Você também pode gostar
- Selección acoplamientos hidraulicos máximos ciclosDocumento9 páginasSelección acoplamientos hidraulicos máximos ciclosKevin Manuel Susunaga RiverosAinda não há avaliações
- Contrato mantenimiento circuito chancado AntapaccayDocumento71 páginasContrato mantenimiento circuito chancado AntapaccayDeyvi Osmar Zegarra VillenaAinda não há avaliações
- Calculo de EnfriamientoDocumento9 páginasCalculo de EnfriamientoOscar Ortiz RodriguezAinda não há avaliações
- Elevador de Cinta TransportadoraDocumento4 páginasElevador de Cinta Transportadoramaverick2660Ainda não há avaliações
- Costos de Acarreo Y Transporte Mineria Subte: Fajas TransportadorasDocumento25 páginasCostos de Acarreo Y Transporte Mineria Subte: Fajas TransportadorasElvis Colonio QuispeAinda não há avaliações
- Ejercicio Catalogo SMC1Documento27 páginasEjercicio Catalogo SMC1Rodolfo Tapia RamirezAinda não há avaliações
- Cambio de partes de caja reductor AG-300Documento36 páginasCambio de partes de caja reductor AG-300Cancio Florez MendozaAinda não há avaliações
- ALCANCE - Mantto - Sistema Climatización y Presurización de Salas EléctricasDocumento13 páginasALCANCE - Mantto - Sistema Climatización y Presurización de Salas EléctricasGiancarloAinda não há avaliações
- Enerpac Cilindros de Gran Tonelaje de Doble Efecto CLRGDocumento4 páginasEnerpac Cilindros de Gran Tonelaje de Doble Efecto CLRGFrancisco Raro AlmuzaraAinda não há avaliações
- Fallas en La Faja TransportadoraaDocumento47 páginasFallas en La Faja TransportadoraaCarlos Pretell RodriguezAinda não há avaliações
- Analisis de Fallas EXCELDocumento7 páginasAnalisis de Fallas EXCELMichael FelipeAinda não há avaliações
- 01 Reporte de Presupuesto OM Gas 2019Documento3 páginas01 Reporte de Presupuesto OM Gas 2019Marcos Condori PacoAinda não há avaliações
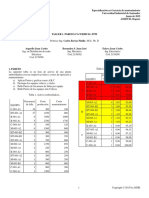
- Taller 1 Mto PreventivoDocumento12 páginasTaller 1 Mto PreventivoJuan Jose Bermudez SilvaAinda não há avaliações
- Balotario de Preguntas (2) MANEJODocumento11 páginasBalotario de Preguntas (2) MANEJODalmer ReyesAinda não há avaliações
- Cálculo Del Reductor Molino 9 X 13 Pta ParagshaDocumento6 páginasCálculo Del Reductor Molino 9 X 13 Pta ParagshaDORKISSAinda não há avaliações
- Analisis de CausasDocumento12 páginasAnalisis de CausasJesús CaychoAinda não há avaliações
- Presion ArterialDocumento6 páginasPresion ArterialFRANCISCO GIANPIER RONDON ASENCIOSAinda não há avaliações
- Plan de Accion Sim1Documento3 páginasPlan de Accion Sim1victorberrospiAinda não há avaliações
- Tablas de Tolerancia y CalculoDocumento19 páginasTablas de Tolerancia y CalculoRodolfo RequenaAinda não há avaliações
- Localización Almacen Centro de GravedadDocumento6 páginasLocalización Almacen Centro de GravedadMARIA ALEJANDRA MEJIA REYESAinda não há avaliações
- Calendario MTTO DIC 2022Documento2 páginasCalendario MTTO DIC 2022Adrian CamachoAinda não há avaliações
- Instalación y Servicio VoighDocumento126 páginasInstalación y Servicio VoighJavier Gaete Obreque100% (1)
- TDH Equipo Bombeo p13Documento1 páginaTDH Equipo Bombeo p13Luis Fernando Vega BasmaAinda não há avaliações
- Programa Mantenimiento Semana 47Documento15 páginasPrograma Mantenimiento Semana 47Pelayo BozaAinda não há avaliações
- Confiabilidad Integral El ActivoDocumento72 páginasConfiabilidad Integral El ActivoUlfran MedinaAinda não há avaliações
- Exposicion CimacDocumento37 páginasExposicion CimacLizbeth AtamariAinda não há avaliações
- Catalago SimalubeDocumento8 páginasCatalago SimalubeJuan Santiago RojasAinda não há avaliações
- Analisis Integral Estructural en PalasDocumento10 páginasAnalisis Integral Estructural en PalasvizcensoAinda não há avaliações
- LSS ToolboxDocumento20 páginasLSS ToolboxFRANK ANDERSON ESPEJO VALDEZAinda não há avaliações
- Analisis Del Ciclo de Vida LCC (Llantas)Documento5 páginasAnalisis Del Ciclo de Vida LCC (Llantas)rjan7peAinda não há avaliações
- Dynamox - Presentacion - Dooble IngenieriaDocumento19 páginasDynamox - Presentacion - Dooble Ingenieriarodrigo301Ainda não há avaliações
- Selección Acoples - CTDocumento7 páginasSelección Acoples - CTJordyLuisSánchezVásquezAinda não há avaliações
- Mantenimiento de acumuladores hidráulicosDocumento13 páginasMantenimiento de acumuladores hidráulicoscarlosgomeznoriegaAinda não há avaliações
- Catalogo GracoDocumento11 páginasCatalogo GracoEdwin A GamboaAinda não há avaliações
- Calculador de Torque (Con Tablas de Los Tipos de Acople Disponibles)Documento12 páginasCalculador de Torque (Con Tablas de Los Tipos de Acople Disponibles)Gary ParedesAinda não há avaliações
- Reporte - DailyNodes 2021Documento553 páginasReporte - DailyNodes 2021NELSON HERNANDEZAinda não há avaliações
- Calculo de Centro de Gravedad de Bus Urbano 1Documento166 páginasCalculo de Centro de Gravedad de Bus Urbano 1Fernando GamboaAinda não há avaliações
- Sibre TM-I 40Documento2 páginasSibre TM-I 40LuHa1Ainda não há avaliações
- Memoria de Calculo de Rodamientos-AsielDocumento3 páginasMemoria de Calculo de Rodamientos-AsielAsiel Isai Gutierrez QuirogaAinda não há avaliações
- Sistema transportador elevador rollizos forestalesDocumento38 páginasSistema transportador elevador rollizos forestalesAdrian MacayaAinda não há avaliações
- RPD 01.07.22 MOL 16 X 22Documento6 páginasRPD 01.07.22 MOL 16 X 22Rully Sanchez AltamiranoAinda não há avaliações
- TD 210-1-EspDocumento68 páginasTD 210-1-EspDiego Alejandro Alvarez VillaAinda não há avaliações
- Informe Del Diseño de Aspersion 21 07 2017 Mod PDFDocumento30 páginasInforme Del Diseño de Aspersion 21 07 2017 Mod PDFMax CamachoAinda não há avaliações
- Hoja Calculo, Costo de Ciclo de VidaDocumento2 páginasHoja Calculo, Costo de Ciclo de VidaAyrton EstradaAinda não há avaliações
- Rock BreakerDocumento2 páginasRock BreakerEddy JuanAinda não há avaliações
- Ejercicio 4-ACR ZEUSDocumento8 páginasEjercicio 4-ACR ZEUSPeter Guerrero BacaAinda não há avaliações
- 6997-0240-001 - D SoboDocumento14 páginas6997-0240-001 - D Sobofreser02Ainda não há avaliações
- Escritos de ChancadoDocumento54 páginasEscritos de ChancadoFrancisco TijouxAinda não há avaliações
- Balanceo PruebaDocumento132 páginasBalanceo PruebaJaime Martin Torres HuamaniAinda não há avaliações
- Criterios BombasDocumento22 páginasCriterios Bombasdiego molanoAinda não há avaliações
- Canal Chavetero y ChavetasDocumento2 páginasCanal Chavetero y ChavetasHelard AlvarezAinda não há avaliações
- Voith 650 TPKL EntrenamientoDocumento53 páginasVoith 650 TPKL EntrenamientorobertoAinda não há avaliações
- Analisis de VibracionesDocumento4 páginasAnalisis de Vibracionesguzaballerolopez100% (1)
- Cálculos para Selección de VentiladorDocumento2 páginasCálculos para Selección de VentiladorJohan MedellinAinda não há avaliações
- Analisis de Fallas en Bombas Centrifugas v2 FinalDocumento25 páginasAnalisis de Fallas en Bombas Centrifugas v2 FinalAlex VarasAinda não há avaliações
- Gestion de ActivosDocumento7 páginasGestion de Activoslessenia machacca qquentaAinda não há avaliações
- Plantilla-FMEA PlastisolDocumento2 páginasPlantilla-FMEA PlastisolSthiden Sanabria ChaconAinda não há avaliações
- Acople Con GrillaDocumento8 páginasAcople Con GrillaLuis TestaAinda não há avaliações
- Eje BalancínDocumento7 páginasEje BalancínCramer Gonzales ElgueraAinda não há avaliações
- Calculo y Diseño de Cinta Transportadora-Danis BolivarDocumento20 páginasCalculo y Diseño de Cinta Transportadora-Danis BolivarJosé Alvarado100% (1)
- Informe FinalDocumento25 páginasInforme FinalYeny Teofila Taipe CabezasAinda não há avaliações
- Caso Dilema Etico ResueltoDocumento4 páginasCaso Dilema Etico ResueltoYeny Teofila Taipe Cabezas100% (1)
- EticaDocumento32 páginasEticaYeny Teofila Taipe CabezasAinda não há avaliações
- Reanimación Cardiopulmonar: ASIGNATURA: Enfermería en Cuidados Intensivos Docente: Florabel Janampa AuccasiDocumento17 páginasReanimación Cardiopulmonar: ASIGNATURA: Enfermería en Cuidados Intensivos Docente: Florabel Janampa AuccasiYeny Teofila Taipe CabezasAinda não há avaliações
- Ventilacion MecanicaDocumento3 páginasVentilacion MecanicaYeny Teofila Taipe CabezasAinda não há avaliações
- Caso Dilema Etico ResueltoDocumento4 páginasCaso Dilema Etico ResueltoYeny Teofila Taipe Cabezas100% (1)
- Ventilacion MecanicaDocumento3 páginasVentilacion MecanicaYeny Teofila Taipe CabezasAinda não há avaliações
- Monitoreo HemodinamicoDocumento15 páginasMonitoreo HemodinamicoYeny Teofila Taipe CabezasAinda não há avaliações
- Medico LegalDocumento23 páginasMedico LegalYeny Teofila Taipe CabezasAinda não há avaliações
- Escalas de Glasglow y RassDocumento10 páginasEscalas de Glasglow y RassYeny Teofila Taipe CabezasAinda não há avaliações
- Reanimación Cardiopulmonar: ASIGNATURA: Enfermería en Cuidados Intensivos Docente: Florabel Janampa AuccasiDocumento17 páginasReanimación Cardiopulmonar: ASIGNATURA: Enfermería en Cuidados Intensivos Docente: Florabel Janampa AuccasiYeny Teofila Taipe CabezasAinda não há avaliações
- Liga Casos Clinicos 2018Documento657 páginasLiga Casos Clinicos 2018Ana Báez100% (1)
- Escalas de Glasglow y RassDocumento10 páginasEscalas de Glasglow y RassYeny Teofila Taipe CabezasAinda não há avaliações
- Monitoreo HemodinamicoDocumento15 páginasMonitoreo HemodinamicoYeny Teofila Taipe CabezasAinda não há avaliações
- Gasometria ArterialDocumento3 páginasGasometria ArterialYeny Teofila Taipe CabezasAinda não há avaliações
- COBRE ListoDocumento51 páginasCOBRE ListoYeny Teofila Taipe CabezasAinda não há avaliações
- Proceso de enfermería en paciente con insuficiencia cardíaca y renalDocumento22 páginasProceso de enfermería en paciente con insuficiencia cardíaca y renalYeny Teofila Taipe CabezasAinda não há avaliações
- Plan de Charla EducativaDocumento8 páginasPlan de Charla EducativaYeny Teofila Taipe CabezasAinda não há avaliações
- Huancaya DR PDFDocumento109 páginasHuancaya DR PDFYeny Teofila Taipe CabezasAinda não há avaliações
- Libro Planes Cuidados Especializada PDFDocumento240 páginasLibro Planes Cuidados Especializada PDFLulu Celina Calvario GuzmanAinda não há avaliações
- Anemia infantil: causas, clasificación y tratamiento de la anemia ferropénicaDocumento33 páginasAnemia infantil: causas, clasificación y tratamiento de la anemia ferropénicaYeny Teofila Taipe CabezasAinda não há avaliações
- Guía MINERÍA cierre minas PerúDocumento62 páginasGuía MINERÍA cierre minas PerúJaime Borda100% (1)
- Apuntes de Geologia para Ingenieria de Minas PDFDocumento670 páginasApuntes de Geologia para Ingenieria de Minas PDFIvanCruzAinda não há avaliações
- Anemia infantil: causas, clasificación y tratamiento de la anemia ferropénicaDocumento33 páginasAnemia infantil: causas, clasificación y tratamiento de la anemia ferropénicaYeny Teofila Taipe CabezasAinda não há avaliações
- 1era Lectura Catalina HuancaDocumento62 páginas1era Lectura Catalina HuancaYeny Teofila Taipe CabezasAinda não há avaliações
- Herspes NeontalDocumento10 páginasHerspes NeontalYeny Teofila Taipe CabezasAinda não há avaliações
- MIbesuea PDFDocumento130 páginasMIbesuea PDFYeny Teofila Taipe CabezasAinda não há avaliações
- Manual Ingenieria Bandas Transportadoras PDFDocumento44 páginasManual Ingenieria Bandas Transportadoras PDFSammy J. Bedoya LopezAinda não há avaliações
- FERRARI Osvaldo Dialogos Con BorgesDocumento9 páginasFERRARI Osvaldo Dialogos Con BorgesPablo IbarraAinda não há avaliações
- Dinámica Atmosférica. Turbulencia PDFDocumento44 páginasDinámica Atmosférica. Turbulencia PDFJuan Carlos SasintuñaAinda não há avaliações
- Adhesion en OdontologiaDocumento5 páginasAdhesion en OdontologiaCristian PazAinda não há avaliações
- Derechos Linguisticos en Chile para La Diversidad Sorda PDFDocumento14 páginasDerechos Linguisticos en Chile para La Diversidad Sorda PDFIgnacio AndresAinda não há avaliações
- DX QuilcasDocumento26 páginasDX QuilcasnicenoconstantinopolAinda não há avaliações
- Her Screenplay EspañolDocumento110 páginasHer Screenplay EspañolOsmely Jose Piña SotoAinda não há avaliações
- Materiales PiezoeléctricosDocumento17 páginasMateriales PiezoeléctricosPablo DelgadoAinda não há avaliações
- Los Diferenes Paladares de Dulces Tipicos de Nuestra Region y Del Pais en GeneralDocumento4 páginasLos Diferenes Paladares de Dulces Tipicos de Nuestra Region y Del Pais en GeneralJose RomeroAinda não há avaliações
- Rigidez Ejercicios Resueltos Parte 1 128140 Downloable 936980Documento16 páginasRigidez Ejercicios Resueltos Parte 1 128140 Downloable 936980JAIME JOSE CHIPANA SORIAAinda não há avaliações
- Confiar en Uno MismoDocumento5 páginasConfiar en Uno MismoluisagonsilAinda não há avaliações
- Terminos de Referencia - Instalaciónaire Acondicionado - Sencico Zonal ChiclayoDocumento7 páginasTerminos de Referencia - Instalaciónaire Acondicionado - Sencico Zonal ChiclayoLalisa gatito de AniAinda não há avaliações
- Indiana Jorrat. Tesis - de Ella Se DecíaDocumento10 páginasIndiana Jorrat. Tesis - de Ella Se DecíaMay MartinezAinda não há avaliações
- Desarrollo de NegociosDocumento12 páginasDesarrollo de NegociosInnovador NavarreteAinda não há avaliações
- Los MayasDocumento9 páginasLos Mayasnano manAinda não há avaliações
- Tema 3 El Derecho AeronauticoDocumento3 páginasTema 3 El Derecho AeronauticovicoinfAinda não há avaliações
- Estatuto de UNAN-LeonDocumento68 páginasEstatuto de UNAN-LeonAlexanderAinda não há avaliações
- Neurociencia del comportamientoDocumento9 páginasNeurociencia del comportamientoYulieth Dayana Lozano BallesterosAinda não há avaliações
- EpocDocumento5 páginasEpocANGELA GISELLE RUIZ AVILAAinda não há avaliações
- Manual Oficial para La Preparación Del SIELEDocumento190 páginasManual Oficial para La Preparación Del SIELEazhelika.96Ainda não há avaliações
- Funciones Del Equipo de Alerta Respuesta de La Dirección Ejecutiva de Vigilancia EpidemiológicaDocumento2 páginasFunciones Del Equipo de Alerta Respuesta de La Dirección Ejecutiva de Vigilancia EpidemiológicaOsvid ZedanoAinda não há avaliações
- Recursos Naturales de PanamaDocumento15 páginasRecursos Naturales de PanamaCRISTINA79% (14)
- Escuelas DerechoDocumento2 páginasEscuelas Derechoruben meridaAinda não há avaliações
- Marketing del café: Análisis de mercado y competidoresDocumento6 páginasMarketing del café: Análisis de mercado y competidoresAdrián Córdoba SarmientoAinda não há avaliações
- Sesión de Aprendizaje Religion SacramentosDocumento6 páginasSesión de Aprendizaje Religion SacramentosYessy Espinoza Huamanlazo100% (1)
- Ord 2964 11 BO 504 CFM y OT PDFDocumento84 páginasOrd 2964 11 BO 504 CFM y OT PDFFernando JardinAinda não há avaliações
- Análisis y Modificación de la ConductaDocumento18 páginasAnálisis y Modificación de la ConductamarleimanAinda não há avaliações
- CrioscopíaDocumento6 páginasCrioscopíaGreys ChuquimarcaAinda não há avaliações
- Contrato auditoría segurosDocumento11 páginasContrato auditoría segurosFxbro HdxlgoAinda não há avaliações
- Evaluacion Nro. 2 AdministracionDocumento8 páginasEvaluacion Nro. 2 AdministracionMartinAlejandroAinda não há avaliações
- Economía Del Misterio y Misterio de La EconomíaDocumento2 páginasEconomía Del Misterio y Misterio de La EconomíaCamilo Andres Arias RojasAinda não há avaliações