Você também pode gostar
- Set ExamDocumento18 páginasSet ExamManoj KumarAinda não há avaliações
- QTP Vs SeleniumDocumento5 páginasQTP Vs SeleniumbuntyavailableAinda não há avaliações
- Rank PG 2015Documento133 páginasRank PG 2015Gangatharan NarayananAinda não há avaliações
- Grammar BasicsDocumento2 páginasGrammar Basicsramya2212Ainda não há avaliações
- PEER Stage2 10.1080/03052150802506521Documento33 páginasPEER Stage2 10.1080/03052150802506521ramya2212Ainda não há avaliações
- Anna University UG PG Project FormatDocumento69 páginasAnna University UG PG Project Formatramya2212Ainda não há avaliações
- PR265Documento9 páginasPR265ramya2212Ainda não há avaliações
- Artigo ReferenciaDocumento13 páginasArtigo ReferenciaAnonymous zfC1zo9CAinda não há avaliações
- B7.17 HanDocumento2 páginasB7.17 Hanramya2212Ainda não há avaliações
- Shaft Design and Flywheel DimensioningDocumento13 páginasShaft Design and Flywheel DimensioningihtishamuddAinda não há avaliações
- Disk Measurements 07 05Documento20 páginasDisk Measurements 07 05ramya2212Ainda não há avaliações
- FM - Lautenschlager.confpro - Dac 3961.1997Documento12 páginasFM - Lautenschlager.confpro - Dac 3961.1997ramya2212Ainda não há avaliações
- Disc BrakeDocumento8 páginasDisc Brakesiddout20060% (1)
- Step by Step Guide For Modeling Heat Generation in A Disc BrakeDocumento20 páginasStep by Step Guide For Modeling Heat Generation in A Disc Brakeramya2212Ainda não há avaliações
- M1030Documento4 páginasM1030ramya2212Ainda não há avaliações
- HUMAN POWERED FLYWHEEL MOTOR-with-DATA PDFDocumento50 páginasHUMAN POWERED FLYWHEEL MOTOR-with-DATA PDFXeltorAinda não há avaliações
- The Application of Vortex Tubes To Refrigeration CyclesDocumento9 páginasThe Application of Vortex Tubes To Refrigeration Cyclesramya2212Ainda não há avaliações
- Pub 10530437Documento6 páginasPub 10530437ramya2212Ainda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Blackrock Methods of Delay AnalysisDocumento36 páginasBlackrock Methods of Delay AnalysisAhmed MoubarkAinda não há avaliações
- 7th Nani Palkhiwala Research Paper CompetitionDocumento31 páginas7th Nani Palkhiwala Research Paper CompetitionhridhaykhuranaAinda não há avaliações
- 1 Kane Equations - Example 1Documento8 páginas1 Kane Equations - Example 1Khisbullah HudhaAinda não há avaliações
- IGCSE Religious Studies (Edexcel - 2009 - Be Careful Not To Choose The New' IGCSE)Documento8 páginasIGCSE Religious Studies (Edexcel - 2009 - Be Careful Not To Choose The New' IGCSE)Robbie TurnerAinda não há avaliações
- Facility Layout Case StudyDocumento8 páginasFacility Layout Case StudyHitesh SinglaAinda não há avaliações
- Unit 8 Atomic Fluorescence Spectrometry PDFDocumento23 páginasUnit 8 Atomic Fluorescence Spectrometry PDFCh AswadAinda não há avaliações
- Working With Hierarchies External V08Documento9 páginasWorking With Hierarchies External V08Devesh ChangoiwalaAinda não há avaliações
- Republic of The Philippines Department of Education Deped Complex, Pasig City Science Iii K To 12 Curriculum Guide Planner / Budget of WorkDocumento3 páginasRepublic of The Philippines Department of Education Deped Complex, Pasig City Science Iii K To 12 Curriculum Guide Planner / Budget of WorkLedie Lou Cetoy SuperalesAinda não há avaliações
- Structure of An Atom Revision PaperDocumento5 páginasStructure of An Atom Revision PaperZoe Kim ChinguwaAinda não há avaliações
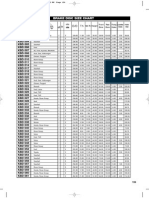
- Purchase Spec. For Bar (SB425)Documento4 páginasPurchase Spec. For Bar (SB425)Daison PaulAinda não há avaliações
- Learn To Write Chapter 1 ProposalDocumento52 páginasLearn To Write Chapter 1 Proposalrozaimihlp23Ainda não há avaliações
- Fastener Torque Charts: Phone: 1-800-558-2808 Fax: 1-800-553-8769Documento2 páginasFastener Torque Charts: Phone: 1-800-558-2808 Fax: 1-800-553-8769KOMATSU SHOVELAinda não há avaliações
- Term Paper - 2022964Documento17 páginasTerm Paper - 2022964Md. Ahbab HasanAinda não há avaliações
- Model Questions and Answers Macro EconomicsDocumento14 páginasModel Questions and Answers Macro EconomicsVrkAinda não há avaliações
- Arch Plan-Agner Boco (For Blue Print) - p1Documento1 páginaArch Plan-Agner Boco (For Blue Print) - p1Jay CeeAinda não há avaliações
- North-South Railway Project - South LineDocumento49 páginasNorth-South Railway Project - South LinesuperAinda não há avaliações
- Application List: Required Items: A: Cpu-95 Ignition ModuleDocumento12 páginasApplication List: Required Items: A: Cpu-95 Ignition ModuleShubra DebAinda não há avaliações
- Handout No. 03 - Purchase TransactionsDocumento4 páginasHandout No. 03 - Purchase TransactionsApril SasamAinda não há avaliações
- 5 Waves AnswersDocumento2 páginas5 Waves AnswersNoor Ulain NabeelaAinda não há avaliações
- Concept MapDocumento1 páginaConcept Mapapi-402935758Ainda não há avaliações
- Text Ranslation and TradicitonDocumento283 páginasText Ranslation and TradicitonSCAF55100% (4)
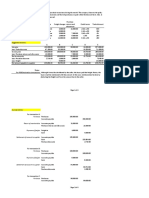
- Capital Structure UploadDocumento17 páginasCapital Structure UploadLakshmi Harshitha mAinda não há avaliações
- AP1 Q4 Ip9 v.02Documento4 páginasAP1 Q4 Ip9 v.02Fayenah Pacasum Mindalano100% (1)
- Heat Cured ElastomersDocumento40 páginasHeat Cured ElastomerslberrierAinda não há avaliações
- Wayne A. Thorp - Analyzing Supply & Demand Using Point & Figure Charts PDFDocumento5 páginasWayne A. Thorp - Analyzing Supply & Demand Using Point & Figure Charts PDFSrinivasAinda não há avaliações
- User Instructions: Installation Operation Maintenance NAF Duball DL Pocket ValveDocumento12 páginasUser Instructions: Installation Operation Maintenance NAF Duball DL Pocket ValveMauricio Contreras R.Ainda não há avaliações
- Questions 1Documento3 páginasQuestions 1krp_212003Ainda não há avaliações
- Musical InstrumentsDocumento23 páginasMusical Instrumentssirius scottAinda não há avaliações
- Former Rajya Sabha MP Ajay Sancheti Appeals Finance Minister To Create New Laws To Regulate Cryptocurrency MarketDocumento3 páginasFormer Rajya Sabha MP Ajay Sancheti Appeals Finance Minister To Create New Laws To Regulate Cryptocurrency MarketNation NextAinda não há avaliações
- My Initial Action Research PlanDocumento3 páginasMy Initial Action Research PlanKarl Kristian Embido100% (8)