Você também pode gostar
- La Ingeniería AutomotrizDocumento183 páginasLa Ingeniería AutomotrizAgustin Salazar90% (10)
- La investigación en ingeniería: Análisis y solución de casos desde el aulaNo EverandLa investigación en ingeniería: Análisis y solución de casos desde el aulaNota: 4 de 5 estrelas4/5 (2)
- Agenda de Buho 2023Documento47 páginasAgenda de Buho 2023Noris Isabel BarahonaAinda não há avaliações
- Manual de laboratorio de estructurasNo EverandManual de laboratorio de estructurasAinda não há avaliações
- 03 - La Fantasía de Papá - Nicolás Hyde.Documento122 páginas03 - La Fantasía de Papá - Nicolás Hyde.Zayra AlvarezAinda não há avaliações
- Parametros Principales en La ElectroDocumento6 páginasParametros Principales en La ElectroJhonatan Contreras AparicioAinda não há avaliações
- Diseño de Riego en Parques y JardinesDocumento151 páginasDiseño de Riego en Parques y Jardinestonniuccio100% (3)
- Trabajo de Grado Grupo 1 PDFDocumento35 páginasTrabajo de Grado Grupo 1 PDFFABIO ANDRES FRANCO GARCIAAinda não há avaliações
- Enseñanza basada en tecnologías interactivas digitales aplicadas al entrenamiento de trabajo en alturasNo EverandEnseñanza basada en tecnologías interactivas digitales aplicadas al entrenamiento de trabajo en alturasAinda não há avaliações
- Incapacidades IMSSDocumento1 páginaIncapacidades IMSSricardo_mqAinda não há avaliações
- Modelo - Malcolm BaldrigeDocumento30 páginasModelo - Malcolm BaldrigeJhonatan Contreras Aparicio100% (1)
- Analisis No Lineal-Momento CurvaturaDocumento114 páginasAnalisis No Lineal-Momento CurvaturaJuan Arbieto Tello100% (4)
- 1 Gestion Del Mantto Panorama ActualDocumento73 páginas1 Gestion Del Mantto Panorama ActualJhonatan Contreras AparicioAinda não há avaliações
- GeoVictoriaApp v2Documento17 páginasGeoVictoriaApp v2Maria Paz CárdenasAinda não há avaliações
- Unidad 1 Guias de MatemáticaDocumento23 páginasUnidad 1 Guias de MatemáticaXimena Quilodrán FuentesAinda não há avaliações
- Diseño de Una Órtesis Activa para Rehabilitación de Codo Con Técnicas de Impresión en 3DDocumento6 páginasDiseño de Una Órtesis Activa para Rehabilitación de Codo Con Técnicas de Impresión en 3DJosé Luis Hernández SorianoAinda não há avaliações
- Proyecto Silla RuedasDocumento40 páginasProyecto Silla RuedasJavier Salvador Perez Gamez100% (1)
- 366 844 2 PBDocumento21 páginas366 844 2 PBLuceroMilagrosCubaMirandaAinda não há avaliações
- Plataforma - Salvaescaleras CarenDocumento36 páginasPlataforma - Salvaescaleras CarenStephany JaramilloAinda não há avaliações
- Banda TransportadoraDocumento16 páginasBanda TransportadoraEd Abraham ReeyessAinda não há avaliações
- Monografía ExoesqueletoDocumento88 páginasMonografía ExoesqueletoKazurejssnAinda não há avaliações
- Rehabilitador Codo 2020Documento17 páginasRehabilitador Codo 2020lauracespedesmontecinosAinda não há avaliações
- Trabajo Final de Dibujo Grupo 10Documento15 páginasTrabajo Final de Dibujo Grupo 10Alejandro BobadillaAinda não há avaliações
- Diseño de Dispositivo Mecánico para El Traslado de Pacientes Con Discapacidad MotrizDocumento14 páginasDiseño de Dispositivo Mecánico para El Traslado de Pacientes Con Discapacidad Motrizsoulforgames14kAinda não há avaliações
- Ime 226Documento207 páginasIme 226Diego jose Alvarado PérezAinda não há avaliações
- 1305 4055 1 PBDocumento19 páginas1305 4055 1 PBjoseAinda não há avaliações
- TF Formacion 24-11-21Documento30 páginasTF Formacion 24-11-21AbelB.JurupeAinda não há avaliações
- Proyecto Final - Informe PDFDocumento56 páginasProyecto Final - Informe PDFLuis BaezAinda não há avaliações
- Presentacion IeeeDocumento35 páginasPresentacion IeeeDiego Luis Ortiz MoralesAinda não há avaliações
- Prototipo de Sistema Mecatrónico de Rehabilitador Pasivo de Rodilla Con Estimulación Por Corriente GalvánicaDocumento6 páginasPrototipo de Sistema Mecatrónico de Rehabilitador Pasivo de Rodilla Con Estimulación Por Corriente GalvánicaHamilton PoincareAinda não há avaliações
- 2 Irving Ulises Hernandez Miguel 112Documento22 páginas2 Irving Ulises Hernandez Miguel 112Armando Galarza SarmientoAinda não há avaliações
- Salazar Guzman Richard Bryan F002 ParejaDocumento12 páginasSalazar Guzman Richard Bryan F002 ParejaValeria Mesías RodríguezAinda não há avaliações
- Diseño y Fabricación de Un Sistema Mecánico Elevador para El Manejo de Una Cámara de VacíoDocumento12 páginasDiseño y Fabricación de Un Sistema Mecánico Elevador para El Manejo de Una Cámara de VacíoAogiri DaAinda não há avaliações
- Modelo de Un Muelle de Ballesta Con Fricción Entre HojasDocumento17 páginasModelo de Un Muelle de Ballesta Con Fricción Entre HojasdomingocattoniAinda não há avaliações
- CIINDET2013 Entendiendola MRDocumento7 páginasCIINDET2013 Entendiendola MRRodrigo GonzalezAinda não há avaliações
- Paper Robot Paralelo Rehabilitación TobilloDocumento9 páginasPaper Robot Paralelo Rehabilitación TobilloMiguel PérezAinda não há avaliações
- Analisis Tecnico Economico de La Aplicacion de Un Sistema de Control y Proteccion para Se Electricas Bajo El Estandar Iec61850Documento139 páginasAnalisis Tecnico Economico de La Aplicacion de Un Sistema de Control y Proteccion para Se Electricas Bajo El Estandar Iec61850HugoAinda não há avaliações
- Trabajo de Investigación FINAL Corregido2Documento30 páginasTrabajo de Investigación FINAL Corregido2Hamilton PoincareAinda não há avaliações
- PradaVillamizar TesisMaestriaPDFADocumento111 páginasPradaVillamizar TesisMaestriaPDFAArmin Iban Illatarco CondoriAinda não há avaliações
- Sistema Mecanico para La Recuperacion Motriz en PeDocumento30 páginasSistema Mecanico para La Recuperacion Motriz en PeKAREN VASQUEZAinda não há avaliações
- Diseño de Equipo de Apoyo para Rehabilitación de Rodilla PostcirugiaDocumento66 páginasDiseño de Equipo de Apoyo para Rehabilitación de Rodilla PostcirugiaCarlos Manuel GomezAinda não há avaliações
- Proyecto Integrador - Estado Del Arte OkDocumento40 páginasProyecto Integrador - Estado Del Arte OkKamilito Millos FCAinda não há avaliações
- Libro 8 Nuevo2Documento186 páginasLibro 8 Nuevo2CRISTIAN ANTONIO PEREZ ATENCIAAinda não há avaliações
- Estudio Con JackDocumento7 páginasEstudio Con JackjahanaAinda não há avaliações
- Ups KT01132 PDFDocumento188 páginasUps KT01132 PDFcarlosronquillopintoAinda não há avaliações
- Deflectometría PDFDocumento21 páginasDeflectometría PDFFernán SeverichAinda não há avaliações
- 301-Texto Del Artículo-750-1-10-20190313Documento10 páginas301-Texto Del Artículo-750-1-10-20190313BENNIS ALBERTO SANTOS DOMINGUEZAinda não há avaliações
- Trabajo Final de FisicaDocumento16 páginasTrabajo Final de FisicaJefferson GASTELO MILIANAinda não há avaliações
- Trabajo FinalDocumento7 páginasTrabajo FinalCarlos HernandezAinda não há avaliações
- Sistema de Locomoción para Discapacitados, Automatizado Con Un Procesador Myrio Acoplado en Una Silla de RuedasDocumento13 páginasSistema de Locomoción para Discapacitados, Automatizado Con Un Procesador Myrio Acoplado en Una Silla de RuedasHugoRogerAinda não há avaliações
- Universidad Internacional Del Ecuador - TESIS ANTEPROYECTODocumento23 páginasUniversidad Internacional Del Ecuador - TESIS ANTEPROYECTOk7mpwb5h2fAinda não há avaliações
- Diseño de Una Camilla (Art.)Documento12 páginasDiseño de Una Camilla (Art.)Anghel Ccuno FloresAinda não há avaliações
- DMPA 03 - III UNIDAD - Infraestructura de DiversionDocumento14 páginasDMPA 03 - III UNIDAD - Infraestructura de DiversionHuaman LuisAinda não há avaliações
- Optimización de La Programación Del Mantenimiento de Activos de Transmisión de Energía en Ambientes Altamente Restrictivos y Mercado ReguladoDocumento103 páginasOptimización de La Programación Del Mantenimiento de Activos de Transmisión de Energía en Ambientes Altamente Restrictivos y Mercado ReguladoRaul DueñasAinda não há avaliações
- Logica Difusa - Pendulo InvertidoDocumento11 páginasLogica Difusa - Pendulo InvertidoIsabel PaulaAinda não há avaliações
- Reporte de Proyecto ResidenciasDocumento67 páginasReporte de Proyecto ResidenciasKevin Daniel Toledo MartinezAinda não há avaliações
- Protocolo de Investigación 3Documento48 páginasProtocolo de Investigación 3Charles EspinozaAinda não há avaliações
- Perfil Proyecto ExoesqueletoDocumento10 páginasPerfil Proyecto ExoesqueletoLI MacutelaAinda não há avaliações
- 2018 - Presentación Del Curso - Control de Motores - IngDocumento26 páginas2018 - Presentación Del Curso - Control de Motores - IngKarla AraujoAinda não há avaliações
- Proyecto ElectromecanicoDocumento38 páginasProyecto ElectromecanicoClaudia Cecilia MontoyaAinda não há avaliações
- SAF1324-Mecanica de MaterialesDocumento9 páginasSAF1324-Mecanica de Materialesjose angel carmona rodriguezAinda não há avaliações
- Proyecto de Trabajo de InvestigaciónDocumento15 páginasProyecto de Trabajo de InvestigaciónNaysha AlaniaAinda não há avaliações
- C Articulo ExoequeletosDocumento17 páginasC Articulo ExoequeletosJuan David CruzAinda não há avaliações
- Vega Fernández GeremiasDocumento134 páginasVega Fernández GeremiasRuben Siancas Zapata100% (1)
- ProyectoDocumento6 páginasProyectoSheryl100% (1)
- Caracterización Mecánica o Modelamiento Estructural de Un Disipador de Fricción. Ing. Germán Ricardo Hernández DíazDocumento127 páginasCaracterización Mecánica o Modelamiento Estructural de Un Disipador de Fricción. Ing. Germán Ricardo Hernández DíazErika MartínezAinda não há avaliações
- Propuesta Proyecto OleoneumaticaDocumento3 páginasPropuesta Proyecto OleoneumaticaOscar Leonardo Peña PinzónAinda não há avaliações
- Tesis IUPSMDocumento31 páginasTesis IUPSMEliana Fernandez82% (11)
- Aplicación de tecnologías para la sustentabilidad y su impacto en el medio ambiente y la sociedad: Trabajo colaborativo de Cuerpos Académicos e Investigadores de Puebla, Tlaxcala, Oaxaca y Veracruz, México, Carabobo, Venezuela y Huancavelica, Perú de la Red de Investigación Multidisciplinaria para el Desarrollo RegionalNo EverandAplicación de tecnologías para la sustentabilidad y su impacto en el medio ambiente y la sociedad: Trabajo colaborativo de Cuerpos Académicos e Investigadores de Puebla, Tlaxcala, Oaxaca y Veracruz, México, Carabobo, Venezuela y Huancavelica, Perú de la Red de Investigación Multidisciplinaria para el Desarrollo RegionalAinda não há avaliações
- CONSOLIDADO TRM - Campaña 04Documento11 páginasCONSOLIDADO TRM - Campaña 04Jhonatan Contreras AparicioAinda não há avaliações
- 11.el Micro ProcesadorDocumento13 páginas11.el Micro ProcesadorJhonatan Contreras AparicioAinda não há avaliações
- Derecho SocietarioDocumento17 páginasDerecho SocietarioJhonatan Contreras AparicioAinda não há avaliações
- Bioped Pacientes Con Espina Bifida-Rev MédicaDocumento7 páginasBioped Pacientes Con Espina Bifida-Rev MédicaJhonatan Contreras AparicioAinda não há avaliações
- Indirecto Proforma Obra 02-104 Puente El Refugio Valle de BravoDocumento2 páginasIndirecto Proforma Obra 02-104 Puente El Refugio Valle de BravoJose A. Abrajan OrtizAinda não há avaliações
- A1-Lesson 03Documento6 páginasA1-Lesson 03Elmer Ramos100% (1)
- Memoria para CatDocumento22 páginasMemoria para CatDiogenes BarcaAinda não há avaliações
- Art - 006 Sandblasting y Pintura Avencasa DaysDocumento15 páginasArt - 006 Sandblasting y Pintura Avencasa DaysPETROLAGO EPC & WELDING, C.AAinda não há avaliações
- Diferencias Entre Vino Joven, Crianza y Reservas PDFDocumento2 páginasDiferencias Entre Vino Joven, Crianza y Reservas PDFmglmglgmlAinda não há avaliações
- EL ADJETIVO - InglésDocumento4 páginasEL ADJETIVO - IngléshareckAinda não há avaliações
- Procedimiento Constructivo Empleando CalDocumento3 páginasProcedimiento Constructivo Empleando CalOmar Joel Purizaca CamachoAinda não há avaliações
- Negocio ConjuntoDocumento5 páginasNegocio Conjuntodahi ojedaAinda não há avaliações
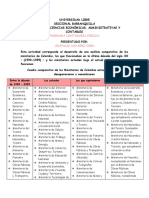
- Cuadro Comparativo Ministerios de ColombiaDocumento5 páginasCuadro Comparativo Ministerios de ColombiaAnayalisAinda não há avaliações
- Dijazz 01 - 2022Documento57 páginasDijazz 01 - 2022La Vero OleasAinda não há avaliações
- Incoterms Cif CPT CipDocumento16 páginasIncoterms Cif CPT CipLuis Miguel Ninamango NinamangoAinda não há avaliações
- Sergio MendezDocumento4 páginasSergio MendezFredi CastilloAinda não há avaliações
- Mecanismo de Transporte A Través de La Membrana CelularDocumento10 páginasMecanismo de Transporte A Través de La Membrana Celularyohada guareno artilesAinda não há avaliações
- BOOKINGDocumento4 páginasBOOKINGMaffe ArellanoAinda não há avaliações
- CocainaDocumento18 páginasCocainaarianaAinda não há avaliações
- FF - SRE - 006 Convenio de Renuncia para Adquisición de Bienes Inmuebles Fuera de Zona RestringidaDocumento2 páginasFF - SRE - 006 Convenio de Renuncia para Adquisición de Bienes Inmuebles Fuera de Zona RestringidaYaritza FloresAinda não há avaliações
- 92-2008 Taludes de Corte Estabilizados en Venezuela Mediante Pantallas de Concreto Proyectado AncladasDocumento8 páginas92-2008 Taludes de Corte Estabilizados en Venezuela Mediante Pantallas de Concreto Proyectado AncladasOriana ContrerasAinda não há avaliações
- DR800Documento87 páginasDR800Buenaventura Jose Huamani TalaveranoAinda não há avaliações
- Práctica #3Documento4 páginasPráctica #3Andres Ruben Ibañez Rosales50% (2)
- Ficha de Trabajo Seguridad VialDocumento4 páginasFicha de Trabajo Seguridad VialSusi LoriAinda não há avaliações
- Revista Tecnologia Minera 41Documento271 páginasRevista Tecnologia Minera 41Manuel AlonsoAinda não há avaliações
- Y Después Fue... ¡La Forma!Documento16 páginasY Después Fue... ¡La Forma!Guías de los Museos Científicos Coruñeses (=mc2)100% (7)
- Aminoacidos y ProteinasDocumento21 páginasAminoacidos y ProteinasVICKYCITAAinda não há avaliações
- Transporte 01Documento16 páginasTransporte 01Ana milena nobleAinda não há avaliações