Você também pode gostar
- A Case Study of Concurrent Engineering Application On The Development of Parts For The White Goods Industry in BrazilDocumento27 páginasA Case Study of Concurrent Engineering Application On The Development of Parts For The White Goods Industry in Brazilsandip ThoratAinda não há avaliações
- Mill Is 1999Documento8 páginasMill Is 1999sandip ThoratAinda não há avaliações
- 10 1016@j Jnucmat 2017 01 033Documento4 páginas10 1016@j Jnucmat 2017 01 033sandip ThoratAinda não há avaliações
- Process Compressors en 2013Documento12 páginasProcess Compressors en 2013sandip ThoratAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- This PDF Is The Sample PDF Taken From Our Comprehensive Study Material For IIT-JEE Main & AdvancedDocumento17 páginasThis PDF Is The Sample PDF Taken From Our Comprehensive Study Material For IIT-JEE Main & AdvancedUjjawal singhalAinda não há avaliações
- 0625 s14 QP 22 PDFDocumento16 páginas0625 s14 QP 22 PDFHaider AliAinda não há avaliações
- StewartCalcET8 15 05Documento12 páginasStewartCalcET8 15 05OhoodKAlesayiAinda não há avaliações
- GEO REPORT StampedDocumento44 páginasGEO REPORT Stampedhameed6101986Ainda não há avaliações
- Symmetry Transfer Coefficient: Factor and Confusion KineticsDocumento5 páginasSymmetry Transfer Coefficient: Factor and Confusion KineticsAitor PastorAinda não há avaliações
- JEE Advanced 2021 Important Chapters - MathonGoDocumento6 páginasJEE Advanced 2021 Important Chapters - MathonGoÃrjït ShûklãAinda não há avaliações
- Dy DX: NPTEL Course Developer For Fluid Mechanics Dr. Niranjan Sahoo Module 04 Lecture 33 IIT-GuwahatiDocumento7 páginasDy DX: NPTEL Course Developer For Fluid Mechanics Dr. Niranjan Sahoo Module 04 Lecture 33 IIT-GuwahatilawanAinda não há avaliações
- (4104) DPP 32 50 B PDFDocumento109 páginas(4104) DPP 32 50 B PDFRAJDEEP DASAinda não há avaliações
- AQA A-Level Applied Physics Chapter 1 Rotational DynamicsDocumento21 páginasAQA A-Level Applied Physics Chapter 1 Rotational DynamicsJ3TL10% (1)
- Monitoring Devices Mg21dfDocumento5 páginasMonitoring Devices Mg21dfalone160162lAinda não há avaliações
- Fluent 6.3: Population Balance Module ManualDocumento55 páginasFluent 6.3: Population Balance Module ManualHarshit KapadiaAinda não há avaliações
- Multiple Choice Questions (Relativity)Documento4 páginasMultiple Choice Questions (Relativity)Ghulam Farid100% (1)
- Physics Part-2 Complete Book Notes Theory PDFDocumento72 páginasPhysics Part-2 Complete Book Notes Theory PDFIzaz UmerkhelAinda não há avaliações
- Psychrometrics: United States Standard AtmosphereDocumento17 páginasPsychrometrics: United States Standard AtmosphereYuti PasaribuAinda não há avaliações
- EXP - 8 - Determination of Venturimeter ConstantDocumento6 páginasEXP - 8 - Determination of Venturimeter Constantpratyush mishraAinda não há avaliações
- ME302 - Theory of Machines Ii Spring 2020-2021 Homework #2Documento2 páginasME302 - Theory of Machines Ii Spring 2020-2021 Homework #2Ege GökayAinda não há avaliações
- Heat ExxxxxDocumento15 páginasHeat ExxxxxZak_DaudAinda não há avaliações
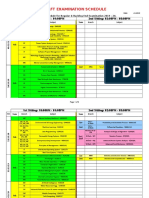
- Draft Examination Schedule: 1st Sitting: 10:00AM - 01:00PM 2nd Sitting: 02:00PM - 05:00PMDocumento8 páginasDraft Examination Schedule: 1st Sitting: 10:00AM - 01:00PM 2nd Sitting: 02:00PM - 05:00PMBiswajit mallickAinda não há avaliações
- Portfolio PhysicsLecDocumento44 páginasPortfolio PhysicsLecJohn Eazer FranciscoAinda não há avaliações
- Electronic and CircuitsDocumento772 páginasElectronic and CircuitsIbrahim A Said67% (3)
- Class 12 Physics Chapter 10 Wave OpticsDocumento24 páginasClass 12 Physics Chapter 10 Wave OpticsParvatham VijayAinda não há avaliações
- DownloadLecture 10 - Entropy, Clausius InequalityDocumento4 páginasDownloadLecture 10 - Entropy, Clausius Inequalityeuglena6Ainda não há avaliações
- 1 Outtrigger PDFDocumento7 páginas1 Outtrigger PDFSurumi Rasia SalimAinda não há avaliações
- Design of SpringsDocumento30 páginasDesign of SpringsKunal Ahiwale100% (1)
- DPP 3 SolutionDocumento1 páginaDPP 3 SolutionOmprakash DhakaAinda não há avaliações
- Forensic PhotographyDocumento20 páginasForensic PhotographyPrincess Trina Galapon RamosAinda não há avaliações
- F5 KSSM Tutorial 1.1 (Force and Motion Ii)Documento13 páginasF5 KSSM Tutorial 1.1 (Force and Motion Ii)Alia Qistina Mara KasmedeeAinda não há avaliações
- Rate of ReactionDocumento22 páginasRate of ReactionlettyAinda não há avaliações
- NasaDocumento108 páginasNasaVelibor MinićAinda não há avaliações
- Advanced 3D Modelling For Anode Baking FurnaceDocumento6 páginasAdvanced 3D Modelling For Anode Baking Furnacefariza_yunitaAinda não há avaliações