM324Documento22 páginasLM324Muhammad HabibieAinda não há avaliações
- A Unified View of Propagating and Localized Surface PlasmonDocumento11 páginasA Unified View of Propagating and Localized Surface Plasmonliton_kabirAinda não há avaliações
- Development of Biosensor Chip For Clinical Diagnosis Using Surface Plasmon Resonance Imaging With Multi-MicrochannelsDocumento3 páginasDevelopment of Biosensor Chip For Clinical Diagnosis Using Surface Plasmon Resonance Imaging With Multi-Microchannelsliton_kabirAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- EEE-435 Lecture 1: Industrial SafetyDocumento20 páginasEEE-435 Lecture 1: Industrial SafetyShah SyedAinda não há avaliações
- Switch de PresiónDocumento2 páginasSwitch de PresiónCARLOS RAMOSAinda não há avaliações
- Polycrystalline Type VBMS250 255 260AE04Documento2 páginasPolycrystalline Type VBMS250 255 260AE04walter_lopezvAinda não há avaliações
- Basic Mechanical Engineering (Draw The PV Diagram in Each Problem)Documento2 páginasBasic Mechanical Engineering (Draw The PV Diagram in Each Problem)nidhul07Ainda não há avaliações
- AAI Junior Executive ATC Exam SyllabusDocumento2 páginasAAI Junior Executive ATC Exam Syllabusgexewaw568Ainda não há avaliações
- Gaussian Observation HMM For EEGDocumento9 páginasGaussian Observation HMM For EEGDeetovAinda não há avaliações
- D5035 11 Breaking Force and Elongation of Textile Fabrics (Strip Method)Documento8 páginasD5035 11 Breaking Force and Elongation of Textile Fabrics (Strip Method)Raj SontakkeAinda não há avaliações
- Advantages of Bladder Surge TanksDocumento8 páginasAdvantages of Bladder Surge TanksChrisHogbenAinda não há avaliações
- Measurements On Electric Installations in Theory and PracticeDocumento124 páginasMeasurements On Electric Installations in Theory and Practicebxteo100% (2)
- Hydraulics Products Guide enDocumento36 páginasHydraulics Products Guide enbee140676Ainda não há avaliações
- Railway Curves 7Documento21 páginasRailway Curves 7vpmohammedAinda não há avaliações
- Lab 2 Slotted Line and SWR MeterDocumento6 páginasLab 2 Slotted Line and SWR MeterFrew FrewAinda não há avaliações
- Ieee STD c37.06.1 - Guide For High-Voltage Circuit BreakersDocumento12 páginasIeee STD c37.06.1 - Guide For High-Voltage Circuit Breakerstatacps100% (2)
- Fundasurv Module 1Documento28 páginasFundasurv Module 1Kyle Henzy RiveraAinda não há avaliações
- Lpile Input ParametersDocumento1 páginaLpile Input ParametersKresno N SoetomoAinda não há avaliações
- Ijest NG Vol2 No2 Complete IssueDocumento204 páginasIjest NG Vol2 No2 Complete IssueUkemebookieAinda não há avaliações
- Activity 3 Hardy Magsino BHTTEQDocumento21 páginasActivity 3 Hardy Magsino BHTTEQrc cortezAinda não há avaliações
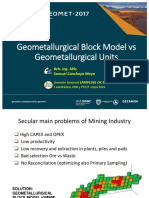
- S7 17 30 UGMs Vs MGMB Procenin Geomet 2017 ChileDocumento22 páginasS7 17 30 UGMs Vs MGMB Procenin Geomet 2017 Chileosden515100% (1)
- Blasting Blasting Tech Tips - 0 PDFDocumento18 páginasBlasting Blasting Tech Tips - 0 PDFmuthuAinda não há avaliações
- Physics 8 123Documento4 páginasPhysics 8 123Lionel GenetelliAinda não há avaliações
- (Dislocations in Solids 1) F.R.N. Nabarro - Dislocations in Solids - Elastic Theory (1979, North-Holland Publishing Co)Documento179 páginas(Dislocations in Solids 1) F.R.N. Nabarro - Dislocations in Solids - Elastic Theory (1979, North-Holland Publishing Co)Hariom PrakashAinda não há avaliações
- AllCeram Instructions enDocumento36 páginasAllCeram Instructions enFabio WenoAinda não há avaliações
- VTU Exam ScheduleDocumento46 páginasVTU Exam ScheduleKrisAinda não há avaliações
- Envision - 8.3 Multiply Fractions and Whole NumbersDocumento3 páginasEnvision - 8.3 Multiply Fractions and Whole NumbersMohamed A MoneimAinda não há avaliações
- Separation Techniques and Factors in Chemical ProcessesDocumento20 páginasSeparation Techniques and Factors in Chemical ProcessesmynurulAinda não há avaliações
- Introduction To PlasmonicsDocumento256 páginasIntroduction To Plasmonicsms853732Ainda não há avaliações
- Unit - IVDocumento33 páginasUnit - IVapi-3528226820% (1)
- L5 MU EE1ME - Differentiation - STDDocumento25 páginasL5 MU EE1ME - Differentiation - STDDinAinda não há avaliações
- Compendium Book For IIT - MainsDocumento28 páginasCompendium Book For IIT - MainsApex InstituteAinda não há avaliações
- TunnelDocumento87 páginasTunnelRejith SomanAinda não há avaliações