Você também pode gostar
- Valve Body PDFDocumento9 páginasValve Body PDFTimur TOT100% (2)
- Fiber Optic Trainer/ Fiber & OSP TechnicianDocumento7 páginasFiber Optic Trainer/ Fiber & OSP Technicianapi-78570706Ainda não há avaliações
- Foundations of Materials Science and Engineering: William F. Smith Javad HashemiDocumento15 páginasFoundations of Materials Science and Engineering: William F. Smith Javad Hashemialienkanibal0% (1)
- Lab 4Documento15 páginasLab 4Aliqpsk AlasadyAinda não há avaliações
- 8J Summary SheetDocumento2 páginas8J Summary Sheet박찬우Ainda não há avaliações
- Exam Flashcards: by Jonathan DonadoDocumento520 páginasExam Flashcards: by Jonathan Donadosolarstuff100% (1)
- D 2510 - 94 R98Documento3 páginasD 2510 - 94 R98David Cazorla100% (1)
- EN 1991-1-4 NA enDocumento4 páginasEN 1991-1-4 NA enanuj3936100% (1)
- Problems PDFDocumento9 páginasProblems PDFEduarGelvezAinda não há avaliações
- BurnerDocumento4 páginasBurnerAhmed Mohamed KhalilAinda não há avaliações
- Ism CodeDocumento9 páginasIsm CodePraneel KurhadeAinda não há avaliações
- Esquema Elétrico NGD 9.3Documento2 páginasEsquema Elétrico NGD 9.3LuisCarlosKovalchuk100% (1)
- Applying Six Sigma at 3MDocumento13 páginasApplying Six Sigma at 3MdchAinda não há avaliações
- DSP Lab 4Documento11 páginasDSP Lab 4zinabuAinda não há avaliações
- EEE312 Lab Sheet 3 Revised - SumDocumento8 páginasEEE312 Lab Sheet 3 Revised - SumMasud SarkerAinda não há avaliações
- Experiment 7Documento7 páginasExperiment 7leirbagtwoAinda não há avaliações
- SNS Lab14Documento12 páginasSNS Lab14I190845 Samana NayyabAinda não há avaliações
- Module 4: Laplace and Z Transform Problem Set 4Documento18 páginasModule 4: Laplace and Z Transform Problem Set 4Hotib PerwiraAinda não há avaliações
- Matlab Basics: ECEN 605 Linear Control Systems Instructor: S.P. BhattacharyyaDocumento36 páginasMatlab Basics: ECEN 605 Linear Control Systems Instructor: S.P. BhattacharyyapitapitulAinda não há avaliações
- Lab 4. LTI Systems, The Z-Transform, and An Introduc-Tion To FilteringDocumento15 páginasLab 4. LTI Systems, The Z-Transform, and An Introduc-Tion To FilteringWilmer More PalominoAinda não há avaliações
- Lab 1RTDocumento8 páginasLab 1RTMatlali SeutloaliAinda não há avaliações
- Lab 4. LTI Systems, The Z-Transform, and An Introduc-Tion To FilteringDocumento15 páginasLab 4. LTI Systems, The Z-Transform, and An Introduc-Tion To Filteringcuterose95Ainda não há avaliações
- EE338 Tutorial 7Documento5 páginasEE338 Tutorial 7ojasvi kathuriaAinda não há avaliações
- Assignment 2 Matlab RegProbsDocumento4 páginasAssignment 2 Matlab RegProbsMohammed BanjariAinda não há avaliações
- Index: Exp No. Experiment Name Date of Performance Date of Checking Signature MarksDocumento41 páginasIndex: Exp No. Experiment Name Date of Performance Date of Checking Signature MarksAvinash JhaAinda não há avaliações
- Statistical Digital Signal Processing and Modeling Exam November 2017Documento3 páginasStatistical Digital Signal Processing and Modeling Exam November 2017Alexander LouwerseAinda não há avaliações
- 20011P0417 DSP Matlab AssignmentDocumento12 páginas20011P0417 DSP Matlab AssignmentNARENDRAAinda não há avaliações
- Lab 4Documento5 páginasLab 4My citaraAinda não há avaliações
- 8 X TransferDocumento12 páginas8 X TransferTaku Angwa Otto CHEAinda não há avaliações
- Application of MATLAB "Network Characteristic and Frequency Response"Documento7 páginasApplication of MATLAB "Network Characteristic and Frequency Response"momen ShaheenAinda não há avaliações
- Digital Signal ProcessingDocumento20 páginasDigital Signal Processingusamadar707Ainda não há avaliações
- LAB 3: Difference Equations, Z-Transforms, Pole-Zero Diagrams, Bibo Stability and Quantization EffectsDocumento5 páginasLAB 3: Difference Equations, Z-Transforms, Pole-Zero Diagrams, Bibo Stability and Quantization EffectsAnthony BoulosAinda não há avaliações
- Definit IntegralDocumento5 páginasDefinit IntegralMohnish KodukullaAinda não há avaliações
- Assignment 3Documento5 páginasAssignment 3Avirup DasguptaAinda não há avaliações
- Libro Fasshauer Numerico AvanzadoDocumento151 páginasLibro Fasshauer Numerico AvanzadoCarlysMendozaamorAinda não há avaliações
- DSP Lab Expt 3 EECE GITAM-19-23Documento5 páginasDSP Lab Expt 3 EECE GITAM-19-23gowri thumburAinda não há avaliações
- BMAT101P Lab Assignment 2Documento4 páginasBMAT101P Lab Assignment 2Harshit Kumar SinghAinda não há avaliações
- Basics of Wavelets: Isye8843A, Brani Vidakovic Handout 20Documento27 páginasBasics of Wavelets: Isye8843A, Brani Vidakovic Handout 20Abbas AbbasiAinda não há avaliações
- Lab 2 DSP. Linear Time-Invariant SystemDocumento15 páginasLab 2 DSP. Linear Time-Invariant SystemTrí TừAinda não há avaliações
- Matlab QuestionsDocumento9 páginasMatlab QuestionsNimal_V_Anil_2526100% (2)
- E3.07 DSP 2000Documento20 páginasE3.07 DSP 2000Mustafamna Al SalamAinda não há avaliações
- DSP Lab 2RTDocumento5 páginasDSP Lab 2RTMatlali SeutloaliAinda não há avaliações
- Instructions:: Gujarat Technological UniversityDocumento3 páginasInstructions:: Gujarat Technological UniversityJaineshAinda não há avaliações
- Mathcad FunctionsDocumento33 páginasMathcad FunctionsAnge Cantor-dela CruzAinda não há avaliações
- Lab 3Documento4 páginasLab 3Trang PhamAinda não há avaliações
- Matlab Exercises: IP Summer School at UW: 1 Basic Matrix ManipulationDocumento6 páginasMatlab Exercises: IP Summer School at UW: 1 Basic Matrix ManipulationDierk LüdersAinda não há avaliações
- Convolução e EspectroDocumento24 páginasConvolução e EspectroEdna MariaAinda não há avaliações
- Digital Control System - CompressedDocumento18 páginasDigital Control System - CompressedSukhpal SinghAinda não há avaliações
- Final Solutions - EE341Documento5 páginasFinal Solutions - EE341hungdt4Ainda não há avaliações
- Chap 3Documento40 páginasChap 3eshbliAinda não há avaliações
- 12 Nonlinear Dynamics & Dynamical Systems 12.6 Chaos and Shadowing (10 Units)Documento5 páginas12 Nonlinear Dynamics & Dynamical Systems 12.6 Chaos and Shadowing (10 Units)ph20c032 Rajarsi PalAinda não há avaliações
- EE5130: Digital Signal ProcessingDocumento3 páginasEE5130: Digital Signal ProcessingSHUBHAM ANAND VERMA EE20M540Ainda não há avaliações
- Quiz4 SolDocumento19 páginasQuiz4 Soldjun033Ainda não há avaliações
- DSP Quiz 2. Class: - , Student ID: - , NameDocumento2 páginasDSP Quiz 2. Class: - , Student ID: - , Name捷萬Ainda não há avaliações
- Detyre Kursi ELN II ADocumento9 páginasDetyre Kursi ELN II AEdlir PetroshiAinda não há avaliações
- ' - Magic: Recovery of Sparse Signals Via Convex ProgrammingDocumento19 páginas' - Magic: Recovery of Sparse Signals Via Convex ProgrammingLan VũAinda não há avaliações
- DSP Lab Sheet 2 PDFDocumento50 páginasDSP Lab Sheet 2 PDFSreekrishna DasAinda não há avaliações
- 9.triple Integrals - MatlabDocumento9 páginas9.triple Integrals - Matlabsamspamz946Ainda não há avaliações
- Massachusetts Institute of Technology Department of Electrical Engineering and Computer ScienceDocumento12 páginasMassachusetts Institute of Technology Department of Electrical Engineering and Computer ScienceNguyen Duc TaiAinda não há avaliações
- 12 - 1 - 24c - F1B018074 - Baiq Hidayatul ZohriahDocumento24 páginas12 - 1 - 24c - F1B018074 - Baiq Hidayatul ZohriahRiki SaputraAinda não há avaliações
- Ca Array 9 16Documento8 páginasCa Array 9 16Manjunath RamachandraAinda não há avaliações
- Discrete-Time Signals and Systems: Gao Xinbo School of E.E., Xidian UnivDocumento40 páginasDiscrete-Time Signals and Systems: Gao Xinbo School of E.E., Xidian UnivThagiat Ahzan AdpAinda não há avaliações
- Nahp1 2020 PDFDocumento4 páginasNahp1 2020 PDFVangheli TVAinda não há avaliações
- MA111 Lec8 D3D4Documento33 páginasMA111 Lec8 D3D4pahnhnykAinda não há avaliações
- 7889 PDFDocumento12 páginas7889 PDFColectivo RizomaAinda não há avaliações
- Minimax: 1 The Parks-Mcclellan Filter Design MethodDocumento11 páginasMinimax: 1 The Parks-Mcclellan Filter Design MethodCristóbal Eduardo Carreño MosqueiraAinda não há avaliações
- Ee503 Fall2015 hw3Documento3 páginasEe503 Fall2015 hw3huriajannat016Ainda não há avaliações
- Digital Signal Processing 2001: U Z U A AzDocumento16 páginasDigital Signal Processing 2001: U Z U A AzMustafamna Al SalamAinda não há avaliações
- Spectral Estimation Assignment 2Documento3 páginasSpectral Estimation Assignment 2mdshakib688Ainda não há avaliações
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Ainda não há avaliações
- Continuous Action Reinforcement Learning Automata: Performance and ConvergenceDocumento6 páginasContinuous Action Reinforcement Learning Automata: Performance and ConvergencealienkanibalAinda não há avaliações
- Robot MecanumDocumento4 páginasRobot MecanumalienkanibalAinda não há avaliações
- InTech-Multi Automata LearningDocumento21 páginasInTech-Multi Automata LearningalienkanibalAinda não há avaliações
- Omni-Directional Walking of A Quadruped Robot: Shugen Ma, Takashi Tomiyama, Hideyuki WadaDocumento8 páginasOmni-Directional Walking of A Quadruped Robot: Shugen Ma, Takashi Tomiyama, Hideyuki WadaalienkanibalAinda não há avaliações
- Omnidirectional Static Walking of A Quadruped Robot On A SlopeDocumento2 páginasOmnidirectional Static Walking of A Quadruped Robot On A SlopealienkanibalAinda não há avaliações
- UMTS AircomDocumento20 páginasUMTS AircomDũng PhạmAinda não há avaliações
- Braun KF40 - CDocumento17 páginasBraun KF40 - CAgung UtoyoAinda não há avaliações
- RequirementsDocumento18 páginasRequirementsmpedraza-1Ainda não há avaliações
- Web 2.0: Dynamic Web PagesDocumento12 páginasWeb 2.0: Dynamic Web PagesAra PantaleonAinda não há avaliações
- Man 2563XX 07Documento232 páginasMan 2563XX 07trance1313Ainda não há avaliações
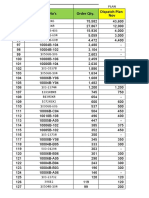
- Order Qty Vs Dispatch Plan - 04 11 20Documento13 páginasOrder Qty Vs Dispatch Plan - 04 11 20NPD1 JAKAPAinda não há avaliações
- Iftekhar Sea Service TestimonialDocumento2 páginasIftekhar Sea Service TestimonialTomenko OleksiiAinda não há avaliações
- 27C ChainDocumento19 páginas27C ChainyanaziAinda não há avaliações
- David Lowe Thesis PDFDocumento201 páginasDavid Lowe Thesis PDFKRISHNA VAMSHIAinda não há avaliações
- Kinematics-03-Subjective SolvedDocumento11 páginasKinematics-03-Subjective SolvedRaju SinghAinda não há avaliações
- Solar Module CellDocumento4 páginasSolar Module CellVinod BabhaleAinda não há avaliações
- KST GlueTech 44 enDocumento80 páginasKST GlueTech 44 enLeandro RadamesAinda não há avaliações
- 4.10) Arch Shaped Self Supporting Trussless Roof SpecificationsDocumento11 páginas4.10) Arch Shaped Self Supporting Trussless Roof Specificationshebh123100% (1)
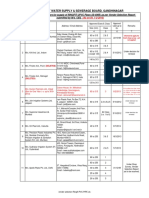
- GWSSB Vendor List 19.11.2013Documento18 páginasGWSSB Vendor List 19.11.2013sivesh_rathiAinda não há avaliações
- Waqas Riaz: Total Years of Experience: 2 Years ObjectiveDocumento2 páginasWaqas Riaz: Total Years of Experience: 2 Years ObjectiveIrfanAinda não há avaliações
- Slope Stability in Slightly Fissured Claystones and MarlsDocumento25 páginasSlope Stability in Slightly Fissured Claystones and MarlsrullyirwandiAinda não há avaliações
- Alien Vault Lab2Documento28 páginasAlien Vault Lab2DukeAinda não há avaliações