Você também pode gostar
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Ainda não há avaliações
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesNo EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesNota: 1.5 de 5 estrelas1.5/5 (2)
- Solutions 4 For Oscillations and WavesDocumento5 páginasSolutions 4 For Oscillations and WavesUmarAinda não há avaliações
- Minor2 SolDocumento4 páginasMinor2 SolShane WatsonAinda não há avaliações
- Adobe Scan 02 Apr 2023Documento7 páginasAdobe Scan 02 Apr 2023TEJAS.S.ARADHYA NAMAGONDLUAinda não há avaliações
- Rings and DiscsDocumento14 páginasRings and DiscsEbeda BenardAinda não há avaliações
- Strauss PDEch 2 S 1 P 8Documento3 páginasStrauss PDEch 2 S 1 P 8Pronoy MandalAinda não há avaliações
- Central Forces Tutorial ExercisesDocumento7 páginasCentral Forces Tutorial ExercisesShweta SridharAinda não há avaliações
- Assignment 2Documento6 páginasAssignment 2Kalpit AgarwalAinda não há avaliações
- Assignment 1, Solution: Dept. of Electrical & Electronic Engineering (EEE)Documento3 páginasAssignment 1, Solution: Dept. of Electrical & Electronic Engineering (EEE)mahmudulAinda não há avaliações
- ElasticityPolars 04 BodyForcesRotatingDiscs PDFDocumento5 páginasElasticityPolars 04 BodyForcesRotatingDiscs PDFMax HinojosaAinda não há avaliações
- Vector & Basic Maths - Practice Sheet - JEE Ultimate Crash Course 2024Documento5 páginasVector & Basic Maths - Practice Sheet - JEE Ultimate Crash Course 2024Comical comicAinda não há avaliações
- M.M Tripathi Coordinate GeometryDocumento85 páginasM.M Tripathi Coordinate GeometryDivya AgrawalAinda não há avaliações
- Lecture 23: Introduction To Valence Bond TheoryDocumento18 páginasLecture 23: Introduction To Valence Bond TheoryElectro_LiteAinda não há avaliações
- Lessons 22-45Documento179 páginasLessons 22-45Shakeel NawazAinda não há avaliações
- Error Analysis of Direct Methods of Matrix InversionDocumento50 páginasError Analysis of Direct Methods of Matrix Inversionagbas20026896Ainda não há avaliações
- Resp 8Documento1 páginaResp 8Andre DuarteAinda não há avaliações
- Sol 100318Documento11 páginasSol 100318Nitin Suyan PanchalAinda não há avaliações
- Tutorial PDFDocumento50 páginasTutorial PDFvasudevan m.vAinda não há avaliações
- 4.2.1 Equilibrium Equations in Polar CoordinatesDocumento6 páginas4.2.1 Equilibrium Equations in Polar CoordinatesShgoyal0073_Ainda não há avaliações
- Name: Muhammad Usman Rollno.619 Semester:6 Subject: Quantum Mechanics DEPT: PhysicsDocumento6 páginasName: Muhammad Usman Rollno.619 Semester:6 Subject: Quantum Mechanics DEPT: PhysicsMujtaba KhanAinda não há avaliações
- Allen: Final Jee-Main Examination - February, 2021Documento4 páginasAllen: Final Jee-Main Examination - February, 2021ik62299Ainda não há avaliações
- Avril's Radiation Problem: P Qa ( X + I Y) e Ye YeDocumento5 páginasAvril's Radiation Problem: P Qa ( X + I Y) e Ye YeBerenice MuruagaAinda não há avaliações
- Chapter 8 Series: Try These 8.1Documento17 páginasChapter 8 Series: Try These 8.1EggBread12Ainda não há avaliações
- Ee324 Hw#6 Spring12Documento11 páginasEe324 Hw#6 Spring12Jobayer AhamedAinda não há avaliações
- Mathematical Association of AmericaDocumento9 páginasMathematical Association of AmericathonguyenAinda não há avaliações
- 02 6polar Coordinates 44-48Documento4 páginas02 6polar Coordinates 44-48eamcetmaterialsAinda não há avaliações
- Homework 1Documento1 páginaHomework 1Ricardo ElizaldeAinda não há avaliações
- Math 115 Lab 4 SolutionsDocumento3 páginasMath 115 Lab 4 SolutionsDPAinda não há avaliações
- Charged Static Fluid SpheresDocumento11 páginasCharged Static Fluid Spheresmasa24Ainda não há avaliações
- Eulerzig ZagDocumento6 páginasEulerzig ZagLe Chanh Thanh TinAinda não há avaliações
- The Schrodinger Equation in Spherical CoordinatesDocumento5 páginasThe Schrodinger Equation in Spherical CoordinatesRaga Pranathi TanduruAinda não há avaliações
- 30 580ln Fa08 PDFDocumento14 páginas30 580ln Fa08 PDFPedroAinda não há avaliações
- Assignment 4Documento2 páginasAssignment 4Deepro SarkarAinda não há avaliações
- Jee Maths 11thDocumento2 páginasJee Maths 11theplus ajmerAinda não há avaliações
- Allen: Final Jee-Main Examination - August, 2021Documento3 páginasAllen: Final Jee-Main Examination - August, 2021K DHANALAKSHMI K DHANALAKSHMIAinda não há avaliações
- MATH1009 Test 2 SolutionsDocumento3 páginasMATH1009 Test 2 SolutionsfatdogeAinda não há avaliações
- MO Lecture Course-2 PDFDocumento20 páginasMO Lecture Course-2 PDFaneeshssaAinda não há avaliações
- Calculus and Linear AlgebraDocumento25 páginasCalculus and Linear AlgebraGamer YAinda não há avaliações
- HW 4 SolDocumento5 páginasHW 4 SolAlexey VoroninAinda não há avaliações
- Gerretsen InequalityDocumento6 páginasGerretsen InequalityMoti LevyAinda não há avaliações
- Assignment 3Documento3 páginasAssignment 3SarthakAinda não há avaliações
- Sol 03Documento7 páginasSol 03kirk putmanAinda não há avaliações
- Analytic Geometry in Calculus: Polar Coordinate ExercisesDocumento45 páginasAnalytic Geometry in Calculus: Polar Coordinate ExercisescharlesbrachAinda não há avaliações
- Mock Test - 1Documento3 páginasMock Test - 1kishangopi123Ainda não há avaliações
- Foot Atomic Solutions by Zhao, C.Documento32 páginasFoot Atomic Solutions by Zhao, C.Jacob Francis94% (16)
- WKB Method for Solving Dirac EquationDocumento6 páginasWKB Method for Solving Dirac EquationVdhieieAinda não há avaliações
- Trig formulas & PDE solutionsDocumento2 páginasTrig formulas & PDE solutionsVasil GorgievAinda não há avaliações
- TS 1 - 105200Documento2 páginasTS 1 - 105200KAPEMBWA MAPALOAinda não há avaliações
- Space Flight QuizDocumento2 páginasSpace Flight QuizbooksforfunAinda não há avaliações
- Solutions Fourier TransformsDocumento16 páginasSolutions Fourier TransformsEduardo WatanabeAinda não há avaliações
- Aritmetic Progression Sum of The First N Terms: T T T S - SDocumento40 páginasAritmetic Progression Sum of The First N Terms: T T T S - STANG PEI PEI100% (6)
- MA1001.uinit 4 1Documento2 páginasMA1001.uinit 4 1Rɩsʜʌv SɩŋʛʜAinda não há avaliações
- MR - Santa Has To Decode A Number ABCDEF Where Each Alphabet Is Respersented by A Single Digit - Suppose An Orbital Whose RadialDocumento1 páginaMR - Santa Has To Decode A Number ABCDEF Where Each Alphabet Is Respersented by A Single Digit - Suppose An Orbital Whose RadialSanthosh KAinda não há avaliações
- SignalsDocumento3 páginasSignalsBerentoAinda não há avaliações
- Polar Coordinate SystemsDocumento8 páginasPolar Coordinate SystemsalfiaAinda não há avaliações
- MT410 EXAM 3 SAMPLE 1 SOLUTIONSDocumento8 páginasMT410 EXAM 3 SAMPLE 1 SOLUTIONShendrik setyawanAinda não há avaliações
- Jee Advanced 2018 Top 10 Ranks Mathematics QuestionsDocumento15 páginasJee Advanced 2018 Top 10 Ranks Mathematics QuestionschandraAinda não há avaliações
- Physics 725: Assignment 1: (To Be Submitted by Tuesday, September 20, 2016)Documento3 páginasPhysics 725: Assignment 1: (To Be Submitted by Tuesday, September 20, 2016)Tuba SarwarAinda não há avaliações
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesNo EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesAinda não há avaliações
- Titanium and Its Alloys: Metallurgy, Heat Treatment and Alloy CharacteristicsDocumento13 páginasTitanium and Its Alloys: Metallurgy, Heat Treatment and Alloy CharacteristicsBruna GomesAinda não há avaliações
- M-346 Advanced Trainer's Early Test Flights Achieve MilestonesDocumento12 páginasM-346 Advanced Trainer's Early Test Flights Achieve MilestonespuhumightAinda não há avaliações
- Preterm Human Milk Composition A Systematic Literature ReviewDocumento13 páginasPreterm Human Milk Composition A Systematic Literature ReviewpuhumightAinda não há avaliações
- MJIRI v19n4p319 enDocumento4 páginasMJIRI v19n4p319 enpuhumightAinda não há avaliações
- Moog AG M-346 Brochure Mar15Documento4 páginasMoog AG M-346 Brochure Mar15puhumightAinda não há avaliações
- Development of Integrated Functional Monitoring and Warnings System For Saab 39 GripenDocumento7 páginasDevelopment of Integrated Functional Monitoring and Warnings System For Saab 39 GripenpuhumightAinda não há avaliações
- Foolishness Without Consequence? From Physical To Virtual Modeling in The History of Military Aircraft Development at SaabDocumento19 páginasFoolishness Without Consequence? From Physical To Virtual Modeling in The History of Military Aircraft Development at SaabpuhumightAinda não há avaliações
- Epilepsia - 2011 - Cendes - Vaccinations and Febrile SeizuresDocumento3 páginasEpilepsia - 2011 - Cendes - Vaccinations and Febrile SeizurespuhumightAinda não há avaliações
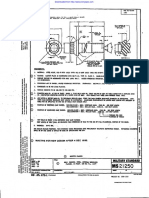
- MILITARY BOLT SPECIFICATIONDocumento3 páginasMILITARY BOLT SPECIFICATIONRubén Darío Becerra GalindoAinda não há avaliações
- Decision Support System For Fault Isolation of JAS 39 Gripen PDFDocumento71 páginasDecision Support System For Fault Isolation of JAS 39 Gripen PDFpuhumightAinda não há avaliações
- Diagnosis On A Principle PDFDocumento69 páginasDiagnosis On A Principle PDFpuhumightAinda não há avaliações
- Aermacchi M-346FA The Fighter AttackDocumento12 páginasAermacchi M-346FA The Fighter AttackpuhumightAinda não há avaliações
- Distribution of Cooling To Avionics PDFDocumento76 páginasDistribution of Cooling To Avionics PDFpuhumightAinda não há avaliações
- Diagnosis of The Air Distribution System of The JAS39 Gripen Environmental Control SystemDocumento59 páginasDiagnosis of The Air Distribution System of The JAS39 Gripen Environmental Control SystempuhumightAinda não há avaliações
- IAI - LAVI Fighter Evolution: Ovadia Harari Memorial LectureDocumento1 páginaIAI - LAVI Fighter Evolution: Ovadia Harari Memorial LecturepuhumightAinda não há avaliações
- 211799Documento12 páginas211799puhumightAinda não há avaliações
- Air Force Institute of Technology: Improving The Upt Student Follow-On Assignment Selection ProcessDocumento91 páginasAir Force Institute of Technology: Improving The Upt Student Follow-On Assignment Selection ProcesspuhumightAinda não há avaliações
- M-346 Flight Test ProgrammeDocumento10 páginasM-346 Flight Test ProgrammecoralonsoAinda não há avaliações
- F-22A Lightweight Gun System Comparison: NDIA Gun and Missile Systems Conference & ExhibitionDocumento17 páginasF-22A Lightweight Gun System Comparison: NDIA Gun and Missile Systems Conference & ExhibitionpuhumightAinda não há avaliações
- Eads (Dasa) At-2000 MakoDocumento8 páginasEads (Dasa) At-2000 MakopuhumightAinda não há avaliações
- Concept Definition: A Historical Perspective: (Based On A-10 Systems Engineering Case Study)Documento22 páginasConcept Definition: A Historical Perspective: (Based On A-10 Systems Engineering Case Study)puhumightAinda não há avaliações
- New Configurations For The Windshield and The Canopy For A Two-Seater Trainer Military AircraftDocumento8 páginasNew Configurations For The Windshield and The Canopy For A Two-Seater Trainer Military AircraftpuhumightAinda não há avaliações
- T-6A Texan II Systems Engineering Case StudyDocumento88 páginasT-6A Texan II Systems Engineering Case StudypuhumightAinda não há avaliações
- Aeroelastic Test and ValidationDocumento21 páginasAeroelastic Test and ValidationpuhumightAinda não há avaliações
- Aircraft Active Flutter Suppression: State of The Art and Technology Maturation NeedsDocumento41 páginasAircraft Active Flutter Suppression: State of The Art and Technology Maturation NeedspuhumightAinda não há avaliações
- Active content manual physics chapter measurementsDocumento57 páginasActive content manual physics chapter measurementspuhumightAinda não há avaliações
- ftft-OIO-ifc?: An Investigation of F/A-l 8 AMAD Gearbox Driveshaft VibrationDocumento101 páginasftft-OIO-ifc?: An Investigation of F/A-l 8 AMAD Gearbox Driveshaft VibrationpuhumightAinda não há avaliações
- Active content manual physics chapter measurementsDocumento57 páginasActive content manual physics chapter measurementspuhumightAinda não há avaliações
- Aerodynamic Model Tests of Exhaust Augmentors for F/A-18 EngineDocumento29 páginasAerodynamic Model Tests of Exhaust Augmentors for F/A-18 EnginepuhumightAinda não há avaliações
- Quiz Sistemas de AeronavesDocumento23 páginasQuiz Sistemas de AeronavesAllain CelyAinda não há avaliações
- Simulation Propylene PropaneDocumento6 páginasSimulation Propylene PropaneFabrizzio Renzo Chanco CapuchoAinda não há avaliações
- Periodic Table (Crystal Structure) - WikipediaDocumento5 páginasPeriodic Table (Crystal Structure) - WikipediaspritdummyAinda não há avaliações
- Module 6 (Materials & Hardware) SubModule 6.4 (Corrosion)Documento26 páginasModule 6 (Materials & Hardware) SubModule 6.4 (Corrosion)daniaAinda não há avaliações
- Archimedes Number ExplainedDocumento86 páginasArchimedes Number ExplainedRicardo Zevallos CruzAinda não há avaliações
- SGK Hoa Hoc 10 PDFDocumento176 páginasSGK Hoa Hoc 10 PDFAnkinNh100% (1)
- Panasonic tc-p50gt25 Chassis Gpf13du PDFDocumento122 páginasPanasonic tc-p50gt25 Chassis Gpf13du PDFMarco Antonio OrtegaAinda não há avaliações
- Tds Polintek L&P Plus For Metal-Dmi IndustriDocumento1 páginaTds Polintek L&P Plus For Metal-Dmi IndustriYosep SasadaAinda não há avaliações
- HL Paper 2: Full Electron Configuration of The Ruthenium (II) IonDocumento20 páginasHL Paper 2: Full Electron Configuration of The Ruthenium (II) IonfuduAinda não há avaliações
- Mass For Of: Scale Based On Resolution Mass Spectrometry Organic CompoundsDocumento9 páginasMass For Of: Scale Based On Resolution Mass Spectrometry Organic CompoundsoreamigAinda não há avaliações
- Philippine ResourcesDocumento24 páginasPhilippine ResourcesalexAinda não há avaliações
- Dot and Cross PracticeDocumento4 páginasDot and Cross PracticeDeez NutsAinda não há avaliações
- Reviewer in ChemistryDocumento8 páginasReviewer in ChemistryChristineManrique89% (9)
- Effects of Copper Pattern Density and Orientation On The Modulus of Bga SubstratesDocumento6 páginasEffects of Copper Pattern Density and Orientation On The Modulus of Bga SubstratesJuan BonottiAinda não há avaliações
- Int MSDocumento24 páginasInt MSCHAVAN VIJAYSINGH MOHANRAOAinda não há avaliações
- Snay Soler Part3Documento3 páginasSnay Soler Part3jajceAinda não há avaliações
- Rheology of suspensions and emulsions in pharmaceutical preparationsDocumento17 páginasRheology of suspensions and emulsions in pharmaceutical preparationsHaroon Rahim100% (3)
- TRIFU Disinfection - EnGDocumento10 páginasTRIFU Disinfection - EnGDenis RembrantAinda não há avaliações
- Diagnóstico Por Imagem - ThrallDocumento764 páginasDiagnóstico Por Imagem - ThrallMariana de Queiroz Sampaio100% (1)
- Lab 1 PH Conductivity TurbidityDocumento4 páginasLab 1 PH Conductivity TurbiditySumit Priyam67% (3)
- Crystalline and Amorphous SolidsDocumento10 páginasCrystalline and Amorphous SolidsAham GtyAinda não há avaliações
- Thermodynamic Process Problems and SolutionsDocumento4 páginasThermodynamic Process Problems and SolutionsAlex AndersAinda não há avaliações
- GlycoShell Longlife Concentrate Technical Data SheetDocumento2 páginasGlycoShell Longlife Concentrate Technical Data SheetEricAinda não há avaliações
- Combinepdf For Chem Answers PDFDocumento130 páginasCombinepdf For Chem Answers PDFRohan Agrawal 961Ainda não há avaliações
- Astm A 240-2020Documento12 páginasAstm A 240-2020Mohammed AliAinda não há avaliações
- 2 Staad DemoDocumento16 páginas2 Staad DemoDaylight ConsultantsAinda não há avaliações
- PMMA Zeta PotentialDocumento13 páginasPMMA Zeta Potentialpgkoutsoukos_7802726Ainda não há avaliações
- ES 311 - (Mechanics) SyllabusDocumento2 páginasES 311 - (Mechanics) SyllabusHarold TaylorAinda não há avaliações
- 2014-15 - I B.Tech I SemDocumento193 páginas2014-15 - I B.Tech I SemKrishna MurthyAinda não há avaliações
- Castrol Deformation RangtrainingDocumento32 páginasCastrol Deformation RangtrainingcotteAinda não há avaliações
- Joining of Metal and Non-Polar Polypropylene Composite Through A SimpleDocumento12 páginasJoining of Metal and Non-Polar Polypropylene Composite Through A SimpleFilipe PossamaiAinda não há avaliações