Você também pode gostar
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNota: 2 de 5 estrelas2/5 (1)
- SPWM-based D - Digital Control For Paralleled 3 - Grid-Connected Inverters PDFDocumento7 páginasSPWM-based D - Digital Control For Paralleled 3 - Grid-Connected Inverters PDF张明Ainda não há avaliações
- DTC-SVM Scheme For Induction Motors Fed With A Three-Level InverterDocumento5 páginasDTC-SVM Scheme For Induction Motors Fed With A Three-Level Inverterdam_dar666Ainda não há avaliações
- 7 PDFDocumento9 páginas7 PDFRevuAinda não há avaliações
- Neumann 2010Documento6 páginasNeumann 2010هبهوب محمدAinda não há avaliações
- Predictive Current Control of A Back-to-Back NPC Wind Energy Conversion System To Meet Low Voltage Ride-Through RequirementsDocumento6 páginasPredictive Current Control of A Back-to-Back NPC Wind Energy Conversion System To Meet Low Voltage Ride-Through RequirementsjimylihAinda não há avaliações
- IC 20 SPSingh ICPCES2012 RajneeshDocumento6 páginasIC 20 SPSingh ICPCES2012 RajneeshEmmanuel ZangueAinda não há avaliações
- Model Predictive Control of Grid-Tied Four-Level Diode-Clamped Inverters For High Power Wind Energy Conversion SystemsDocumento13 páginasModel Predictive Control of Grid-Tied Four-Level Diode-Clamped Inverters For High Power Wind Energy Conversion Systemschikha saidAinda não há avaliações
- Low Voltage Ride ThroughDocumento6 páginasLow Voltage Ride ThroughMona ValikhaniAinda não há avaliações
- A New Method For Voltage and Frequency Control of Stand-Alone Self-Excited Induction Generator Using PWM Converter With Variable DC Link VoltageDocumento6 páginasA New Method For Voltage and Frequency Control of Stand-Alone Self-Excited Induction Generator Using PWM Converter With Variable DC Link VoltageGomaa Haroun AliAinda não há avaliações
- DC Link Voltage Control of Back-To-Back ConverterDocumento6 páginasDC Link Voltage Control of Back-To-Back ConverterRoshan PradhanAinda não há avaliações
- Real-Time Digital Simulation of A VSC-connected Offshore Wind FarmDocumento7 páginasReal-Time Digital Simulation of A VSC-connected Offshore Wind Farmpreeti200726Ainda não há avaliações
- Dynamic Model and Simulation of Doubly Feed Induction: Generator Wind TurbineDocumento5 páginasDynamic Model and Simulation of Doubly Feed Induction: Generator Wind TurbineSandeepKumarAinda não há avaliações
- Wide Input Voltage Range High Step-Up DC-DC Converter With Fault-Tolerant Operation CapabilityDocumento6 páginasWide Input Voltage Range High Step-Up DC-DC Converter With Fault-Tolerant Operation Capabilityjeos20132013Ainda não há avaliações
- Fault Analysis of Distribution Network With Wind Turbines of DFIGDocumento5 páginasFault Analysis of Distribution Network With Wind Turbines of DFIGalaaa3Ainda não há avaliações
- DTC Control of DFIG-Generators For Wind Turbines FPGA Implementation BasedDocumento6 páginasDTC Control of DFIG-Generators For Wind Turbines FPGA Implementation BasedJevin ZackAinda não há avaliações
- The Dynamic Model of Doubly-Fed Induction Generator Based On Wind TurbineDocumento5 páginasThe Dynamic Model of Doubly-Fed Induction Generator Based On Wind TurbineKubendra RaoAinda não há avaliações
- 1.cascaded Two-Level Inverter-Based Multilevel STATCOM For High-Power ApplicationsDocumento9 páginas1.cascaded Two-Level Inverter-Based Multilevel STATCOM For High-Power ApplicationsSivareddy MudiyalaAinda não há avaliações
- Roman Bluhm - Repower - Enhanced Features of DFIG Wind Energy Converters Regarding New Grid Code RequirementsDocumento6 páginasRoman Bluhm - Repower - Enhanced Features of DFIG Wind Energy Converters Regarding New Grid Code Requirementsmali_me12Ainda não há avaliações
- A D-Q Synchronous Frame Controller For Single Phase InverterDocumento7 páginasA D-Q Synchronous Frame Controller For Single Phase InvertershanAinda não há avaliações
- Simulation of VSC Based HVDC Transmission System For The IntegratDocumento5 páginasSimulation of VSC Based HVDC Transmission System For The IntegratManideep AdepuAinda não há avaliações
- Study of Direct Torque Controlled 3-Phase SCIM With Two and Three-Level Inverters Using ST-DTC and FR-DTC SchemeDocumento5 páginasStudy of Direct Torque Controlled 3-Phase SCIM With Two and Three-Level Inverters Using ST-DTC and FR-DTC SchemeAbo KikiAinda não há avaliações
- 3143 PDFDocumento5 páginas3143 PDFSalas gamerAinda não há avaliações
- Discontinuous SVPWM TechniquesDocumento6 páginasDiscontinuous SVPWM TechniquesAnonymous 1D3dCWNcAinda não há avaliações
- تنزيلDocumento10 páginasتنزيلMohammed Saci ChabaniAinda não há avaliações
- Control of Permanent-Magnet Generators Applied To Variable-Speed Wind-Energy Systems Connected To The GridDocumento6 páginasControl of Permanent-Magnet Generators Applied To Variable-Speed Wind-Energy Systems Connected To The GridNam GiangAinda não há avaliações
- Inverter Distributed: Controller Generation SystemsDocumento7 páginasInverter Distributed: Controller Generation SystemsJohnAinda não há avaliações
- Ozsoy A Novel Current Controller Scheme For Doubly Fed Induction GeneratorsDocumento10 páginasOzsoy A Novel Current Controller Scheme For Doubly Fed Induction GeneratorsdankorankoAinda não há avaliações
- International Journal of Electrical Power and Energy SystemsDocumento16 páginasInternational Journal of Electrical Power and Energy SystemsMøHämêdZãķârįäAinda não há avaliações
- Distribution System DesignDocumento6 páginasDistribution System DesignMAcryan Pacquiao PactolAinda não há avaliações
- 05984362Documento6 páginas05984362muralimallikaAinda não há avaliações
- Carrier Based Sinusodial PWM Scheme For The Nine Switch ConverterDocumento6 páginasCarrier Based Sinusodial PWM Scheme For The Nine Switch ConverterShankar MukalAinda não há avaliações
- CH 5 - AC-AC ConvertersDocumento22 páginasCH 5 - AC-AC ConvertersGebremichael Teklay GebretsadikAinda não há avaliações
- Islanding Detection Algorithm For Inverter Based Distributed Generation Using Positive Sequence of Load VoltageDocumento4 páginasIslanding Detection Algorithm For Inverter Based Distributed Generation Using Positive Sequence of Load VoltageRama KrishnaAinda não há avaliações
- Isie 2000 930468Documento9 páginasIsie 2000 930468AK KhanAinda não há avaliações
- Capacitor SwitchingDocumento5 páginasCapacitor SwitchingbhuvanesbraveAinda não há avaliações
- Imp - A Survey On Neutral-Point-Clamped InvertersDocumento12 páginasImp - A Survey On Neutral-Point-Clamped InvertersVenkataramdas BonamAinda não há avaliações
- An Efficient and High-Gain Inverter BaseDocumento11 páginasAn Efficient and High-Gain Inverter BasertsridhareeeAinda não há avaliações
- Adrc IetDocumento6 páginasAdrc IetDileep VarmaAinda não há avaliações
- Transformer-Less Dynamic Voltage Restorer For Voltage Sag CompensationDocumento6 páginasTransformer-Less Dynamic Voltage Restorer For Voltage Sag CompensationSwathi PrasadAinda não há avaliações
- Ts Boost ConverterDocumento6 páginasTs Boost Converterala houamAinda não há avaliações
- A Common-Mode Voltage Reduction Strategy For ADocumento6 páginasA Common-Mode Voltage Reduction Strategy For Amalini72Ainda não há avaliações
- Chithra ConferenceDocumento6 páginasChithra Conferencem.rathi meenaAinda não há avaliações
- Zhao. Space Vector PWM Control of Dual Three-Phase Induction Machine Using Vector Space DecompositionDocumento10 páginasZhao. Space Vector PWM Control of Dual Three-Phase Induction Machine Using Vector Space DecompositionAnonymous 1D3dCWNcAinda não há avaliações
- Control of A Wind Energy Conversion System Associated To A Flywheel Energy Storage SystemDocumento6 páginasControl of A Wind Energy Conversion System Associated To A Flywheel Energy Storage SystemhassenbbAinda não há avaliações
- IET Renewable Power Gen - 2013 - Lei - Doubly Fed Induction Generator Wind Turbine Modelling For Detailed ElectromagneticDocumento10 páginasIET Renewable Power Gen - 2013 - Lei - Doubly Fed Induction Generator Wind Turbine Modelling For Detailed ElectromagneticSuba ShiniAinda não há avaliações
- Fast Direct Torque Control of An Open-End Induction Motor Drive Using 12-Sided Polygonal Voltage Space VectorsDocumento11 páginasFast Direct Torque Control of An Open-End Induction Motor Drive Using 12-Sided Polygonal Voltage Space VectorsMuhammad UmarAinda não há avaliações
- Study of Reactive Power Compensation Using Static Var CompenstorDocumento5 páginasStudy of Reactive Power Compensation Using Static Var CompenstorZohaib AmjadAinda não há avaliações
- Wind TurbineDocumento5 páginasWind TurbineAnthony WellsAinda não há avaliações
- Control of Simplified Multilevel AC-DC-AC Converter For Small Power Generation SystemsDocumento6 páginasControl of Simplified Multilevel AC-DC-AC Converter For Small Power Generation SystemsAstrid BelloAinda não há avaliações
- 29-04-2021-1619695224-6-Ijeee-3. Ijeee - Low Voltage Ride Through of A Grid Connected Doubly Fed Induction Generator With Field Oriented ControlDocumento16 páginas29-04-2021-1619695224-6-Ijeee-3. Ijeee - Low Voltage Ride Through of A Grid Connected Doubly Fed Induction Generator With Field Oriented Controliaset123Ainda não há avaliações
- 1 110-04 PDFDocumento8 páginas1 110-04 PDFAkinbode Sunday OluwagbengaAinda não há avaliações
- Modeling and Control of A Doubly-Fed Induction Generator (DFIG) Wind Power Generation System For Real-Time SimulationsDocumento9 páginasModeling and Control of A Doubly-Fed Induction Generator (DFIG) Wind Power Generation System For Real-Time Simulationsmlsawhney2996Ainda não há avaliações
- 2019 - Sensor Fault-Tolerant Control of DFIG Based Wind Energy Conversion SystemsDocumento15 páginas2019 - Sensor Fault-Tolerant Control of DFIG Based Wind Energy Conversion SystemsNguyen Thanh HaiAinda não há avaliações
- Zaratushtra, 816-FinalDocumento9 páginasZaratushtra, 816-FinalCao Đức HuyAinda não há avaliações
- Wide Frequency Range Voltage Controlled Ring Oscillators Based On Transmission GatesDocumento4 páginasWide Frequency Range Voltage Controlled Ring Oscillators Based On Transmission GatesRam MAinda não há avaliações
- Space Vector PWM Control of Dual Three-Phase Induction Machine Using Vector Space DecompositionDocumento10 páginasSpace Vector PWM Control of Dual Three-Phase Induction Machine Using Vector Space DecompositionSHUBHAM DABRALAinda não há avaliações
- Boukhriss IC2INT'13Documento5 páginasBoukhriss IC2INT'13Ali BOUKHRISSAinda não há avaliações
- 1 s2.0 S1876610213017268 Main PDFDocumento10 páginas1 s2.0 S1876610213017268 Main PDFMaroju Santosh KiranAinda não há avaliações
- Doubly-Fed Induction Generator Control For Variable-Speed Wind Power Generation SystemDocumento5 páginasDoubly-Fed Induction Generator Control For Variable-Speed Wind Power Generation SystemB Vijay VihariAinda não há avaliações
- Easytutorial - In: Placement Paper - Infosys Paper - IIIDocumento12 páginasEasytutorial - In: Placement Paper - Infosys Paper - IIIRevuAinda não há avaliações
- LogarithmDocumento2 páginasLogarithmRevuAinda não há avaliações
- Easytutorial - In: Placement Paper - Infosys Paper - IIDocumento9 páginasEasytutorial - In: Placement Paper - Infosys Paper - IIRevu100% (1)
- SyllogismDocumento5 páginasSyllogismRevuAinda não há avaliações
- 1 - 1 AE (Elec.) (NHK) - FSL New PDFDocumento11 páginas1 - 1 AE (Elec.) (NHK) - FSL New PDFRevu0% (1)
- Eticket: Bangalore Tuesday, July 24, 2018Documento2 páginasEticket: Bangalore Tuesday, July 24, 2018RevuAinda não há avaliações
- A Spiral Development Model For An Advanced Traffic PDFDocumento6 páginasA Spiral Development Model For An Advanced Traffic PDFRevuAinda não há avaliações
- Generator Topologies With Power Electronics Converters For A Wind Energy Conversion System: A ReviewDocumento7 páginasGenerator Topologies With Power Electronics Converters For A Wind Energy Conversion System: A ReviewRevuAinda não há avaliações
- Fulltext01 PDFDocumento79 páginasFulltext01 PDFRevuAinda não há avaliações
- 11ref PDFDocumento4 páginas11ref PDFRevuAinda não há avaliações
- Non Linear Control of A Doubly Fed Induction Generator in Wind TurbinesDocumento6 páginasNon Linear Control of A Doubly Fed Induction Generator in Wind TurbinesRevuAinda não há avaliações
- 3sun M40Documento2 páginas3sun M40Anselmo Aguado cortesAinda não há avaliações
- Page 25 of 69Documento5 páginasPage 25 of 69wahyu widartoAinda não há avaliações
- Switch - Disconnector Base Mounting: 2P - 3P - 3P+NDocumento9 páginasSwitch - Disconnector Base Mounting: 2P - 3P - 3P+NVildanAinda não há avaliações
- Miniaturization of A Microstrip Antenna Using A Compact and Thin Magneto-Dielectric SubstrateDocumento3 páginasMiniaturization of A Microstrip Antenna Using A Compact and Thin Magneto-Dielectric SubstrateaparnaAinda não há avaliações
- Module 3 - Weight-Volume RelationshipDocumento31 páginasModule 3 - Weight-Volume RelationshipkaicaAinda não há avaliações
- PC1431 Assignment 1 AnswersDocumento30 páginasPC1431 Assignment 1 AnswersMikael Lee88% (8)
- BTS443P Smart Highside Power SwitchDocumento15 páginasBTS443P Smart Highside Power SwitchLuis N. Montiel V.Ainda não há avaliações
- Rojas 02-12-2023 20.08Documento17 páginasRojas 02-12-2023 20.08Juphil PletoAinda não há avaliações
- Kaiser - Electromagnetic Compatibility Handbook - ToCDocumento18 páginasKaiser - Electromagnetic Compatibility Handbook - ToCbodymorph20% (5)
- Application Problems 1Documento3 páginasApplication Problems 1DianaLaura AlvarezAinda não há avaliações
- 9709 w15 QP 41Documento4 páginas9709 w15 QP 41yuke kristinaAinda não há avaliações
- Description Mechanical Dimensions: 6.8V To 400V GPP Transient Voltage SuppressorsDocumento4 páginasDescription Mechanical Dimensions: 6.8V To 400V GPP Transient Voltage SuppressorsRabshaqaAinda não há avaliações
- 1 s2.0 S0306261918311140 MainDocumento11 páginas1 s2.0 S0306261918311140 MainAllal BouzidAinda não há avaliações
- Energy Transfer in TurbomachinesDocumento60 páginasEnergy Transfer in TurbomachinesBasavaraja K M Kotyal83% (6)
- Chapter 2 Exercises Part2Documento2 páginasChapter 2 Exercises Part2Cedric MunlawinAinda não há avaliações
- Dynamic of Bow RotorDocumento20 páginasDynamic of Bow Rotormh1999Ainda não há avaliações
- RLC ExamplesDocumento25 páginasRLC ExamplesAbel LopezAinda não há avaliações
- Total Power Int'L: S2A00R Series 3 Watt Low Cost DIP DC/DC Converters Single & Dual OutputDocumento4 páginasTotal Power Int'L: S2A00R Series 3 Watt Low Cost DIP DC/DC Converters Single & Dual OutputsaberAinda não há avaliações
- Data Sheet - GBL Tag No. P309A P-ADocumento7 páginasData Sheet - GBL Tag No. P309A P-ARajendra GuptaAinda não há avaliações
- Aits 1819 FT Ix Jeea Paper 1 PCM SolnsDocumento14 páginasAits 1819 FT Ix Jeea Paper 1 PCM SolnsKartik Gupta100% (1)
- Design and Development of Shunt Active Filter Using MATLAB For Minimization of HarmonicsDocumento5 páginasDesign and Development of Shunt Active Filter Using MATLAB For Minimization of HarmonicsKafeelKhanAinda não há avaliações
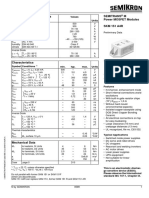
- Absolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RDocumento5 páginasAbsolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RChaovalit Jitsinthu100% (1)
- Chapter 2 - Losses in Piping SystemsDocumento30 páginasChapter 2 - Losses in Piping SystemsNicholas EmildasAinda não há avaliações
- Cow SpreadsheetDocumento28 páginasCow SpreadsheetSunilGangwarAinda não há avaliações
- 1.experiment On Single Rotor SystemDocumento8 páginas1.experiment On Single Rotor SystemRahul Kumar DwivediAinda não há avaliações
- Coal Analysis For vtps-500MWDocumento90 páginasCoal Analysis For vtps-500MWJagadeesh NetiAinda não há avaliações
- ESD User Handbook Rev2Documento12 páginasESD User Handbook Rev2Amit B Kolekar100% (1)
- HoneyWell 69-1815EFSDocumento96 páginasHoneyWell 69-1815EFSRemiAinda não há avaliações
- Smart Power Generation by Wasted HeatDocumento5 páginasSmart Power Generation by Wasted HeatVedant ChoudharyAinda não há avaliações
- Mid - 1 Atd-2Documento1 páginaMid - 1 Atd-2Bhlp RajuAinda não há avaliações