Você também pode gostar
- Clase 1 NDocumento38 páginasClase 1 Nwilliam.123Ainda não há avaliações
- Laboratorio 8 - Contador DigitalDocumento4 páginasLaboratorio 8 - Contador DigitalAugusto Torres QuirozAinda não há avaliações
- Tipos de Vatimetros y Esquemas de ConexionDocumento1 páginaTipos de Vatimetros y Esquemas de ConexionMelqui Caicedo HernandezAinda não há avaliações
- Cap - 8 Ensayos Maquinas CCDocumento61 páginasCap - 8 Ensayos Maquinas CCrosivigAinda não há avaliações
- Preinforme Automatizacion 3 JehanDocumento4 páginasPreinforme Automatizacion 3 JehanRichard Alexander Ruano LeytonAinda não há avaliações
- 1er Informe Final (Rectificadores Monofásicos y Trifásicos)Documento18 páginas1er Informe Final (Rectificadores Monofásicos y Trifásicos)Adriel ArredondoAinda não há avaliações
- Polarización Del Transistor BJTDocumento6 páginasPolarización Del Transistor BJTEdison OrtegaAinda não há avaliações
- Ejer PropuestosDocumento6 páginasEjer PropuestosRicardo BarrionuevoAinda não há avaliações
- Sist Digitales Lab 3 (Unac)Documento6 páginasSist Digitales Lab 3 (Unac)nothingtosee99Ainda não há avaliações
- TroceadorDocumento198 páginasTroceadorJacqueline LunaAinda não há avaliações
- Transistor IgbtDocumento5 páginasTransistor IgbtTorrez JeanAinda não há avaliações
- Configuracion CascadaDocumento7 páginasConfiguracion CascadaKely Estefani Alcántara PinedoAinda não há avaliações
- Funcionaniento de Un Alternador Sincronico Bajo CargaDocumento14 páginasFuncionaniento de Un Alternador Sincronico Bajo CargaMaría Teresa Hernández GamarraAinda não há avaliações
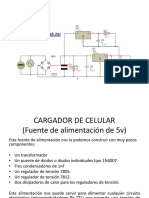
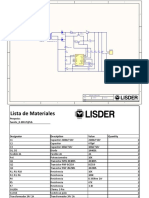
- Cargador de CelularDocumento10 páginasCargador de CelularDiego PérezAinda não há avaliações
- INFORME 2 DigitalesDocumento7 páginasINFORME 2 Digitalesbrayhan1Ainda não há avaliações
- Lista Ejerciciois Bandas EnergiaDocumento1 páginaLista Ejerciciois Bandas EnergiaJuan Fabian MoralesAinda não há avaliações
- Informe Final 4 CIRCUTOS DIGITALES 2 (FIEE-UNMSM)Documento10 páginasInforme Final 4 CIRCUTOS DIGITALES 2 (FIEE-UNMSM)Leonardo Ponce Garcia0% (1)
- Diodos Rectificadores de Baja FrecuenciaDocumento1 páginaDiodos Rectificadores de Baja FrecuenciaAlfredo FarrugiaAinda não há avaliações
- Practica 4. Circuitos Msi Parte 2 Informe Laboratorio Circuitos DigitalesDocumento26 páginasPractica 4. Circuitos Msi Parte 2 Informe Laboratorio Circuitos DigitalesDanielaAinda não há avaliações
- Curva Del Diodo Informe 1Documento7 páginasCurva Del Diodo Informe 1Ariel ACAinda não há avaliações
- Fuente Bipolar RegulableDocumento2 páginasFuente Bipolar RegulableGuti A. GutierrezAinda não há avaliações
- Informe N5 LABORATORIO CONTROLES ELÉCTRICOSDocumento11 páginasInforme N5 LABORATORIO CONTROLES ELÉCTRICOSJose Miguel Castro Moscoso (nG. PhilPs TF2)Ainda não há avaliações
- Práctica 8 para Enviar - 2019 1Documento10 páginasPráctica 8 para Enviar - 2019 1jefersonAinda não há avaliações
- DL1019M Freno ElectromagnéticoDocumento17 páginasDL1019M Freno ElectromagnéticoJonnathan Brenes VíquezAinda não há avaliações
- Procesos ErgódicosDocumento3 páginasProcesos ErgódicosEmily Tobar100% (2)
- Familia Logica TTL-ResumenDocumento4 páginasFamilia Logica TTL-Resumenpepeluis666Ainda não há avaliações
- Electronica de PotenciaDocumento3 páginasElectronica de PotenciaLuis Ernesto Mercado ChagoyaAinda não há avaliações
- Informe de Lab. de Control de Procesos 1Documento10 páginasInforme de Lab. de Control de Procesos 1Angel Alex Barrantes QuelloAinda não há avaliações
- Jiménez 2017079514Documento3 páginasJiménez 2017079514Javier Jimnez FonsecaAinda não há avaliações
- Diac TriacDocumento6 páginasDiac TriacJorge Ivan Ken EspinozaAinda não há avaliações
- Laboratorio 1.3Documento10 páginasLaboratorio 1.3Nicolas Jimenez OrduzAinda não há avaliações
- Puertas Lógicas Teoría y AscensorDocumento24 páginasPuertas Lógicas Teoría y AscensorEnrique Esteban Paillavil100% (1)
- CuestionarioDocumento10 páginasCuestionario25 Olmedo RenatoAinda não há avaliações
- Deber 3Documento2 páginasDeber 3raul MalquinAinda não há avaliações
- Preparatorio 9 Sistemas DigitalesDocumento11 páginasPreparatorio 9 Sistemas DigitalesJuanCarlos JCAinda não há avaliações
- Informe DIODO RECTIFICADORDocumento12 páginasInforme DIODO RECTIFICADORIsa AsadobayAinda não há avaliações
- Aplicaciones de Circuitos de Primer Orden y SegundoDocumento19 páginasAplicaciones de Circuitos de Primer Orden y SegundoMarco Vinicio Chuma Alvarez100% (2)
- Informe Laboratorio Numero 1 Maq ElecDocumento8 páginasInforme Laboratorio Numero 1 Maq ElecJuan C. MendozaAinda não há avaliações
- Guia de Practica 09 - Controladores AC - UpdateDocumento8 páginasGuia de Practica 09 - Controladores AC - UpdateWilliam López BayasAinda não há avaliações
- Paper MicrocontroladoresssDocumento8 páginasPaper MicrocontroladoresssAlexander GsAinda não há avaliações
- Lab 5 y 6 CorregidoDocumento4 páginasLab 5 y 6 CorregidoVictoria BermudezAinda não há avaliações
- Practica 3 LaboratorioDocumento4 páginasPractica 3 Laboratorioroger betancourth100% (1)
- Triac Informe N°3Documento9 páginasTriac Informe N°3Alberto HinojosaAinda não há avaliações
- Practica de Automatismos Electricos AdrianzenchDocumento1 páginaPractica de Automatismos Electricos AdrianzenchAdoajsojod LanosAinda não há avaliações
- Practica Calificada - 2Documento2 páginasPractica Calificada - 2William Robert Torres Navarrete0% (1)
- Práctica 1 - Medición Indirecta de ResistenciasDocumento3 páginasPráctica 1 - Medición Indirecta de ResistenciasArenAinda não há avaliações
- El Amplificador Darlington Con BJTDocumento2 páginasEl Amplificador Darlington Con BJTLeirsson PeñalvaAinda não há avaliações
- Practica 3 RectificadoresDocumento7 páginasPractica 3 RectificadoresRicky BreakAinda não há avaliações
- Investigacion FotodiodoDocumento5 páginasInvestigacion Fotodiodosaul bernalAinda não há avaliações
- Circuitos Neumaticos Con PLCDocumento19 páginasCircuitos Neumaticos Con PLC_Ser-Gio_Ainda não há avaliações
- Ejercicio 6. Mando para El Arranque Con Resistencias EstatoricasDocumento8 páginasEjercicio 6. Mando para El Arranque Con Resistencias EstatoricasMARIO0% (1)
- Preparatorio8 ElectronicaPotenciaDocumento10 páginasPreparatorio8 ElectronicaPotenciaPablo CastilloAinda não há avaliações
- Lab 1 ConvertidoresDocumento11 páginasLab 1 ConvertidoresKriss OvandoAinda não há avaliações
- Informe 2 FundamentosDocumento5 páginasInforme 2 FundamentosDavid W-kc Almora Mamani - Ōf̲̲̅̅ı̲̲̅c̲̲̅̅ı̲̲̅̅a̲̲̅̅l̲̲̅̅'̲̲̅̅f̲̲̅̅bAinda não há avaliações
- Contadores y RegistrosDocumento35 páginasContadores y RegistrosDanitza Llanos TorresAinda não há avaliações
- 4.1 Flip-Flops TrejoDocumento18 páginas4.1 Flip-Flops TrejoAndres RodriguezAinda não há avaliações
- Circuitos Logicos SecuencialesDocumento17 páginasCircuitos Logicos SecuencialesalfredotoxquiAinda não há avaliações
- Informe Logicas SecuencialDocumento17 páginasInforme Logicas SecuencialYhared CaprilesAinda não há avaliações
- Diseo Digital 3Documento13 páginasDiseo Digital 3reyna isabel cob gomezAinda não há avaliações
- Trabajo Investigación Tema 4 (N°c.18500311)Documento32 páginasTrabajo Investigación Tema 4 (N°c.18500311)Jason ClementeAinda não há avaliações
- Sistemas Digitales Tema 2Documento7 páginasSistemas Digitales Tema 2Dione Huaman BordaAinda não há avaliações
- Tema 6 - IE. Maquinas ElectricasDocumento21 páginasTema 6 - IE. Maquinas ElectricasJordy Bryan Saccsa RodriguezAinda não há avaliações
- Sistemas Digitales Tema 7Documento33 páginasSistemas Digitales Tema 7Dione Huaman BordaAinda não há avaliações
- Sistemas Digitales Tema 6Documento18 páginasSistemas Digitales Tema 6Dione Huaman BordaAinda não há avaliações
- Sistemas Digitalñes Tema 2Documento14 páginasSistemas Digitalñes Tema 2Dione Huaman Borda0% (1)
- Electrotecnia Motores de Induccion - Practica Nro 6Documento16 páginasElectrotecnia Motores de Induccion - Practica Nro 6Virgilio GonzálezAinda não há avaliações
- Nikola TeslaDocumento2 páginasNikola TeslaDione Huaman BordaAinda não há avaliações
- Sistemas DigitalesDocumento35 páginasSistemas DigitalesDione Huaman Borda100% (1)
- Informedelproyectotacometro 121019175122 Phpapp01 PDFDocumento21 páginasInformedelproyectotacometro 121019175122 Phpapp01 PDFAnonymous rHxYVxtBAinda não há avaliações
- Motor EsDocumento68 páginasMotor EsjuandavidAinda não há avaliações
- GuiaElectronicaPractica PDFDocumento57 páginasGuiaElectronicaPractica PDFAdricarq RecordAinda não há avaliações
- Sistema Digitales Tema 6Documento85 páginasSistema Digitales Tema 6Dione Huaman Borda67% (3)
- Informedelproyectotacometro 121019175122 Phpapp01 PDFDocumento21 páginasInformedelproyectotacometro 121019175122 Phpapp01 PDFAnonymous rHxYVxtBAinda não há avaliações
- Guia de Estudio - Electricidad Ind 25Documento218 páginasGuia de Estudio - Electricidad Ind 25mars1972Ainda não há avaliações
- Elecronica Digital Parte 2Documento23 páginasElecronica Digital Parte 2Dione Huaman BordaAinda não há avaliações
- Elecronica Digital Parte 2Documento23 páginasElecronica Digital Parte 2Dione Huaman BordaAinda não há avaliações
- MuxDocumento9 páginasMuxjoseyumizacaAinda não há avaliações
- Nivel AvanzadoDocumento123 páginasNivel AvanzadoDione Huaman BordaAinda não há avaliações
- Proyectos de ElectronicaDocumento110 páginasProyectos de ElectronicaErick_Alexander100% (1)
- Circuitos Basicos de ElectronicaDocumento62 páginasCircuitos Basicos de ElectronicaORLANDOGAP100% (2)
- Dig16 Divisor de FrecuenciasDocumento9 páginasDig16 Divisor de FrecuenciasDione Huaman BordaAinda não há avaliações
- GuiaElectronicaPractica PDFDocumento57 páginasGuiaElectronicaPractica PDFAdricarq RecordAinda não há avaliações
- El Mundo de La ElectrónicaDocumento117 páginasEl Mundo de La Electrónicafaio_el_unico100% (12)
- Guia de Estudio - Electricidad Ind 25Documento218 páginasGuia de Estudio - Electricidad Ind 25mars1972Ainda não há avaliações
- Caja RegistradoraDocumento18 páginasCaja RegistradoraDione Huaman BordaAinda não há avaliações
- Manual Manipuladores de AlimentosDocumento52 páginasManual Manipuladores de AlimentosWilly Calsina MiramiraAinda não há avaliações
- MBP Desarrollo HabilidadesDocumento104 páginasMBP Desarrollo HabilidadesDione Huaman BordaAinda não há avaliações
- Manual Comedores ComunitariosDocumento40 páginasManual Comedores ComunitariosFreefiler100% (13)
- Tabla de Códigos BeepDocumento2 páginasTabla de Códigos BeepJose Luis Garcia100% (1)
- Alu 74LS181Documento3 páginasAlu 74LS181jonat09Ainda não há avaliações
- Arquitectura Computadoras ISCDocumento256 páginasArquitectura Computadoras ISCSergio BrownAinda não há avaliações
- ACS712 DatasheetDocumento2 páginasACS712 DatasheetLewis LiddellAinda não há avaliações
- Cronómetro DigitalDocumento7 páginasCronómetro DigitalJhoselyn Pamela GuachaminAinda não há avaliações
- Especificaciones PCB MulticapaDocumento4 páginasEspecificaciones PCB MulticapaMartín VillaAinda não há avaliações
- Fundamentos de Lógica Digital - 6A - Problemas ResueltosDocumento67 páginasFundamentos de Lógica Digital - 6A - Problemas ResueltosyohanAinda não há avaliações
- Temporizador WikiDocumento2 páginasTemporizador WikiCaro CalaAinda não há avaliações
- Motherboard TDocumento9 páginasMotherboard TramatAinda não há avaliações
- Diagramas de TiempoDocumento11 páginasDiagramas de Tiempomijailhua100% (1)
- UD08 ElectronicaDocumento20 páginasUD08 ElectronicaTomás Barrientos SaihuaAinda não há avaliações
- Flip-Flops SincrónicosDocumento6 páginasFlip-Flops SincrónicosjuanAinda não há avaliações
- Parametros Mas Importantes de ProcesadorDocumento7 páginasParametros Mas Importantes de ProcesadorMax LopezAinda não há avaliações
- TTL y IILDocumento7 páginasTTL y IILAlan Pulido MusleraAinda não há avaliações
- Ejercicios de Codificadores y DecodificadoresDocumento4 páginasEjercicios de Codificadores y DecodificadoresYhojan Kennedy Flores ChipanaAinda não há avaliações
- Banco de Preguntas 3er. P. Sistemas Digitales IDocumento5 páginasBanco de Preguntas 3er. P. Sistemas Digitales ICarlos ChoqueAinda não há avaliações
- Catálogo STEREN ResumidoDocumento16 páginasCatálogo STEREN ResumidoCesar GutierrezAinda não há avaliações
- Circuitos Integrados ASICSDocumento3 páginasCircuitos Integrados ASICSJEFFERSON STALYN NUÑEZ QUISHPEAinda não há avaliações
- Informe Registro de DesplazamientoDocumento7 páginasInforme Registro de DesplazamientoCarlos LopezAinda não há avaliações
- Comparadores 1Documento3 páginasComparadores 1claudiaAinda não há avaliações
- MicsDocumento1 páginaMicsAnonymous crt1quPgAinda não há avaliações
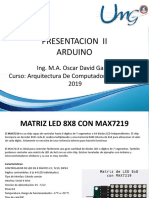
- Presentacion II Ejercicio Arduino - Reducido - FlechaDocumento29 páginasPresentacion II Ejercicio Arduino - Reducido - FlechaCarlos YmeriAinda não há avaliações
- Practica 3 Sistemas DigitalesDocumento11 páginasPractica 3 Sistemas DigitalesAngel BernabeAinda não há avaliações
- Ejercicios Arquitectura de ComputadoresDocumento18 páginasEjercicios Arquitectura de ComputadoresJuanFran1995Ainda não há avaliações
- A-E-2 037 David Jimenez MarcoDocumento10 páginasA-E-2 037 David Jimenez Marcodavinci300Ainda não há avaliações
- Tarea #08 - Realiza Prueba de Compuertas Lógicas DigitalesDocumento12 páginasTarea #08 - Realiza Prueba de Compuertas Lógicas DigitalesJunior BellidoAinda não há avaliações
- T4.2. S. Memoria - CacheDocumento17 páginasT4.2. S. Memoria - CacheAdam Johnson100% (1)
- Laboratorio Compuertas LogicasDocumento4 páginasLaboratorio Compuertas LogicasJunior QuirogaAinda não há avaliações
- Clase 6 PDFDocumento52 páginasClase 6 PDFHerlis Garcia PerezAinda não há avaliações
- Unidad 2Documento69 páginasUnidad 2DANIEL GONZALEZ ZAVALAAinda não há avaliações