Você também pode gostar
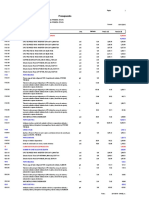
- Presupuesto SISTEMA DE AIRE ACONDICIONADODocumento2 páginasPresupuesto SISTEMA DE AIRE ACONDICIONADOBIlly D. Santoyo100% (1)
- Motores eléctricos: problemas resueltos de CC con excitación serie y derivaciónDocumento21 páginasMotores eléctricos: problemas resueltos de CC con excitación serie y derivaciónMarco Martinez SantiagoAinda não há avaliações
- Diseño de Canales de RiegoDocumento31 páginasDiseño de Canales de RiegoFabio JuradoAinda não há avaliações
- Agujeros y contenido de la base del cráneoDocumento9 páginasAgujeros y contenido de la base del cráneoLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- Agujeros y contenido de la base del cráneoDocumento9 páginasAgujeros y contenido de la base del cráneoLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- Métodos Matemáticos para Sistemas LinealesDocumento15 páginasMétodos Matemáticos para Sistemas LinealesLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- Agujeros y Estructuras Del CraneoDocumento1 páginaAgujeros y Estructuras Del CraneoLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- Modelo OsiDocumento3 páginasModelo OsiLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- Simulacion SimnonDocumento6 páginasSimulacion SimnonLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- Mino GuiaDocumento4 páginasMino GuiaLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- Tarea 15 AgDocumento1 páginaTarea 15 AgLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- Métodos Matemáticos para Sistemas LinealesDocumento11 páginasMétodos Matemáticos para Sistemas LinealesLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- Tarea 5Documento2 páginasTarea 5Ladhy Guadalupe Feliciano FuentesAinda não há avaliações
- Filt RossDocumento8 páginasFilt RossLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- Funciones Administrativas Básicas de Un GerenteDocumento4 páginasFunciones Administrativas Básicas de Un GerenteLadhy Guadalupe Feliciano Fuentes100% (1)
- Ejercicio1 - VibDocumento2 páginasEjercicio1 - VibLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- No Cabe Duda Que Estados Unidos Sigue Siendo La Cuna de Las Empresas Tecnológicas Seguida Por El Gigante AsiáticoDocumento2 páginasNo Cabe Duda Que Estados Unidos Sigue Siendo La Cuna de Las Empresas Tecnológicas Seguida Por El Gigante AsiáticoLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- TORNEO CNC PRÁCTICADocumento14 páginasTORNEO CNC PRÁCTICALadhy Guadalupe Feliciano FuentesAinda não há avaliações
- PresentaciónledDocumento11 páginasPresentaciónledLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- Simulacion SimnonDocumento6 páginasSimulacion SimnonLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- Seguridad LeyesDocumento30 páginasSeguridad LeyesLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- En Que Consistio La Revolucion CubanaDocumento2 páginasEn Que Consistio La Revolucion CubanaLadhy Guadalupe Feliciano Fuentes100% (1)
- Practica Sensor de Presion MPX2200Documento3 páginasPractica Sensor de Presion MPX2200Ladhy Guadalupe Feliciano Fuentes100% (1)
- Instructivo R FlamDocumento4 páginasInstructivo R FlamLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- VinoDocumento4 páginasVinoLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- Fallas Eléctricas en Un CircuitoDocumento11 páginasFallas Eléctricas en Un CircuitoLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- Sensor NTC: funcionamiento y aplicacionesDocumento15 páginasSensor NTC: funcionamiento y aplicacionesLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- IeeeDocumento4 páginasIeeeSteven SterlingAinda não há avaliações
- Luces LedDocumento12 páginasLuces LedLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- Diagrama Degantt.Documento6 páginasDiagrama Degantt.Ladhy Guadalupe Feliciano FuentesAinda não há avaliações
- 2b. Entrevista SemiestrucuradaDocumento1 página2b. Entrevista SemiestrucuradaLadhy Guadalupe Feliciano FuentesAinda não há avaliações
- Catalogo 2010Documento52 páginasCatalogo 2010kc_9903Ainda não há avaliações
- Analisis DE PRECIOS UNIT PDFDocumento8 páginasAnalisis DE PRECIOS UNIT PDFAlberto EsquivelAinda não há avaliações
- 1 - Ecuaciones Capacidad de Carga PDFDocumento4 páginas1 - Ecuaciones Capacidad de Carga PDFNicolas Quintero QuinteroAinda não há avaliações
- Catalogo Omega 2017Documento44 páginasCatalogo Omega 2017mbelenyuAinda não há avaliações
- Plano Unifilar NEMOCONDocumento21 páginasPlano Unifilar NEMOCONthejf321Ainda não há avaliações
- Ficha Técnica APRODocumento1 páginaFicha Técnica APROAnonymous rfBGStI6Ainda não há avaliações
- A Clase 1 Semana 1 CimentacionesDocumento34 páginasA Clase 1 Semana 1 CimentacionesLeidy Ocaña GuerreroAinda não há avaliações
- Ip QoSDocumento5 páginasIp QoSalexanderAinda não há avaliações
- DANZADocumento3 páginasDANZAMetztli OlivaAinda não há avaliações
- 0 Ficha de Evaluación de Requerimientos de Mobiliario y Equipamiento - v3Documento2 páginas0 Ficha de Evaluación de Requerimientos de Mobiliario y Equipamiento - v3SebastianOrtizMattaAinda não há avaliações
- Basset - Recalces ProfundosDocumento10 páginasBasset - Recalces Profundosjavi flowAinda não há avaliações
- DataLog S71200Documento4 páginasDataLog S71200Luis Fernando CuaspudAinda não há avaliações
- Tecnicas de Escaneo MasivoDocumento56 páginasTecnicas de Escaneo MasivoDiacono10Ainda não há avaliações
- Contrato ObraDocumento3 páginasContrato ObraRenzoBordaBustamanteAinda não há avaliações
- MODULO 02 ArquitecturaDocumento1 páginaMODULO 02 ArquitecturaJoel FabianAinda não há avaliações
- Diseño de losas, cimentaciones, escaleras y estructuras sísmicas en Concreto Armado IIDocumento5 páginasDiseño de losas, cimentaciones, escaleras y estructuras sísmicas en Concreto Armado IIepocli2016Ainda não há avaliações
- Escenarios de Ataques A Redes de InformacionDocumento17 páginasEscenarios de Ataques A Redes de InformacionMario Bautista100% (1)
- Contra FuertesDocumento6 páginasContra FuertesgroverAinda não há avaliações
- Calculo de Seccion de ConductoresDocumento51 páginasCalculo de Seccion de ConductoresFrank Edisson Cardenas LimayllaAinda não há avaliações
- Puentes Modernos de Sevilla - PROYECTO INTEGRADODocumento12 páginasPuentes Modernos de Sevilla - PROYECTO INTEGRADOPablo Fernandez De Cordova TerryAinda não há avaliações
- Antoni Gaudí. Antología - Pau BudíDocumento18 páginasAntoni Gaudí. Antología - Pau BudíPau Budí100% (1)
- Parque de ChapultepecDocumento19 páginasParque de ChapultepecEstefany Najejda Alvarez DelgadoAinda não há avaliações
- Instalacion de Tuberias Pruebas y Ensayos GasDocumento37 páginasInstalacion de Tuberias Pruebas y Ensayos GasAntonio Ruiz EscuderoAinda não há avaliações
- Cotizacion ThelceDocumento1 páginaCotizacion ThelcejonathanAinda não há avaliações
- InternetDocumento22 páginasInternetapi-26277412100% (1)
- Fórmula polinómica agrupamiento preliminar recuperación servicio transitabilidad camino vecinalDocumento2 páginasFórmula polinómica agrupamiento preliminar recuperación servicio transitabilidad camino vecinalJamesCarranzaAinda não há avaliações