Você também pode gostar
- Sistema de Coordenadas GeograficasDocumento9 páginasSistema de Coordenadas GeograficasRonal Ivàn Ramos VàsquezAinda não há avaliações
- Análisis de Los Factores Que Afectan El Mercado Del PetróleoDocumento11 páginasAnálisis de Los Factores Que Afectan El Mercado Del PetróleoRonal Ivàn Ramos VàsquezAinda não há avaliações
- Trabajo EstadisticaDocumento31 páginasTrabajo EstadisticaRonal Ivàn Ramos VàsquezAinda não há avaliações
- Plan de Recursos HumanosDocumento14 páginasPlan de Recursos HumanosAlexamder Mejia RojasAinda não há avaliações
- Ingenieria de Software-Somerville-Capitulo 1Documento6 páginasIngenieria de Software-Somerville-Capitulo 1Ronal Ivàn Ramos VàsquezAinda não há avaliações
- EmpowermentDocumento19 páginasEmpowermentRonal Ivàn Ramos VàsquezAinda não há avaliações
- Plan de Proceso de CoachingDocumento3 páginasPlan de Proceso de CoachingRonal Ivàn Ramos VàsquezAinda não há avaliações
- Sistemas OperativosDocumento19 páginasSistemas OperativosRonal Ivàn Ramos VàsquezAinda não há avaliações
- T5.Arquitectura Del ComputadorDocumento5 páginasT5.Arquitectura Del ComputadorRonal Ivàn Ramos VàsquezAinda não há avaliações
- Conceptos Básicos Relacionados Con La TraducciónDocumento3 páginasConceptos Básicos Relacionados Con La TraducciónRonal Ivàn Ramos VàsquezAinda não há avaliações
- CompetenciasDocumento18 páginasCompetenciasRonal Ivàn Ramos VàsquezAinda não há avaliações
- Proceso de Capatacion Web Sistemas de InformacionDocumento5 páginasProceso de Capatacion Web Sistemas de InformacionRonal Ivàn Ramos VàsquezAinda não há avaliações
- Informe Funciones de Sistema en SQL ServerDocumento33 páginasInforme Funciones de Sistema en SQL ServerRonal Ivàn Ramos Vàsquez100% (1)
- CoachingDocumento28 páginasCoachingElvis Anthony Azañero ChavezAinda não há avaliações
- ArquitecturaDocumento32 páginasArquitecturaRonal Ivàn Ramos VàsquezAinda não há avaliações
- Clase03 SistInformacAmalia2015 Cadena ValorDocumento23 páginasClase03 SistInformacAmalia2015 Cadena ValorrolandoAinda não há avaliações
- Cadena de Valor 1 PDFDocumento16 páginasCadena de Valor 1 PDFDiana Guisseth Bolaños MahechaAinda não há avaliações
- 1Documento18 páginas1Ronal Ivàn Ramos VàsquezAinda não há avaliações
- Cadena de ValorDocumento10 páginasCadena de ValorRonal Ivàn Ramos VàsquezAinda não há avaliações
- Logística y procesos de Gloria S.A. para la elaboración y distribución de leche evaporadaDocumento8 páginasLogística y procesos de Gloria S.A. para la elaboración y distribución de leche evaporadaRonal Ivàn Ramos Vàsquez100% (1)
- Universidad Nacional de CajamarcaDocumento8 páginasUniversidad Nacional de CajamarcaRonal Ivàn Ramos VàsquezAinda não há avaliações
- Cadena Valor Coca ColaDocumento6 páginasCadena Valor Coca ColaKarina Soriano100% (1)
- Practica N 3 4y 5Documento20 páginasPractica N 3 4y 5Espinoza Pereyra WenerAinda não há avaliações
- Fundamentos de Economía - Irvin B. Tucker (3ra Edición)Documento560 páginasFundamentos de Economía - Irvin B. Tucker (3ra Edición)Jesús Manuel Losada Zambrano84% (31)
- Análisis Del Código de Ética Del CipDocumento2 páginasAnálisis Del Código de Ética Del CipLuis Agustin Suaña Jala100% (8)
- La Meta - ResumenDocumento23 páginasLa Meta - ResumenAlex Pro SkaAinda não há avaliações
- Ordenamiento Por MontículosDocumento13 páginasOrdenamiento Por MontículosRonal Ivàn Ramos VàsquezAinda não há avaliações
- The MetaDocumento19 páginasThe MetaLeonardo MamaniAinda não há avaliações
- Guia de Ecologia, 2016Documento42 páginasGuia de Ecologia, 2016Jesus SiesquenAinda não há avaliações
- Ficha Tecnica de La Encuesta y MuestraDocumento4 páginasFicha Tecnica de La Encuesta y MuestraNatalia GonzálezAinda não há avaliações
- 8.operaciones Booleanas Union Restar Interseccion Extruir Cara Cortar Alinear 3d M PDFDocumento7 páginas8.operaciones Booleanas Union Restar Interseccion Extruir Cara Cortar Alinear 3d M PDFjairoluiskiwiAinda não há avaliações
- Cuestionario, InformaticaDocumento12 páginasCuestionario, InformaticaANNA PAULINAAinda não há avaliações
- Factura OrangeDocumento8 páginasFactura OrangeOfertas Telcom100% (1)
- Funciones de Entrada y Salida Digitales y Analógicas en Ide ArduinoDocumento5 páginasFunciones de Entrada y Salida Digitales y Analógicas en Ide ArduinoLeon GuamanAinda não há avaliações
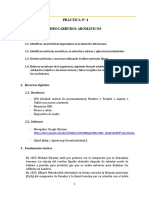
- Práctica #4 - Hidrocarburos AromáticosDocumento13 páginasPráctica #4 - Hidrocarburos AromáticossoledadAinda não há avaliações
- Syllabus Admin Sistemas OpDocumento6 páginasSyllabus Admin Sistemas OpJhosua Fuertes MelendezAinda não há avaliações
- Cocodrile 3º EsoDocumento12 páginasCocodrile 3º EsoAntoniaAinda não há avaliações
- Estrategias de Seguimiento Al ClienteDocumento1 páginaEstrategias de Seguimiento Al Clientecremas2006Ainda não há avaliações
- Dispositivos Clase3Documento30 páginasDispositivos Clase3Lucy Perez LopezAinda não há avaliações
- Gestion Del Talento Humano Por CompetenciasDocumento8 páginasGestion Del Talento Humano Por CompetenciasSirleyOspinaAinda não há avaliações
- MANUAL MoodleDocumento10 páginasMANUAL MoodlePriscila Ivonne Barrios Hernandez100% (1)
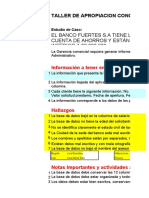
- Presentación Clientes Banco Fuerte SaDocumento36 páginasPresentación Clientes Banco Fuerte Sageraldine forero fuqueneAinda não há avaliações
- Análisis de pruebas de decremento de presiónDocumento34 páginasAnálisis de pruebas de decremento de presiónRicardo Hernández VelázquezAinda não há avaliações
- PortabilidadDocumento1 páginaPortabilidadgustavoAinda não há avaliações
- Instrumento Fany Santisteban Gomez para Sabana de DatosDocumento7 páginasInstrumento Fany Santisteban Gomez para Sabana de Datosjulio vegaAinda não há avaliações
- Tarea 01Documento9 páginasTarea 01Manuel Cervera100% (1)
- Kit de Politicas para New HiresDocumento22 páginasKit de Politicas para New HiresLupita LaraAinda não há avaliações
- Repositos DigitalesDocumento19 páginasRepositos Digitalesfrederick cubaAinda não há avaliações
- MovimientosDocumento6 páginasMovimientosDavid ParedesAinda não há avaliações
- NormalizacionDocumento7 páginasNormalizacionJuan Calzia CamposAinda não há avaliações
- Formulario - de - Registro - de - Materias - 2019 IST LOJADocumento2 páginasFormulario - de - Registro - de - Materias - 2019 IST LOJARony CalderonAinda não há avaliações
- Robótica: cuerpo y alma avanzanDocumento6 páginasRobótica: cuerpo y alma avanzanJOSE ALEXANDER REVOLLO MITAAinda não há avaliações
- EasyVista 2008 Brochure SP v2Documento16 páginasEasyVista 2008 Brochure SP v2Joaquin BarreiroAinda não há avaliações
- Resumen de Visual Basic para Examen 1er ParcialDocumento160 páginasResumen de Visual Basic para Examen 1er ParcialJorge España AlarcónAinda não há avaliações
- La investigación sobre los suicidios en TecnocentroDocumento6 páginasLa investigación sobre los suicidios en TecnocentroJavier Herbert Abarca LeonardoAinda não há avaliações
- Ejercicios Del Capítulo VIIDocumento2 páginasEjercicios Del Capítulo VIIalonso vargasAinda não há avaliações
- Transistor MOSFET Caracterización y Aplicaciones Básicas.Documento7 páginasTransistor MOSFET Caracterización y Aplicaciones Básicas.saor117100% (1)
- Función AcadémicaDocumento7 páginasFunción AcadémicaMayra GerdelAinda não há avaliações
- 2.1 Formas de Usar La Mercadotecnia Integral Como Soporte Canal de Ventas: CRM Y Potencializar Venta CruzadaDocumento2 páginas2.1 Formas de Usar La Mercadotecnia Integral Como Soporte Canal de Ventas: CRM Y Potencializar Venta CruzadaLUCY FLORES SANTOSAinda não há avaliações