Você também pode gostar
- Lectures 1 - 10 Introduction To Classical Mechanics: Prof. N. Harnew University of Oxford MT 2016Documento102 páginasLectures 1 - 10 Introduction To Classical Mechanics: Prof. N. Harnew University of Oxford MT 2016ARGHYADEEP NAGAinda não há avaliações
- Pendahuluan VektorDocumento25 páginasPendahuluan Vektorsalsa bilaAinda não há avaliações
- Lecture1 HandoutDocumento12 páginasLecture1 HandoutTriết MinhAinda não há avaliações
- QuantumDocumento16 páginasQuantumTo Get HerAinda não há avaliações
- Quantum Mechanics Lectures NoteDocumento69 páginasQuantum Mechanics Lectures NoteNirmalya NandiAinda não há avaliações
- The Advanced Geometry of Plane Curves and Their ApplicationsNo EverandThe Advanced Geometry of Plane Curves and Their ApplicationsAinda não há avaliações
- Schwarz DFT-LAPW PDFDocumento90 páginasSchwarz DFT-LAPW PDFAnwar Ul HaqAinda não há avaliações
- Ts 2Documento2 páginasTs 2ved patilAinda não há avaliações
- (13148710 - Journal of Theoretical and Applied Mechanics) Mechanical Systems of Cosserat-ZhilinDocumento16 páginas(13148710 - Journal of Theoretical and Applied Mechanics) Mechanical Systems of Cosserat-ZhilinAhmed HussainAinda não há avaliações
- Relativity v1.2Documento13 páginasRelativity v1.2hassaedi5263Ainda não há avaliações
- AD01 - Basic Concepts in DynamicsDocumento9 páginasAD01 - Basic Concepts in DynamicscooLkiD1412Ainda não há avaliações
- Lecture Notes On Quantum MechanicsDocumento391 páginasLecture Notes On Quantum MechanicslymanalphaAinda não há avaliações
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsAinda não há avaliações
- QMGreensite PDFDocumento391 páginasQMGreensite PDFKiran AdhikariAinda não há avaliações
- Mechanics Explained in Seven Pages: Excerpt From The No Bullshit Guide To Math and Physics by Ivan SavovDocumento8 páginasMechanics Explained in Seven Pages: Excerpt From The No Bullshit Guide To Math and Physics by Ivan SavovatifchaudhryAinda não há avaliações
- Lecture Guide in Vector AnalysisDocumento13 páginasLecture Guide in Vector AnalysiskennethAinda não há avaliações
- Week3 PDFDocumento39 páginasWeek3 PDFOverHorizon shameAinda não há avaliações
- Notes On Transport PhenomenaDocumento184 páginasNotes On Transport PhenomenarajuvadlakondaAinda não há avaliações
- CM AllDocumento47 páginasCM AllJun Rey LincunaAinda não há avaliações
- Problem Set 1Documento2 páginasProblem Set 1MachodogAinda não há avaliações
- APhO2001 Theory Prob 2Documento2 páginasAPhO2001 Theory Prob 2Popovici DraganAinda não há avaliações
- HW 2Documento3 páginasHW 2Prajita RoyAinda não há avaliações
- Universidad Nacional de Colombia Electrodin Amica - II (II-2015) Ejercicios: Lista 1Documento26 páginasUniversidad Nacional de Colombia Electrodin Amica - II (II-2015) Ejercicios: Lista 1carcon_10Ainda não há avaliações
- Born 1925 EngDocumento30 páginasBorn 1925 EngFranz SchindlerAinda não há avaliações
- MTH 282 Vetorial MechanicsDocumento61 páginasMTH 282 Vetorial MechanicsOluwafisayo B. AyoadeAinda não há avaliações
- Prelimexam Jan 2018 Thur FriDocumento14 páginasPrelimexam Jan 2018 Thur FriAyushAinda não há avaliações
- Classical MechanicsDocumento15 páginasClassical MechanicsPengintaiAinda não há avaliações
- Continuum Mechanics: Concise Theory and ProblemsNo EverandContinuum Mechanics: Concise Theory and ProblemsNota: 3.5 de 5 estrelas3.5/5 (3)
- Lecture 1b: Basic Principles: Relativity, Maxwell's Equation's, and Accelerator Coordinate SystemsDocumento21 páginasLecture 1b: Basic Principles: Relativity, Maxwell's Equation's, and Accelerator Coordinate SystemsmertsekerciAinda não há avaliações
- Elements of Electromagnetics Third Edition E Book Chapter 01Documento26 páginasElements of Electromagnetics Third Edition E Book Chapter 01Yepuru ChaithanyaAinda não há avaliações
- Six Dimension Relativity (Modification of Relativity and Dimension ExpansionDocumento5 páginasSix Dimension Relativity (Modification of Relativity and Dimension ExpansionidachemAinda não há avaliações
- Engineering Mechanics IDocumento57 páginasEngineering Mechanics IsouhailAinda não há avaliações
- Chapter1 Quantum Book v1Documento22 páginasChapter1 Quantum Book v1Ameya TambeAinda não há avaliações
- PHY105 Problem Set 1Documento4 páginasPHY105 Problem Set 1Andrew TaoAinda não há avaliações
- Lecture 1Documento8 páginasLecture 1Min TangAinda não há avaliações
- Tachyons, Quanta and ChaosDocumento25 páginasTachyons, Quanta and ChaosJoshua TheGod StinsonAinda não há avaliações
- Vector Analysis: 1.1 Scalars and VectorsDocumento9 páginasVector Analysis: 1.1 Scalars and VectorsJoel DsouzaAinda não há avaliações
- Vector Analysis: 1.1 Scalars and VectorsDocumento9 páginasVector Analysis: 1.1 Scalars and VectorsJoel DsouzaAinda não há avaliações
- Vector Analysis: 1.1 Scalars and VectorsDocumento9 páginasVector Analysis: 1.1 Scalars and VectorsJoel DsouzaAinda não há avaliações
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11No EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Ainda não há avaliações
- KellerDocumento10 páginasKelleravanomminerAinda não há avaliações
- Vector Addition and Subtraction Analytical Methods 10Documento19 páginasVector Addition and Subtraction Analytical Methods 10Jason Doctolero HolgadoAinda não há avaliações
- PH2210: Quantum Mechanics: Physics Department, Royal Holloway, University of LondonDocumento5 páginasPH2210: Quantum Mechanics: Physics Department, Royal Holloway, University of LondonPhyo ThihaAinda não há avaliações
- HW Pso201 2020Documento6 páginasHW Pso201 2020Shashi KumarAinda não há avaliações
- How To: Minkowski DiagramsDocumento4 páginasHow To: Minkowski DiagramsDerek StamponeAinda não há avaliações
- Fundamentals of DynamicsDocumento20 páginasFundamentals of DynamicsSaurabh SkuniverseAinda não há avaliações
- DFT Workshop TU WienDocumento90 páginasDFT Workshop TU WienRavindra KempaiahAinda não há avaliações
- Chapter-1 VectorsDocumento6 páginasChapter-1 VectorsMd Najmul HudaAinda não há avaliações
- Spring 2011 Qualifying Exam: - 34 - 34 - 23 - 19 A 23 8 e - 31 P - 27 N - 27 0 - 11 C e - 12 0 - 7 2 0 0 2 - 11 3 2 - 8 - 2 - 4 W - 3Documento4 páginasSpring 2011 Qualifying Exam: - 34 - 34 - 23 - 19 A 23 8 e - 31 P - 27 N - 27 0 - 11 C e - 12 0 - 7 2 0 0 2 - 11 3 2 - 8 - 2 - 4 W - 3rujintoAinda não há avaliações
- 04 LAJPE 782 ChudinovDocumento5 páginas04 LAJPE 782 Chudinovbenitogaldos19gmail.comAinda não há avaliações
- Geomop1 PDFDocumento35 páginasGeomop1 PDFpingliAinda não há avaliações
- Format Window 7 UltimateDocumento14 páginasFormat Window 7 UltimatepingliAinda não há avaliações
- Format Window 7 UltimateDocumento14 páginasFormat Window 7 UltimatepingliAinda não há avaliações
- How Does Light Speed Back Up After Being Slowed by The GlassDocumento1 páginaHow Does Light Speed Back Up After Being Slowed by The GlasspingliAinda não há avaliações
- Learning Chinese: A Foundation Course IN MandarinDocumento135 páginasLearning Chinese: A Foundation Course IN MandarinDos-peter John Bilbao87% (15)
- Format Window 7 UltimateDocumento14 páginasFormat Window 7 UltimatepingliAinda não há avaliações
- 20 - Method of CharacteristicsDocumento28 páginas20 - Method of CharacteristicspingliAinda não há avaliações
- Learning Chinese: A Foundation Course IN MandarinDocumento135 páginasLearning Chinese: A Foundation Course IN MandarinDos-peter John Bilbao87% (15)
- Chinese Language IslamDocumento20 páginasChinese Language IslampingliAinda não há avaliações
- Learning Chinese: A Foundation Course IN MandarinDocumento135 páginasLearning Chinese: A Foundation Course IN MandarinDos-peter John Bilbao87% (15)
- Learning Chinese: A Foundation Course IN MandarinDocumento135 páginasLearning Chinese: A Foundation Course IN MandarinDos-peter John Bilbao87% (15)
- Research Application Booklet Aug10Jan11eDocumento44 páginasResearch Application Booklet Aug10Jan11epingliAinda não há avaliações
- The Numerical Method of Characteristics For Hyperbolic Problems in Three Independent VariablesDocumento15 páginasThe Numerical Method of Characteristics For Hyperbolic Problems in Three Independent VariablespingliAinda não há avaliações
- m3414 1Documento698 páginasm3414 1pingliAinda não há avaliações
- 349737Documento16 páginas349737Lukkana VaraprasadAinda não há avaliações
- Matlab Codes For Method of CharacteristicsDocumento11 páginasMatlab Codes For Method of Characteristicsaeroacademic50% (2)
- The Numerical Method of Characteristics For Hyperbolic Problems in Three Independent VariablesDocumento15 páginasThe Numerical Method of Characteristics For Hyperbolic Problems in Three Independent VariablespingliAinda não há avaliações
- Design of A Supersonic NozzleDocumento39 páginasDesign of A Supersonic NozzlepingliAinda não há avaliações
- Young ThesisDocumento128 páginasYoung ThesisMuhammad Ishaq KhanAinda não há avaliações
- Fem WaterDocumento151 páginasFem WaterpingliAinda não há avaliações
- Fundamentals of Multiphase FlowDocumento410 páginasFundamentals of Multiphase FlowF.L.YAinda não há avaliações
- Man 58219Documento18 páginasMan 58219pingliAinda não há avaliações
- Characteristic MethodDocumento11 páginasCharacteristic MethodmassooudAinda não há avaliações
- Design and Optimization of 3D Radial Slot Grain ConfigurationDocumento7 páginasDesign and Optimization of 3D Radial Slot Grain ConfigurationpingliAinda não há avaliações
- International ScholarshipsDocumento41 páginasInternational ScholarshipsFarhan_Raza_187100% (1)
- Modern Control Theory: Ad DamenDocumento163 páginasModern Control Theory: Ad Damensoundaram11Ainda não há avaliações
- Analisis Geometri Yang Diterapkan Pada Mahasiswa - Id.enDocumento7 páginasAnalisis Geometri Yang Diterapkan Pada Mahasiswa - Id.enCindy OfficialAinda não há avaliações
- Comparison of Models For Estimating Magnetic Core Losses in Electrical Machines Using The Finite-Element MethodDocumento10 páginasComparison of Models For Estimating Magnetic Core Losses in Electrical Machines Using The Finite-Element MethodSuda KrishnarjunaraoAinda não há avaliações
- Manual SIMIT Basic LibrayDocumento0 páginaManual SIMIT Basic LibraymwidgerAinda não há avaliações
- CE5601-CE5010-Lecture 1Documento34 páginasCE5601-CE5010-Lecture 1OmaidTanhaAinda não há avaliações
- Amperes Law of ForceDocumento4 páginasAmperes Law of ForceAli khan7Ainda não há avaliações
- Mechanics TabletDocumento390 páginasMechanics TabletAzad EmmanuelAinda não há avaliações
- Hydro 36 37 PDFDocumento24 páginasHydro 36 37 PDFMuhammad Rafi RenaldyAinda não há avaliações
- Capitulo3 Gillat PDFDocumento8 páginasCapitulo3 Gillat PDFluis fernando riojas pecheAinda não há avaliações
- Q4 From BrainlyDocumento5 páginasQ4 From BrainlykarthikAinda não há avaliações
- Slide Ch12 Kinematics of ParticlesDocumento136 páginasSlide Ch12 Kinematics of ParticlesShahrul ShafiqAinda não há avaliações
- Addition of A System of Coplanar ForcesDocumento4 páginasAddition of A System of Coplanar ForcesRobert WalusimbiAinda não há avaliações
- Part EM - Classical ElectrodynamicsDocumento415 páginasPart EM - Classical Electrodynamicsapoorva singhAinda não há avaliações
- Introduction To Structural Mechanics BookDocumento122 páginasIntroduction To Structural Mechanics Bookdkaviti92% (12)
- Teacher's Resource Book 1Documento248 páginasTeacher's Resource Book 1Fazi Imi62% (13)
- Line, Area, Volume, and Surface IntegralsDocumento27 páginasLine, Area, Volume, and Surface IntegralszcqsmcmAinda não há avaliações
- Chapter 07 - Vectors-And-Dot ProductsDocumento23 páginasChapter 07 - Vectors-And-Dot ProductsPete RodrigueAinda não há avaliações
- Vector Calculus - Lecture - 1Documento157 páginasVector Calculus - Lecture - 1Jeeya ShahAinda não há avaliações
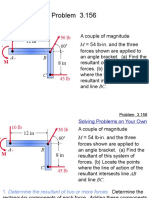
- Problem 3.156: 30 LB 10 LBDocumento7 páginasProblem 3.156: 30 LB 10 LBCurt De CastroAinda não há avaliações
- Analysis of A Complex of Statistical Variables Into Principal ComponentsDocumento25 páginasAnalysis of A Complex of Statistical Variables Into Principal ComponentsAhhhhhhhAinda não há avaliações
- Fort ST 2021 3U Trials & SolutionsDocumento20 páginasFort ST 2021 3U Trials & SolutionspotpalAinda não há avaliações
- Teaching Pack Coplanar Forces v2.0Documento20 páginasTeaching Pack Coplanar Forces v2.0Karen TubbyAinda não há avaliações
- Math3974 2004 ExamDocumento5 páginasMath3974 2004 ExamMarcus LiAinda não há avaliações
- Padhle 11th - KInematics NotesDocumento42 páginasPadhle 11th - KInematics NotesNavy bhatraAinda não há avaliações
- Increase Resolution of Optical EncodersDocumento6 páginasIncrease Resolution of Optical EncodersYoussef AbbasAinda não há avaliações
- EMTL Lecture NotesDocumento210 páginasEMTL Lecture Notesnadheera ayishaAinda não há avaliações
- 1 PDFDocumento9 páginas1 PDFAka NainAinda não há avaliações
- EKF QuaternionDocumento11 páginasEKF QuaternionJosh PilipovskyAinda não há avaliações
- Test Bank For College Physics Reasoning and Relationships 2nd EditionDocumento24 páginasTest Bank For College Physics Reasoning and Relationships 2nd Editionalexiscastillorbtjcdazng100% (49)
- Pure Mathematics 1 TEXT BOOK (4th Edition 1985-Backhouse)Documento599 páginasPure Mathematics 1 TEXT BOOK (4th Edition 1985-Backhouse)Melvin TusiimeIsaac91% (22)
- NCERT Solutions For Class 11th: CH 4 Motion in A Plane Physics ScienceDocumento33 páginasNCERT Solutions For Class 11th: CH 4 Motion in A Plane Physics ScienceDrRajesh ShrotriyaAinda não há avaliações