Você também pode gostar
- 1091 Circuit Theory HW1 Solution: Tera T Giga G (Femto FDocumento5 páginas1091 Circuit Theory HW1 Solution: Tera T Giga G (Femto F曾燒餅Ainda não há avaliações
- Bottoms y Sparks - Legitimacy - and - Imprisonment - Revisited PDFDocumento29 páginasBottoms y Sparks - Legitimacy - and - Imprisonment - Revisited PDFrossana gaunaAinda não há avaliações
- Class Program 2019 2020Documento2 páginasClass Program 2019 2020Cristy Gongon100% (5)
- Delta Robot KinematicsDocumento11 páginasDelta Robot KinematicssekinAinda não há avaliações
- Industrial Control: Assignment IIDocumento12 páginasIndustrial Control: Assignment IIOMAR ALEJANDRO LONGORIA VAZQUEZAinda não há avaliações
- Matlab Simulink DC MotorDocumento12 páginasMatlab Simulink DC Motorkillua142100% (4)
- EEET2109 MST 2014 Answers PDFDocumento4 páginasEEET2109 MST 2014 Answers PDFCollin lcwAinda não há avaliações
- Et M Zulassungspruefung PDFDocumento5 páginasEt M Zulassungspruefung PDFmuhammad bilalAinda não há avaliações
- Position LabDocumento15 páginasPosition LabchrisAinda não há avaliações
- Signals and Systems (Practice Questions - Laplace Transform)Documento26 páginasSignals and Systems (Practice Questions - Laplace Transform)madivala nagaraja0% (1)
- Velocity Lab ReportDocumento15 páginasVelocity Lab ReportchrisAinda não há avaliações
- Nabil 201 Chap 06Documento37 páginasNabil 201 Chap 06Maximus AranhaAinda não há avaliações
- ME 380 Chapter 2 HW Solution: Review QuestionsDocumento5 páginasME 380 Chapter 2 HW Solution: Review QuestionsVisakan ParameswaranAinda não há avaliações
- Mathematical ModelDocumento18 páginasMathematical Modelardius ebenezerAinda não há avaliações
- The Transfer Function PDFDocumento15 páginasThe Transfer Function PDFArnav KushwahaAinda não há avaliações
- Control Systems Theory: Transfer Function of Physical Systems STB 35103Documento108 páginasControl Systems Theory: Transfer Function of Physical Systems STB 35103Akula Veerraju100% (1)
- E F G E G: Visit Us At: WWW - Nodia.co - inDocumento3 páginasE F G E G: Visit Us At: WWW - Nodia.co - inUnique CreationAinda não há avaliações
- 7 Fungsi TransferDocumento13 páginas7 Fungsi TransferQoryAinda não há avaliações
- CH 02Documento42 páginasCH 02Whats UPAinda não há avaliações
- Natural and Step Responses For RLC Circuits: A D X DT DX DTDocumento2 páginasNatural and Step Responses For RLC Circuits: A D X DT DX DTfarazhumayunAinda não há avaliações
- Control Systems Theory: Transfer Function of Physical SystemsDocumento108 páginasControl Systems Theory: Transfer Function of Physical SystemsMelanieAinda não há avaliações
- Control PDFDocumento26 páginasControl PDFFlat MateAinda não há avaliações
- Control Systems: GATE Objective & Numerical Type SolutionsDocumento26 páginasControl Systems: GATE Objective & Numerical Type SolutionsFlat Mate67% (3)
- Ee 2008Documento47 páginasEe 2008Aditya Sankar SenguptaAinda não há avaliações
- Electrical Network Transfer FunctionDocumento21 páginasElectrical Network Transfer FunctionRyan Arce100% (2)
- ControlDocumento55 páginasControlHuyThaiAinda não há avaliações
- ProblemsDocumento5 páginasProblemsAhasan RidoyAinda não há avaliações
- 13 Electric Motors 101Documento60 páginas13 Electric Motors 101Sairam A J 18MAC0002Ainda não há avaliações
- Control Schemes For DC-DC Converter Stages For PV/Battery Based Autonomous SystemDocumento4 páginasControl Schemes For DC-DC Converter Stages For PV/Battery Based Autonomous SystemBojan BankovicAinda não há avaliações
- Chapter 4 - Control System ModellingDocumento65 páginasChapter 4 - Control System Modellingvenosyah devanAinda não há avaliações
- Ec 2003Documento37 páginasEc 2003SRINIVASA RAOAinda não há avaliações
- Automatic Control CH2Documento52 páginasAutomatic Control CH2廖偉丞Ainda não há avaliações
- Transfer FunctionDocumento40 páginasTransfer FunctionLai Yon Peng67% (3)
- CT203: Signals & Systems Tutorial 13 - Laplace Transform and SamplingDocumento2 páginasCT203: Signals & Systems Tutorial 13 - Laplace Transform and SamplingKiruba KAinda não há avaliações
- Boundary Value ProblemsDocumento15 páginasBoundary Value ProblemsShadman Saqlain Rahman, 170021057Ainda não há avaliações
- Chapter 3 Part IDocumento68 páginasChapter 3 Part IDaniel MengeshaAinda não há avaliações
- Lecture 02 Electrical Networks Transfer FunctionDocumento18 páginasLecture 02 Electrical Networks Transfer FunctionRammay SbAinda não há avaliações
- Electronics Sample Paper 5Documento12 páginasElectronics Sample Paper 5gunasekaran kAinda não há avaliações
- Solutions To Paper - 3 Physics: 1 V V I 2 R R / 2 3R V I 2RDocumento11 páginasSolutions To Paper - 3 Physics: 1 V V I 2 R R / 2 3R V I 2Rabid azizAinda não há avaliações
- Application of Linear Transformation in Computer Graphics PDFDocumento103 páginasApplication of Linear Transformation in Computer Graphics PDFShivam AhujaAinda não há avaliações
- E343 F20 Lecture 2 Modeling SlidesDocumento32 páginasE343 F20 Lecture 2 Modeling SlidesMOHAMMED ALI MOHAMMED ZABBANIAinda não há avaliações
- SIGNALS & SYSTEMS Objective Questions PDFDocumento21 páginasSIGNALS & SYSTEMS Objective Questions PDFMukesh Sharma100% (2)
- 《اسئلة الجابتر 16 مصدرالكسندر شبكات 》Documento8 páginas《اسئلة الجابتر 16 مصدرالكسندر شبكات 》d57m27w6q4Ainda não há avaliações
- Control System ModelingDocumento88 páginasControl System Modelingcantik cuteAinda não há avaliações
- Series Elastic ActuatorDocumento5 páginasSeries Elastic Actuatoraliza younisAinda não há avaliações
- Lecture 02 Electrical Networks Transfer FunctionDocumento18 páginasLecture 02 Electrical Networks Transfer FunctionMuhammad Hassan JavedAinda não há avaliações
- Lecture 02 Electrical Networks Transfer FunctionDocumento18 páginasLecture 02 Electrical Networks Transfer FunctionAhmad RazaAinda não há avaliações
- Chapter 09Documento52 páginasChapter 09gudxor85741031Ainda não há avaliações
- GATE-Electronics & Comm (ECE) - 2009Documento21 páginasGATE-Electronics & Comm (ECE) - 2009Rajendra PrasadAinda não há avaliações
- Chapter2 Part C ModifiedDocumento36 páginasChapter2 Part C Modifiedabed salemAinda não há avaliações
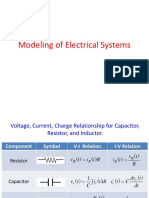
- Modeling of Electrical SystemsDocumento51 páginasModeling of Electrical SystemsCheems PandeyAinda não há avaliações
- Mid SampleDocumento8 páginasMid SampleZahin Tazwar 1921486642Ainda não há avaliações
- Q.1 To Q.25 Carry One Mark EachDocumento13 páginasQ.1 To Q.25 Carry One Mark EachbaluAinda não há avaliações
- R. W. EricksonDocumento51 páginasR. W. EricksonVanshika JindalAinda não há avaliações
- Lec 05Documento14 páginasLec 05Adit 0110Ainda não há avaliações
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Ainda não há avaliações
- Transmutation and Operator Differential EquationsNo EverandTransmutation and Operator Differential EquationsAinda não há avaliações
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesNo EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesNota: 1.5 de 5 estrelas1.5/5 (2)
- Tables of Weber Functions: Mathematical Tables, Vol. 1No EverandTables of Weber Functions: Mathematical Tables, Vol. 1Ainda não há avaliações
- On the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)No EverandOn the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)Ainda não há avaliações
- Tables of Lommel's Functions of Two Pure Imaginary Variables: Mathematical Tables SeriesNo EverandTables of Lommel's Functions of Two Pure Imaginary Variables: Mathematical Tables SeriesAinda não há avaliações
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Ainda não há avaliações
- Brochureof Math Olympiad 2018Documento8 páginasBrochureof Math Olympiad 2018RajalaxmiAinda não há avaliações
- Present Value AnnuityDocumento16 páginasPresent Value AnnuityRajalaxmiAinda não há avaliações
- Math CurriculumDocumento2 páginasMath CurriculumRajalaxmiAinda não há avaliações
- Bmb12e PPT 4 6Documento18 páginasBmb12e PPT 4 6RajalaxmiAinda não há avaliações
- Maths PDFDocumento8 páginasMaths PDFRajalaxmiAinda não há avaliações
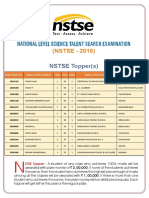
- NSTSE Toppers 2018 PDFDocumento1 páginaNSTSE Toppers 2018 PDFRajalaxmi0% (1)
- MATH 2040 Test 1 CH 2 - 3 - Fall 2019Documento7 páginasMATH 2040 Test 1 CH 2 - 3 - Fall 2019RajalaxmiAinda não há avaliações
- ZGBBDBZDocumento30 páginasZGBBDBZRajalaxmiAinda não há avaliações
- Prejudicial QuestionDocumento1 páginaPrejudicial QuestionlmafAinda não há avaliações
- Macguffin: History and UseDocumento5 páginasMacguffin: History and UseGeraldo CostaAinda não há avaliações
- Labor Law Review Questions and AnswersDocumento151 páginasLabor Law Review Questions and AnswersCarty MarianoAinda não há avaliações
- Notification On Deemed Examination Result NoticeDocumento2 páginasNotification On Deemed Examination Result Noticesteelage11Ainda não há avaliações
- Muslimah's Handbook of PurityDocumento60 páginasMuslimah's Handbook of PurityMuadh KhanAinda não há avaliações
- Noli Me Tangere CharactersDocumento4 páginasNoli Me Tangere CharactersDiemAinda não há avaliações
- Meralco v. CastilloDocumento2 páginasMeralco v. CastilloJoven CamusAinda não há avaliações
- Attitudes and Attitude ChangeDocumento19 páginasAttitudes and Attitude Changeprajwal-athrey-3069Ainda não há avaliações
- 03 Network TOPCIT PDFDocumento80 páginas03 Network TOPCIT PDFJayson AguilarAinda não há avaliações
- Draft Cavite MutinyDocumento1 páginaDraft Cavite MutinyaminoacidAinda não há avaliações
- Cranial Deformity in The Pueblo AreaDocumento3 páginasCranial Deformity in The Pueblo AreaSlavica JovanovicAinda não há avaliações
- Skills For Developing Yourself As A LeaderDocumento26 páginasSkills For Developing Yourself As A LeaderhIgh QuaLIty SVTAinda não há avaliações
- DocumentDocumento4 páginasDocumentJuliana ZamorasAinda não há avaliações
- الاستراتيجية الامنية الأمريكيةDocumento141 páginasالاستراتيجية الامنية الأمريكيةAhmedZEMMITAinda não há avaliações
- Average and Instantaneous AccelerationDocumento35 páginasAverage and Instantaneous AccelerationaraneyaAinda não há avaliações
- DLL - English 4 - Q2 - W8Documento4 páginasDLL - English 4 - Q2 - W8BenjAinda não há avaliações
- Current Technique in The Audiologic Evaluation of Infants: Todd B. Sauter, M.A., CCC-ADocumento35 páginasCurrent Technique in The Audiologic Evaluation of Infants: Todd B. Sauter, M.A., CCC-AGoesti YudistiraAinda não há avaliações
- CO - Config Sap Top JobsDocumento81 páginasCO - Config Sap Top JobsAditya PakalaAinda não há avaliações
- Ujt and PutDocumento35 páginasUjt and Putisraeljumbo100% (1)
- Bible Study OutlineDocumento2 páginasBible Study OutlineAnonymous v4SN2iMOyAinda não há avaliações
- 6 Ci Sinif Word Definition 6Documento2 páginas6 Ci Sinif Word Definition 6poladovaaysen11Ainda não há avaliações
- Fabric Data Science 1 150Documento150 páginasFabric Data Science 1 150pascalburumeAinda não há avaliações
- LIFT OFF ModuleDocumento28 páginasLIFT OFF ModulericardoAinda não há avaliações
- Dnyanadeep's IAS: UPSC Essay Series - 7Documento2 páginasDnyanadeep's IAS: UPSC Essay Series - 7Rahul SinghAinda não há avaliações
- Adeyinka Wulemat Olarinmoye - The Images of Women in Yoruban Folktales PDFDocumento12 páginasAdeyinka Wulemat Olarinmoye - The Images of Women in Yoruban Folktales PDFAngel SánchezAinda não há avaliações
- Whats New PDFDocumento74 páginasWhats New PDFDe Raghu Veer KAinda não há avaliações
- MacbethDocumento2 páginasMacbethjtwyfordAinda não há avaliações