Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- BOM E - Bike Electrical V1.0Documento10 páginasBOM E - Bike Electrical V1.0SHUBHAM SRIVASTAVA100% (1)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Mixed Tenses ExercisesDocumento5 páginasMixed Tenses ExercisesmariamcarullaAinda não há avaliações
- Mixed Tenses ExercisesDocumento5 páginasMixed Tenses ExercisesmariamcarullaAinda não há avaliações
- Buck ReportDocumento9 páginasBuck ReportNaeem GulAinda não há avaliações
- Electrical Power Systems Wadhwa 8Documento1 páginaElectrical Power Systems Wadhwa 8teceee100% (1)
- Technical Engineering College - Department of Electrical Power EngineeringDocumento3 páginasTechnical Engineering College - Department of Electrical Power EngineeringHaider AlrudainyAinda não há avaliações
- Programmable Logic Controllers Plc-Fu-PicDocumento1 páginaProgrammable Logic Controllers Plc-Fu-PicHaider AlrudainyAinda não há avaliações
- Thesis OrginizationDocumento1 páginaThesis OrginizationHaider AlrudainyAinda não há avaliações
- Advance Microprocessor and MicrocontrollerDocumento2 páginasAdvance Microprocessor and MicrocontrollerHaider AlrudainyAinda não há avaliações
- Writing GDocumento12 páginasWriting GHaider AlrudainyAinda não há avaliações
- PLC Maintenance and Troubleshooting - Module 1: - Intro To PLC'sDocumento57 páginasPLC Maintenance and Troubleshooting - Module 1: - Intro To PLC'sHaider AlrudainyAinda não há avaliações
- Electrical Exam222Documento2 páginasElectrical Exam222Haider AlrudainyAinda não há avaliações
- Untitled 2Documento10 páginasUntitled 2Haider AlrudainyAinda não há avaliações
- Environment ExamDocumento3 páginasEnvironment ExamHaider AlrudainyAinda não há avaliações
- Lab Exer 0A Batman Needs Your Help!Documento2 páginasLab Exer 0A Batman Needs Your Help!Haider AlrudainyAinda não há avaliações
- Mems Power-Gating PDFDocumento6 páginasMems Power-Gating PDFHaider AlrudainyAinda não há avaliações
- Power Gating NemsDocumento6 páginasPower Gating NemsHaider AlrudainyAinda não há avaliações
- DFT - Slides Power ElectronicDocumento14 páginasDFT - Slides Power ElectronicHaider AlrudainyAinda não há avaliações
- 300 Alrudainy 48 Slides Modify1Documento1 página300 Alrudainy 48 Slides Modify1Haider AlrudainyAinda não há avaliações
- 300 Alrudainy 48 Slides Modify1Documento1 página300 Alrudainy 48 Slides Modify1Haider AlrudainyAinda não há avaliações
- Nems Cmos MemsDocumento2 páginasNems Cmos MemsHaider AlrudainyAinda não há avaliações
- Mems NemsDocumento30 páginasMems NemsHaider AlrudainyAinda não há avaliações
- Balancing Regularity and Burstiness in New Computer Systems: Async 2014 ConferenceDocumento16 páginasBalancing Regularity and Burstiness in New Computer Systems: Async 2014 ConferenceHaider AlrudainyAinda não há avaliações
- GALS Partitioning by Behavioural in Petri NetsDocumento10 páginasGALS Partitioning by Behavioural in Petri NetsHaider AlrudainyAinda não há avaliações
- PLC FuzzyDocumento117 páginasPLC FuzzyHaider AlrudainyAinda não há avaliações
- Druck Version YuDocumento149 páginasDruck Version YuHaider AlrudainyAinda não há avaliações
- 2014 ISLPED Smart ButterflyDocumento4 páginas2014 ISLPED Smart ButterflyHaider AlrudainyAinda não há avaliações
- Emf1 SyllabusDocumento2 páginasEmf1 SyllabusHaider AlrudainyAinda não há avaliações
- New Microsoft Word FGHFGHFGDocumento2 páginasNew Microsoft Word FGHFGHFGHaider AlrudainyAinda não há avaliações
- Cmos Charge PumpDocumento4 páginasCmos Charge PumpMohammed KhairyAinda não há avaliações
- Basic Fpga Arch XilinxDocumento39 páginasBasic Fpga Arch XilinxAli AhmadAinda não há avaliações
- Implementation of The 2D DCT On FPGADocumento3 páginasImplementation of The 2D DCT On FPGAHaider AlrudainyAinda não há avaliações
- Eng Cs 82181 Soft Shell Catalog 0508 82181 Soft Shell Catalog-Aav10Documento232 páginasEng Cs 82181 Soft Shell Catalog 0508 82181 Soft Shell Catalog-Aav10norbertscribdAinda não há avaliações
- Faculty of Natural and Applied Sciences Department of Physics PHY 108 Electricity and Magnetism Experiment 4: TransformerDocumento7 páginasFaculty of Natural and Applied Sciences Department of Physics PHY 108 Electricity and Magnetism Experiment 4: TransformerChukwunomso UnaoguAinda não há avaliações
- 12.L-LT PVC Power CableDocumento3 páginas12.L-LT PVC Power CableAnkur SinhaAinda não há avaliações
- Generator Type Eco 40-3S/4Documento5 páginasGenerator Type Eco 40-3S/4DEEPAKAinda não há avaliações
- Catalogue He Thong Bao Chay Formosa Dia ChiDocumento6 páginasCatalogue He Thong Bao Chay Formosa Dia ChisvirkomartinkoAinda não há avaliações
- ACS601 Manual PDFDocumento92 páginasACS601 Manual PDFJAinda não há avaliações
- Coils For Din Plug ConnectionDocumento1 páginaCoils For Din Plug ConnectionjcAinda não há avaliações
- 16 Switches & Sockets MOU Dimensions PDFDocumento3 páginas16 Switches & Sockets MOU Dimensions PDFZeeshan YasinAinda não há avaliações
- Meanwell Catalog - Industrial - May-17 From Manav Automation - Meanwell Power Supply DealerDocumento112 páginasMeanwell Catalog - Industrial - May-17 From Manav Automation - Meanwell Power Supply DealermanavaniAinda não há avaliações
- Alto-DPA2500 4000 Service ManualDocumento60 páginasAlto-DPA2500 4000 Service ManualChuYurAinda não há avaliações
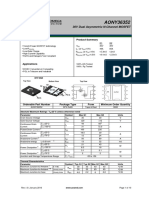
- AONY36352: 30V Dual Asymmetric N-Channel MOSFETDocumento10 páginasAONY36352: 30V Dual Asymmetric N-Channel MOSFETrobertjavi1983Ainda não há avaliações
- Ee2bjt 1 QDocumento90 páginasEe2bjt 1 QDr. RISHA MALAinda não há avaliações
- Littelfuse Varistor LSP10 Datasheet PDFDocumento3 páginasLittelfuse Varistor LSP10 Datasheet PDFedurk85Ainda não há avaliações
- Vishay Siliconix: Features ApplicationsDocumento4 páginasVishay Siliconix: Features ApplicationsJuan CarlosAinda não há avaliações
- Poly1650 LightwayDocumento2 páginasPoly1650 Lightwayjcrodriguez83Ainda não há avaliações
- Datasheet RFD16 N05Documento8 páginasDatasheet RFD16 N05Nicolau FrançaAinda não há avaliações
- Experiment 01 - Aes LabDocumento2 páginasExperiment 01 - Aes LabRAVI DUTT0% (1)
- Mergency Ower Estoration: Single Line Diagram of STG Power SystemDocumento6 páginasMergency Ower Estoration: Single Line Diagram of STG Power SystemGuitarist Ratan DebnathAinda não há avaliações
- Collector DrawingsDocumento2 páginasCollector DrawingsMohammad ShayanAinda não há avaliações
- Earthing System - Wikipedia, The Free EncyclopediaDocumento9 páginasEarthing System - Wikipedia, The Free EncyclopediaYuvaraj ChandrasekaranAinda não há avaliações
- ECEN 214 Lab 4Documento14 páginasECEN 214 Lab 4Shoaib AhmedAinda não há avaliações
- Ews 1021Documento24 páginasEws 1021MilanAinda não há avaliações
- Field Effect Transistors (FET) : Examples Frequency ResponseDocumento19 páginasField Effect Transistors (FET) : Examples Frequency ResponseJayashree MoorthyAinda não há avaliações
- Syn Gen Transient AnalysisDocumento17 páginasSyn Gen Transient AnalysisNilush JayawardanaAinda não há avaliações
- ProjectDocumento22 páginasProjectSandeep SharmaAinda não há avaliações
- Bosch Alternator Sb4249e00 PDFDocumento1.651 páginasBosch Alternator Sb4249e00 PDFDoDuyBac100% (6)
- Tut 2 AnalougeDocumento7 páginasTut 2 AnalougeMoh FathiAinda não há avaliações