Você também pode gostar
- Movimiento Rotacional 3 PDF FreeDocumento59 páginasMovimiento Rotacional 3 PDF FreeDaniel Enrique Vallejo Veintimilla100% (1)
- Formación de Auxiliar de Odontología en menos de 40 horasDocumento18 páginasFormación de Auxiliar de Odontología en menos de 40 horasJose PaulAinda não há avaliações
- Ecuaciones de Movimiento de Un Cuerpo RigidoDocumento53 páginasEcuaciones de Movimiento de Un Cuerpo RigidoLennin Olazo100% (1)
- Cinetica de Los Cuerpos RiguidosDocumento28 páginasCinetica de Los Cuerpos RiguidosEduardoAinda não há avaliações
- Zegel IpaeDocumento81 páginasZegel IpaeTony Sanchez ChambaAinda não há avaliações
- La OvogenesisDocumento10 páginasLa OvogenesisLuis Francisco Manuel Carranza CruzAinda não há avaliações
- ENSILAJE: CONSERVACIÓN DE FORRAJES EN SILOSDocumento7 páginasENSILAJE: CONSERVACIÓN DE FORRAJES EN SILOSYuliet Castaño50% (2)
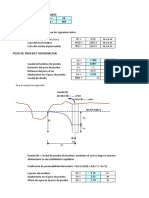
- Prueba de Estanqueidad - ABNT NBR 9650Documento22 páginasPrueba de Estanqueidad - ABNT NBR 9650percevezAinda não há avaliações
- Evaluación final de probabilidad y estadísticaDocumento8 páginasEvaluación final de probabilidad y estadísticaedgar ramosAinda não há avaliações
- Equilibrio Cuerpo RigidoDocumento15 páginasEquilibrio Cuerpo RigidowilfredoAinda não há avaliações
- Dinamica de RotacionDocumento8 páginasDinamica de RotacionPedro Martín Fuentes MangoAinda não há avaliações
- Determinación experimental del momento de inercia de una rueda de MaxwellDocumento9 páginasDeterminación experimental del momento de inercia de una rueda de MaxwellvictorAinda não há avaliações
- Relación dinámica lineal rotacionalDocumento5 páginasRelación dinámica lineal rotacionalcarlangaschelysAinda não há avaliações
- Rodadura 2Documento11 páginasRodadura 2Maria Camila Zambrano LoaizaAinda não há avaliações
- Dinamica Unidad 2Documento13 páginasDinamica Unidad 2Ricardo SotoAinda não há avaliações
- Dinámica rotacional: torque y aceleración angularDocumento7 páginasDinámica rotacional: torque y aceleración angularcarlangaschelysAinda não há avaliações
- Informe de Laboratorio 4Documento6 páginasInforme de Laboratorio 4Gianmarco CAAinda não há avaliações
- Trabajo de Fisica 2Documento10 páginasTrabajo de Fisica 2Ronny AlbornozAinda não há avaliações
- Proyecto Extra 7Documento24 páginasProyecto Extra 7Velangel3103Ainda não há avaliações
- Dinamica de Rotación FMDocumento32 páginasDinamica de Rotación FMAmIn20122Ainda não há avaliações
- Guia Rotacion 2Documento18 páginasGuia Rotacion 2Vinicio RanAinda não há avaliações
- Capitulo 8Documento50 páginasCapitulo 8Jhordi NuñezAinda não há avaliações
- Dinamica de RotacionDocumento10 páginasDinamica de Rotacionalex lemaAinda não há avaliações
- Fisica 1 Rueda MaxwellDocumento35 páginasFisica 1 Rueda MaxwellCarlos CelisAinda não há avaliações
- Dinámica Rotacional - InformeDocumento25 páginasDinámica Rotacional - InformeRaùl Espinoza ZuñigaAinda não há avaliações
- Cing15a.dinamicarot - Doc DINÁMICA ROTACIONALDocumento19 páginasCing15a.dinamicarot - Doc DINÁMICA ROTACIONALYeliber Aguirre ManzabaAinda não há avaliações
- Momento Angular de Una PartículaDocumento40 páginasMomento Angular de Una PartículaSilviaAinda não há avaliações
- Dinamica RotacionalDocumento10 páginasDinamica RotacionalWilliam HinojosaAinda não há avaliações
- Fisica de Fluidos Momentos de InerciaDocumento6 páginasFisica de Fluidos Momentos de InerciaBrayan MoralesAinda não há avaliações
- Fisica 2 - Rotacion de Cuerpos RigidosDocumento11 páginasFisica 2 - Rotacion de Cuerpos RigidosRamon100% (1)
- Cinemática Del Cuerpo RígidoDocumento14 páginasCinemática Del Cuerpo RígidoLuis Miguel Chávez HuacchaAinda não há avaliações
- Dinámica de rotación de un cuerpo rígidoDocumento37 páginasDinámica de rotación de un cuerpo rígidoJessica TafurAinda não há avaliações
- Conservacion de Momento AngularDocumento8 páginasConservacion de Momento Angularandres davilaAinda não há avaliações
- Diapositivas DinámicaDocumento75 páginasDiapositivas DinámicaEnriquez IvanAinda não há avaliações
- Dinamica Rotacional Genesis MosqueraDocumento23 páginasDinamica Rotacional Genesis MosqueraGenesisAinda não há avaliações
- 5 Dinámica RotacionalDocumento40 páginas5 Dinámica RotacionalIsrael CGAinda não há avaliações
- Lectura Movimiento RotacionalDocumento23 páginasLectura Movimiento Rotacionalandres felipeAinda não há avaliações
- Fisica 2 AlaDocumento15 páginasFisica 2 AlaEsperanza PulidoAinda não há avaliações
- Rotacion de Cuerpos RigidosDocumento5 páginasRotacion de Cuerpos RigidosCristian VargasAinda não há avaliações
- Dinámica RotacionalDocumento32 páginasDinámica RotacionalRandy Hernandez100% (1)
- Cinemática plana del cuerpo rígidoDocumento10 páginasCinemática plana del cuerpo rígidoDavid RamirezAinda não há avaliações
- Tarea Investigacion Mecanica 3Documento12 páginasTarea Investigacion Mecanica 3Nefhtali ZuñigaAinda não há avaliações
- Dinamica de Rotacion (Laboratorio 5)Documento25 páginasDinamica de Rotacion (Laboratorio 5)Jeef Chuquispuma MartínezAinda não há avaliações
- CLASE4Documento24 páginasCLASE4yaremi MejiaAinda não há avaliações
- Momento Angular de Un Sólido RígidoDocumento10 páginasMomento Angular de Un Sólido Rígido17alexisAinda não há avaliações
- Dinámica de RotaciónDocumento20 páginasDinámica de RotaciónElías VelascoAinda não há avaliações
- Momento de inercia, movimiento circular y energía cinética rotacionalDocumento16 páginasMomento de inercia, movimiento circular y energía cinética rotacionalAnonymous nOqqYoDvzAinda não há avaliações
- Trabajo de ExposicionesDocumento50 páginasTrabajo de ExposicionesDream BigAinda não há avaliações
- Informe N°5Documento36 páginasInforme N°5eric lop vegAinda não há avaliações
- Cinemática y Dinámica Del Cuerpo RígidoDocumento11 páginasCinemática y Dinámica Del Cuerpo RígidoNaza CapuzziAinda não há avaliações
- Momento polar de inercia: definición, fórmulas y aplicacionesDocumento10 páginasMomento polar de inercia: definición, fórmulas y aplicacionesZurita Alejandro MauricioAinda não há avaliações
- Investigacion EstructuraDocumento5 páginasInvestigacion EstructuraFelixAinda não há avaliações
- Laboratorio Momento de InerciaDocumento10 páginasLaboratorio Momento de InerciaDonaldo BerrioAinda não há avaliações
- Momento AngularDocumento11 páginasMomento AngularArturo Padilla100% (1)
- Dinamica RotacionalDocumento11 páginasDinamica RotacionalniniberthcolmenarezAinda não há avaliações
- Universidad Peninsula de Santa Elena Facultad de Ciencias de La Ingenieria Ingenieria Civil CURSO: 1/2Documento44 páginasUniversidad Peninsula de Santa Elena Facultad de Ciencias de La Ingenieria Ingenieria Civil CURSO: 1/2AdrianaAinda não há avaliações
- Unidad 5 de DinamicaDocumento11 páginasUnidad 5 de DinamicaUlisesMoralesAinda não há avaliações
- Momento Angular de Un Sólido RígidoDocumento6 páginasMomento Angular de Un Sólido RígidoAlejandra NacifAinda não há avaliações
- Fundamento Teórico y ObjetivosDocumento4 páginasFundamento Teórico y ObjetivosYFluegkAinda não há avaliações
- Fisica Rotación de Cuerpos RigidosDocumento8 páginasFisica Rotación de Cuerpos RigidosKaine GV100% (2)
- Trabajo FisicaDocumento30 páginasTrabajo FisicaCarlos ChAinda não há avaliações
- Movimiento RotacionalDocumento59 páginasMovimiento RotacionalGustavoBurgos67% (3)
- Tarea de Investigación No 3Documento12 páginasTarea de Investigación No 3alexis.rayo2003Ainda não há avaliações
- Cantidad de Movimiento - ChoquesDocumento7 páginasCantidad de Movimiento - ChoquesMiguelAinda não há avaliações
- Obras de CaptacionDocumento20 páginasObras de CaptacionNelson Moller100% (1)
- Recetario SaludableDocumento12 páginasRecetario Saludablejhosep santiago saavedraAinda não há avaliações
- Asistencia en Fisioterapia y Rehabilitación Clase 4Documento16 páginasAsistencia en Fisioterapia y Rehabilitación Clase 4Lindsay MaytaAinda não há avaliações
- Guia Produccion de Imagenes DigitalesDocumento7 páginasGuia Produccion de Imagenes DigitalesYeffer tattooAinda não há avaliações
- Plan de Inicio de Gestion Kenneth Lee PDFDocumento58 páginasPlan de Inicio de Gestion Kenneth Lee PDFYumy VelásquezAinda não há avaliações
- La Enseñanza de La LechuzaDocumento2 páginasLa Enseñanza de La LechuzaCarolina GámezAinda não há avaliações
- AST - Formato Armado de AndamioDocumento3 páginasAST - Formato Armado de AndamioAnDrez AguirreAinda não há avaliações
- La Colocación de Postes Prefabricados o Hechos A Medida de Fibra Afecta La Supervivencia de 3 Años de Premolares Tratados EndodónticamenteDocumento7 páginasLa Colocación de Postes Prefabricados o Hechos A Medida de Fibra Afecta La Supervivencia de 3 Años de Premolares Tratados EndodónticamenteDan MPAinda não há avaliações
- Calderas IndustrialesDocumento15 páginasCalderas IndustrialesFreddy EspejoAinda não há avaliações
- Estados hipertensivos del embarazo: Preeclampsia, Hipertensión gestacional y EclampsiaDocumento5 páginasEstados hipertensivos del embarazo: Preeclampsia, Hipertensión gestacional y EclampsiaAnaAinda não há avaliações
- El CarburadorDocumento0 páginaEl CarburadorJUANCHURAAinda não há avaliações
- 8 Formas de Utilizar El Agua BenditaDocumento3 páginas8 Formas de Utilizar El Agua BenditaLAURAAinda não há avaliações
- Fractura de Cadera01Documento16 páginasFractura de Cadera01claudia casalAinda não há avaliações
- Blanes VialeDocumento1 páginaBlanes VialeFacundo Matías Almeida BernardoAinda não há avaliações
- Taller de Verificación Balanceo RedoxDocumento7 páginasTaller de Verificación Balanceo RedoxJUAN JOSE PALACIOS MAHECHAAinda não há avaliações
- Cartilla - Neurociencia - DEF CUIDADO CARIÑOSO Y SENSIBLEDocumento6 páginasCartilla - Neurociencia - DEF CUIDADO CARIÑOSO Y SENSIBLEDouglas Alexander Lopez PinedaAinda não há avaliações
- Vacunas Inactivas RecombinanteDocumento6 páginasVacunas Inactivas RecombinantebypikaAinda não há avaliações
- Estereoscopia en Autodesk Maya 3Documento16 páginasEstereoscopia en Autodesk Maya 3Valentina RoaAinda não há avaliações
- NTC 2329: Guía de soldadura, corte y representación simbólicaDocumento7 páginasNTC 2329: Guía de soldadura, corte y representación simbólicacoordinador ProyectoAinda não há avaliações
- Guia de Aprendizaje Detención de ErroresDocumento19 páginasGuia de Aprendizaje Detención de ErroresYulipovdaAinda não há avaliações
- Placas base y rodetas de oclusión y contornoDocumento36 páginasPlacas base y rodetas de oclusión y contornoH Adela CBAinda não há avaliações
- Norma Mexicana Prevención Incendios Centros TrabajoDocumento52 páginasNorma Mexicana Prevención Incendios Centros TrabajoEDUARDOAinda não há avaliações
- Matriz Energética de GuatemalaDocumento19 páginasMatriz Energética de GuatemalaJosué RodríguezAinda não há avaliações