Você também pode gostar
- 1SM6 2015Documento63 páginas1SM6 2015chikoo499Ainda não há avaliações
- Countering Violent Extremism PDFDocumento42 páginasCountering Violent Extremism PDFtrompitas67Ainda não há avaliações
- Gabbay 1999 Corporate Social Capital and LiabilityDocumento559 páginasGabbay 1999 Corporate Social Capital and LiabilityKumar SaurabhAinda não há avaliações
- 2019 - 2 - Fake News Detection On Social Media Using Geometric Deep LearningDocumento15 páginas2019 - 2 - Fake News Detection On Social Media Using Geometric Deep LearningHassan AliAinda não há avaliações
- Properties of Skeletal MuscleDocumento72 páginasProperties of Skeletal MuscleAakash GohilAinda não há avaliações
- Law As A Command of SovereignDocumento12 páginasLaw As A Command of SovereignAdv BL Dewasi100% (2)
- PreviewpdfDocumento50 páginasPreviewpdfMarcosGouvea100% (1)
- Fake Information Detection by Gaining Knowledge of The Usage of Machine LearningDocumento5 páginasFake Information Detection by Gaining Knowledge of The Usage of Machine LearningInternational Journal of Innovative Science and Research TechnologyAinda não há avaliações
- Collection of Books To Read Preparing For ACM ICPCDocumento1 páginaCollection of Books To Read Preparing For ACM ICPCJia Hong100% (2)
- Fake News Detection On Social Media Using Machine Learning ReportDocumento27 páginasFake News Detection On Social Media Using Machine Learning ReportClassic Printers100% (1)
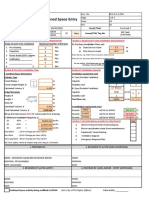
- Ventilation Plan For Confined Space EntryDocumento9 páginasVentilation Plan For Confined Space EntryMohamad Nazmi Mohamad Rafian100% (1)
- Strategic Supply Chain Management The Development of A Diagnostic ModelDocumento277 páginasStrategic Supply Chain Management The Development of A Diagnostic ModelKumar SaurabhAinda não há avaliações
- Comprehensive Social Media Security Analysis & XKeyscore Espionage TechnologyDocumento62 páginasComprehensive Social Media Security Analysis & XKeyscore Espionage TechnologyAI Coordinator - CSC JournalsAinda não há avaliações
- CSI: A Hybrid Deep Model For Fake News Detection: Natali Ruchansky Sungyong Seo Yan LiuDocumento10 páginasCSI: A Hybrid Deep Model For Fake News Detection: Natali Ruchansky Sungyong Seo Yan LiuUcok BunokAinda não há avaliações
- Social Media Misinformation: Definition, Manipulation, and Detection MethodsDocumento11 páginasSocial Media Misinformation: Definition, Manipulation, and Detection Methodsaist.eAinda não há avaliações
- Opening Report Final - 9 - 4 - 2020Documento25 páginasOpening Report Final - 9 - 4 - 2020BENKEMCHI OussamaAinda não há avaliações
- CSI Hybrid Deep Model Detects Fake NewsDocumento11 páginasCSI Hybrid Deep Model Detects Fake Newssony stew rios cahuasAinda não há avaliações
- Metas Adversarial Threat ReportDocumento31 páginasMetas Adversarial Threat ReportAdem AtbaşAinda não há avaliações
- A Normative Approach To Radicalization in Social NetworksDocumento23 páginasA Normative Approach To Radicalization in Social NetworksmenestratosAinda não há avaliações
- When is Society Susceptible to Manipulation? Characterizing Networks Vulnerable to Strategic MisinformationDocumento54 páginasWhen is Society Susceptible to Manipulation? Characterizing Networks Vulnerable to Strategic MisinformationKash BanerjeeAinda não há avaliações
- Open Source Intelligence and Cyber Crime: Social Media AnalyticsNo EverandOpen Source Intelligence and Cyber Crime: Social Media AnalyticsNota: 4 de 5 estrelas4/5 (1212)
- Prevention of Spreading Fake News by Using Two-Point Processes Based Intervention (1)Documento6 páginasPrevention of Spreading Fake News by Using Two-Point Processes Based Intervention (1)Keshav BhumarajuAinda não há avaliações
- Studying Fake News via Network Analysis: Detection and Mitigation ChapterDocumento23 páginasStudying Fake News via Network Analysis: Detection and Mitigation ChapteracassioAinda não há avaliações
- Fake News Early Detection: An Interdisciplinary Study: Xinyi Zhou, Atishay Jain, Vir V. Phoha, and Reza ZafaraniDocumento25 páginasFake News Early Detection: An Interdisciplinary Study: Xinyi Zhou, Atishay Jain, Vir V. Phoha, and Reza ZafaraniSudipa SahaAinda não há avaliações
- Measuring Exposure To Misinformation From Political Elites On TwitterDocumento9 páginasMeasuring Exposure To Misinformation From Political Elites On TwitterJohnny Daniel NogueiraAinda não há avaliações
- Seems Legit An Investigation of The Assessing and Sharing of Unverifiable Messages On Online Social Networks - ISR - 2022Documento25 páginasSeems Legit An Investigation of The Assessing and Sharing of Unverifiable Messages On Online Social Networks - ISR - 2022SarahAinda não há avaliações
- Measuring User Influence in Twitter: The Million Follower FallacyDocumento8 páginasMeasuring User Influence in Twitter: The Million Follower FallacyAlberto D'OttaviAinda não há avaliações
- Unsupervised Fake News Detection On Social Media: A Generative ApproachDocumento8 páginasUnsupervised Fake News Detection On Social Media: A Generative ApproachMuhmmad AhmedAinda não há avaliações
- The Implied Truth EffectDocumento45 páginasThe Implied Truth EffectBeatriz SousaAinda não há avaliações
- Fake News Detection Using Deep LearningDocumento10 páginasFake News Detection Using Deep LearningIJRASETPublicationsAinda não há avaliações
- A Literature Survey On Misinformation Flagging SystemDocumento9 páginasA Literature Survey On Misinformation Flagging SystemIJRASETPublicationsAinda não há avaliações
- 05 Handout 2Documento7 páginas05 Handout 2Kamaong AseroAinda não há avaliações
- Httpsdigital - Uni-Hohenheim - Defileadmineinrichtungendigitallehre V HoDMR3b Gimpel Et Al 2021 - Social Norms Against FakeDocumento26 páginasHttpsdigital - Uni-Hohenheim - Defileadmineinrichtungendigitallehre V HoDMR3b Gimpel Et Al 2021 - Social Norms Against FakeANDREA FERNANDA DEL REAL RAMOSAinda não há avaliações
- NeurIPS 2019 Defending Against Neural Fake News PaperDocumento12 páginasNeurIPS 2019 Defending Against Neural Fake News PaperC VegaAinda não há avaliações
- Limiting The Spread of Misinformation in Social Networks: Ceren Budak Divyakant Agrawal Amr El AbbadiDocumento10 páginasLimiting The Spread of Misinformation in Social Networks: Ceren Budak Divyakant Agrawal Amr El AbbadiSuvam PrasadAinda não há avaliações
- Shimon KoganDocumento52 páginasShimon KoganAndreea DobritaAinda não há avaliações
- Detecting Fake News Using PythonDocumento16 páginasDetecting Fake News Using PythonnishaAinda não há avaliações
- Fake News On Social Media: The (In) Effectiveness of Warning MessagesDocumento18 páginasFake News On Social Media: The (In) Effectiveness of Warning MessagesMing YaoAinda não há avaliações
- Fake News User PDFDocumento6 páginasFake News User PDFScribdAinda não há avaliações
- Fake News Detection Using NLPDocumento9 páginasFake News Detection Using NLPIJRASETPublicationsAinda não há avaliações
- Running Head: Gatekeeping Theory As Applied in Social Domains 1Documento7 páginasRunning Head: Gatekeeping Theory As Applied in Social Domains 1Titus MaiyoAinda não há avaliações
- Tactics of Disinformation - 508Documento10 páginasTactics of Disinformation - 508DavidAinda não há avaliações
- Zhang2019 PDFDocumento17 páginasZhang2019 PDFVatsal PatelAinda não há avaliações
- Knowing Your CustomersDocumento12 páginasKnowing Your CustomersKhawla AtAinda não há avaliações
- A Batch Based Approach For Tweeting Geotags of Social Media AttributesDocumento13 páginasA Batch Based Approach For Tweeting Geotags of Social Media AttributesIJRASETPublicationsAinda não há avaliações
- Tucker 2014Documento18 páginasTucker 2014sophiaw1912Ainda não há avaliações
- Deep Learning For Geolocating Social Media Users and Detecting Fake NewsDocumento12 páginasDeep Learning For Geolocating Social Media Users and Detecting Fake NewsJesús UrbinaAinda não há avaliações
- Sample Research Paper On Government SurveillanceDocumento7 páginasSample Research Paper On Government SurveillancehupqxogkfAinda não há avaliações
- Role of Mobile Social Networks in Information Diffusion: MR - Revanth Guide NameDocumento4 páginasRole of Mobile Social Networks in Information Diffusion: MR - Revanth Guide NameBashadada KhadarAinda não há avaliações
- Social Media Privacy Thesis StatementDocumento4 páginasSocial Media Privacy Thesis Statementlauramillerscottsdale100% (2)
- Fake News and Related ConceptsDocumento3 páginasFake News and Related Conceptsizac jacob tombocAinda não há avaliações
- Everyone's An InfluencerDocumento10 páginasEveryone's An InfluencerLY TAinda não há avaliações
- Mathematics 11 01992 v2Documento21 páginasMathematics 11 01992 v2Mohammed SultanAinda não há avaliações
- Linguistic Markers of Secrets and Sensitive Self-Disclosure in TwitterDocumento10 páginasLinguistic Markers of Secrets and Sensitive Self-Disclosure in TwitterDanielGayoAinda não há avaliações
- Divyanshu Assignment 2Documento7 páginasDivyanshu Assignment 2Jay SoniAinda não há avaliações
- PretestDocumento5 páginasPretestCharles VernaldAinda não há avaliações
- Machine Learning Methods for Fake News Detection Benchmark StudyDocumento14 páginasMachine Learning Methods for Fake News Detection Benchmark StudyTouqeer Ul IslamAinda não há avaliações
- TSC002 HateSpeech TS FNLDocumento11 páginasTSC002 HateSpeech TS FNLNatasha's NaturelandAinda não há avaliações
- Competition Among Memes in A World With Limited Attention: Scientific ReportsDocumento9 páginasCompetition Among Memes in A World With Limited Attention: Scientific ReportsWilliam David Suárez AcostaAinda não há avaliações
- Coordination Patterns Reveal Online Political Astroturfing Across The WorldDocumento10 páginasCoordination Patterns Reveal Online Political Astroturfing Across The Worldpriya sharmaAinda não há avaliações
- SynopsisDocumento8 páginasSynopsisTina ShahAinda não há avaliações
- Social Network Data AnalysisDocumento9 páginasSocial Network Data AnalysisSamuel FonsecaAinda não há avaliações
- The Science of Fake News: One Sentence SummaryDocumento8 páginasThe Science of Fake News: One Sentence SummaryMohamed ChedlyAinda não há avaliações
- Beyond News Contents: The Role of Social Context For Fake News DetectionDocumento9 páginasBeyond News Contents: The Role of Social Context For Fake News DetectionTejas ModiAinda não há avaliações
- "Fake News" Is Not Simply False Information: A Concept Explication and Taxonomy of Online ContentDocumento33 páginas"Fake News" Is Not Simply False Information: A Concept Explication and Taxonomy of Online Contentفاطمة هاشم الأمينAinda não há avaliações
- Fake News Early Detection: A Theory-Driven Model: Xinyi Zhou, Atishay Jain, Vir V. Phoha, and Reza ZafaraniDocumento24 páginasFake News Early Detection: A Theory-Driven Model: Xinyi Zhou, Atishay Jain, Vir V. Phoha, and Reza ZafaraniHieu NguyenAinda não há avaliações
- Computers in Human Behavior: Emma J. Williams, Amy Beardmore, Adam N. JoinsonDocumento10 páginasComputers in Human Behavior: Emma J. Williams, Amy Beardmore, Adam N. JoinsonSean R BnAinda não há avaliações
- Abstract - : 1.1 Network Evolution ModelsDocumento6 páginasAbstract - : 1.1 Network Evolution ModelsijcsnAinda não há avaliações
- Technological Forecasting & Social ChangeDocumento17 páginasTechnological Forecasting & Social ChangeKumar SaurabhAinda não há avaliações
- Sciencedirect: Indoor Environment Quality (User Comfort, Health and Behaviour)Documento6 páginasSciencedirect: Indoor Environment Quality (User Comfort, Health and Behaviour)Kumar SaurabhAinda não há avaliações
- Critical Perspectives On Accounting: Pauline Gleadle, Stuart Parris, Alan Shipman, Roberto SimonettiDocumento11 páginasCritical Perspectives On Accounting: Pauline Gleadle, Stuart Parris, Alan Shipman, Roberto SimonettiKumar SaurabhAinda não há avaliações
- Final Project: Tabasco 7-Spice Chili Recipe Case Study MKTG - 1030 - F16Documento9 páginasFinal Project: Tabasco 7-Spice Chili Recipe Case Study MKTG - 1030 - F16Kumar SaurabhAinda não há avaliações
- (Philosophy and Medicine 94) Mark J. Cherry, Ana Smith Iltis (Auth.), Mark J. Cherry, Ana Smith Iltis (Eds.) - Pluralistic Casuistry_ Moral Arguments, Economic Realities, And Political Theory-SpringerDocumento260 páginas(Philosophy and Medicine 94) Mark J. Cherry, Ana Smith Iltis (Auth.), Mark J. Cherry, Ana Smith Iltis (Eds.) - Pluralistic Casuistry_ Moral Arguments, Economic Realities, And Political Theory-SpringerKumar SaurabhAinda não há avaliações
- Czako VeronikaDocumento371 páginasCzako VeronikaKumar SaurabhAinda não há avaliações
- Business Visa ChecklistDocumento1 páginaBusiness Visa ChecklistKumar SaurabhAinda não há avaliações
- JJ Kavanagh DiscountsDocumento1 páginaJJ Kavanagh DiscountsKumar SaurabhAinda não há avaliações
- Dublinbikes Station Map 2017Documento1 páginaDublinbikes Station Map 2017Kumar SaurabhAinda não há avaliações
- 1 s2.0 S2211883719300206 MainDocumento2 páginas1 s2.0 S2211883719300206 MainKumar SaurabhAinda não há avaliações
- P 201707121200202017EMNIllegalEmploymentStudy Online 04.07.17Documento67 páginasP 201707121200202017EMNIllegalEmploymentStudy Online 04.07.17Kumar SaurabhAinda não há avaliações
- Semmler Et Al-2010-International Journal of ClimatologyDocumento10 páginasSemmler Et Al-2010-International Journal of ClimatologyKumar SaurabhAinda não há avaliações
- Toyota Production SystemDocumento1 páginaToyota Production SystemKumar SaurabhAinda não há avaliações
- KPMG Guide To SEZ in Poland 2009Documento68 páginasKPMG Guide To SEZ in Poland 2009GNAFOOAinda não há avaliações
- A Critical Study On Operations Managemen PDFDocumento38 páginasA Critical Study On Operations Managemen PDFAAYUSH MALHOTRAAinda não há avaliações
- Biopharmaceutical Pipeline Full ReportDocumento36 páginasBiopharmaceutical Pipeline Full ReportKumar SaurabhAinda não há avaliações
- Lean Manufacturing in MalaysiaDocumento7 páginasLean Manufacturing in MalaysiaSherazi MujtabaAinda não há avaliações
- What Is Social Capital?: by Yevoon 08533970 Otto 08532389Documento22 páginasWhat Is Social Capital?: by Yevoon 08533970 Otto 08532389Kumar SaurabhAinda não há avaliações
- Investment in Poland 2013Documento150 páginasInvestment in Poland 2013Kumar SaurabhAinda não há avaliações
- FDR CallersDocumento2 páginasFDR CallersKumar SaurabhAinda não há avaliações
- Ticket Vending Machines - PortugalDocumento9 páginasTicket Vending Machines - Portugalan_outsiderAinda não há avaliações
- Critical Perspectives On Accounting: Pauline Gleadle, Stuart Parris, Alan Shipman, Roberto SimonettiDocumento11 páginasCritical Perspectives On Accounting: Pauline Gleadle, Stuart Parris, Alan Shipman, Roberto SimonettiKumar SaurabhAinda não há avaliações
- National Diabetes Registry Report Vol 1 2009 2012 PDFDocumento54 páginasNational Diabetes Registry Report Vol 1 2009 2012 PDFkhairul azlanAinda não há avaliações
- Financial Management Formula TableDocumento5 páginasFinancial Management Formula TableKumar SaurabhAinda não há avaliações
- IFPMA Facts and Figures 2017Documento86 páginasIFPMA Facts and Figures 2017Destria Indah SariAinda não há avaliações
- Technological Forecasting & Social ChangeDocumento17 páginasTechnological Forecasting & Social ChangeKumar SaurabhAinda não há avaliações
- Symposium S4Documento8 páginasSymposium S4huykhiemAinda não há avaliações
- Bourdieu 1986-The Forms of CapitalDocumento19 páginasBourdieu 1986-The Forms of CapitalKumar SaurabhAinda não há avaliações
- 5.2 Flanged Bolt CouplingDocumento11 páginas5.2 Flanged Bolt CouplingShayneBumatay0% (1)
- Stress Amongst Healthcare Professionals and Migrant Workers During Covid-19 PandemicDocumento6 páginasStress Amongst Healthcare Professionals and Migrant Workers During Covid-19 PandemicIJAR JOURNALAinda não há avaliações
- Practical File Class XDocumento5 páginasPractical File Class XJaiAinda não há avaliações
- Decision Tree Classifier On Private DataDocumento8 páginasDecision Tree Classifier On Private DataBianca RodriguesAinda não há avaliações
- Qc-Sop-0 - Drilling of PoleDocumento7 páginasQc-Sop-0 - Drilling of PoleAmeerHamzaWarraichAinda não há avaliações
- Memory Slim CBLT PDFDocumento4 páginasMemory Slim CBLT PDFMichell ben ManikAinda não há avaliações
- International Financial Management 7th Edition Eun Test BankDocumento25 páginasInternational Financial Management 7th Edition Eun Test BankMatthewRosarioksdf100% (58)
- A.3s Scheme Used in Managing Epp ClassDocumento35 páginasA.3s Scheme Used in Managing Epp Classpixie02100% (2)
- Area Manager ChecklistDocumento7 páginasArea Manager ChecklistUtkarsh RaiAinda não há avaliações
- LD Lab ManualDocumento92 páginasLD Lab ManualSunil BegumpurAinda não há avaliações
- Wheel Radial Fatigue Test MachineDocumento1 páginaWheel Radial Fatigue Test MachineAlex NuñezAinda não há avaliações
- What Is Creole Language - Definition & PhrasesDocumento2 páginasWhat Is Creole Language - Definition & PhrasesGabriel7496Ainda não há avaliações
- Matlab 8Documento6 páginasMatlab 8Robert RoigAinda não há avaliações
- Sae Technical Paper Series 2015-36-0353: Static and Dynamic Analysis of A Chassis of A Prototype CarDocumento12 páginasSae Technical Paper Series 2015-36-0353: Static and Dynamic Analysis of A Chassis of A Prototype CarGanesh KCAinda não há avaliações
- Logisitim CircuitDocumento7 páginasLogisitim CircuitDragos ManoleaAinda não há avaliações
- Bruxaria e Historia Cultural PDFDocumento25 páginasBruxaria e Historia Cultural PDFGeorge Henri FernandoAinda não há avaliações
- 8279Documento32 páginas8279Kavitha SubramaniamAinda não há avaliações
- Formulation and Evaluation of Lansoprazole Delayed Release PelletsDocumento20 páginasFormulation and Evaluation of Lansoprazole Delayed Release PelletsUmair MazharAinda não há avaliações
- RDSCM HowTo GuideDocumento17 páginasRDSCM HowTo GuideEric LandryAinda não há avaliações
- Trade ReportDocumento6 páginasTrade ReportIKEOKOLIE HOMEPCAinda não há avaliações
- Tutorial Quartus II Simulation VHDLDocumento27 páginasTutorial Quartus II Simulation VHDLHeitor B. S. BezerraAinda não há avaliações
- ISO 9000 Audit Checklist for Quality Management SystemsDocumento28 páginasISO 9000 Audit Checklist for Quality Management SystemsphilipalexjonesAinda não há avaliações
- ĐỀ CƯƠNG ÔN TẬP HỌC KÌ 1-LỚP 12Documento15 páginasĐỀ CƯƠNG ÔN TẬP HỌC KÌ 1-LỚP 12Anh Duc VuAinda não há avaliações
- Ake Products 001 2016Documento171 páginasAke Products 001 2016davidAinda não há avaliações