Você também pode gostar
- Primeros Tanques de Concreto Presforzado en México - RecuentoDocumento6 páginasPrimeros Tanques de Concreto Presforzado en México - Recuentoroberto ortegaAinda não há avaliações
- Estación Hidrométrica ChuquicaraDocumento1 páginaEstación Hidrométrica ChuquicaraGustazx HiViAinda não há avaliações
- Algunas Tendencias Del Concreto EstructuralDocumento6 páginasAlgunas Tendencias Del Concreto EstructuralAlejandro RodríguezAinda não há avaliações
- Memoria Calculo Microp. D100 N-80 73X7 MMDocumento16 páginasMemoria Calculo Microp. D100 N-80 73X7 MMRaul Martinez JardonAinda não há avaliações
- Obras VigaceroDocumento55 páginasObras VigaceroJordy Vertiz100% (1)
- Diseño de Puente T3 S3Documento46 páginasDiseño de Puente T3 S3Sergio Estrada PerezAinda não há avaliações
- Mathcad - EJEMPLO Vibraciones 2016-IDocumento20 páginasMathcad - EJEMPLO Vibraciones 2016-IJ Rivera AlfaroAinda não há avaliações
- Memorias de Cálculo EstructuralDocumento8 páginasMemorias de Cálculo EstructuralJhon Freddy RAinda não há avaliações
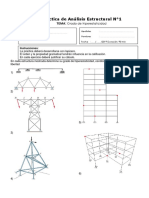
- Practica Calificada Grados de HiperestaticidadDocumento1 páginaPractica Calificada Grados de Hiperestaticidadafa35Ainda não há avaliações
- 1478-Memoria de Calculo-Hotel Volt-Provenza-Medellin PDFDocumento308 páginas1478-Memoria de Calculo-Hotel Volt-Provenza-Medellin PDFcarangoretrepoAinda não há avaliações
- Acu-Instalaciones SaniDocumento59 páginasAcu-Instalaciones SaniOscar SanchezAinda não há avaliações
- Ejercicio 1 - Nonlin V8 - Alva Reyes JuniorDocumento14 páginasEjercicio 1 - Nonlin V8 - Alva Reyes JuniorJunior AlReAinda não há avaliações
- Especificaciones Tecnicas MurosDocumento10 páginasEspecificaciones Tecnicas MurosJaime NainAinda não há avaliações
- Taller 1 - v1 - SubDocumento3 páginasTaller 1 - v1 - SubAndres HernandezAinda não há avaliações
- Memoria de Calculo IDocumento55 páginasMemoria de Calculo Iingcivilrodrigo68Ainda não há avaliações
- Traduccion Atc - 40Documento10 páginasTraduccion Atc - 40Miguel Pacheco PalominoAinda não há avaliações
- Perez Neyra Carlos Analisis Estructural DiseñoDocumento106 páginasPerez Neyra Carlos Analisis Estructural DiseñoCarlos Andres Correa ReyesAinda não há avaliações
- Memoria Estructural ColiseoDocumento31 páginasMemoria Estructural ColiseoalvinAinda não há avaliações
- Plantilla-Memoria-Albanileria-Armada (Es Confinada Pero Sirve de Plantilla)Documento18 páginasPlantilla-Memoria-Albanileria-Armada (Es Confinada Pero Sirve de Plantilla)nicolas contrerasAinda não há avaliações
- CoberturaDocumento2 páginasCoberturaWashington Mercado CcorimanyaAinda não há avaliações
- Mathcad - Puente - HºPºDocumento21 páginasMathcad - Puente - HºPºGonzalo AlcazarAinda não há avaliações
- Memoria de Calculo EstructuralDocumento14 páginasMemoria de Calculo EstructuralrcqrubenAinda não há avaliações
- Interaccion Suelo EstructuraDocumento24 páginasInteraccion Suelo EstructuraSantiago PerezAinda não há avaliações
- Concepto Geotécnico Vivienda de 1 Nivel Vereda Piedras Blancas Lote 180 - GuarneDocumento12 páginasConcepto Geotécnico Vivienda de 1 Nivel Vereda Piedras Blancas Lote 180 - GuarneDonaldo CarmonaAinda não há avaliações
- Analisis Etabs DesplazamientosDocumento1 páginaAnalisis Etabs Desplazamientosoggy43Ainda não há avaliações
- SismicaDocumento12 páginasSismicajose martosAinda não há avaliações
- Uso Del Programa CAST PDFDocumento27 páginasUso Del Programa CAST PDFValentina WoolvettAinda não há avaliações
- Modelo de Memoria de Calculo Albañileria Confinada - Modulo EducativoDocumento29 páginasModelo de Memoria de Calculo Albañileria Confinada - Modulo EducativoluffiM13Ainda não há avaliações
- Piscina FinalDocumento6 páginasPiscina FinalSanty RuizAinda não há avaliações
- Vigas Doblemente ReforzadasDocumento5 páginasVigas Doblemente ReforzadasJerson Vargas ValeraAinda não há avaliações
- Proceso Constructivo de Losa de Concreto ArmadoDocumento13 páginasProceso Constructivo de Losa de Concreto ArmadoDaniel Alberto VázquezAinda não há avaliações
- Memoria de Cálculo-Bloque 1Documento16 páginasMemoria de Cálculo-Bloque 1Boris Bustamante MoraAinda não há avaliações
- PDF Modelos Constitutivos Del Hormigon DDDocumento7 páginasPDF Modelos Constitutivos Del Hormigon DDBryan SolizAinda não há avaliações
- Carga Ultima Según E031Documento3 páginasCarga Ultima Según E031NABUCODONOSOR TobiasAinda não há avaliações
- Memoria de Cálculos Titulo eDocumento12 páginasMemoria de Cálculos Titulo eJhefferson Adrian Jiménez CuervoAinda não há avaliações
- Construcción Con Bloques de Hormigón de Cemento PortlandDocumento11 páginasConstrucción Con Bloques de Hormigón de Cemento PortlandRodrigo Sorrequieta100% (1)
- CYPECAD Vs ETABSDocumento9 páginasCYPECAD Vs ETABSJavierLlanosAinda não há avaliações
- Dinámica EstructuralDocumento1 páginaDinámica EstructuralFrank Soto MendezAinda não há avaliações
- Factor de Redundancia EstructuralDocumento120 páginasFactor de Redundancia EstructuralAndrea Vivianna Alcalá ValcárcelAinda não há avaliações
- Escaleras, Rampas, Andamios y Plataformas de TrabajoDocumento3 páginasEscaleras, Rampas, Andamios y Plataformas de Trabajoangel_machacaAinda não há avaliações
- Rehabilitación de Estructuras de Acuerdo Con La en 1504 - Ing. Miguel Perilla PDFDocumento150 páginasRehabilitación de Estructuras de Acuerdo Con La en 1504 - Ing. Miguel Perilla PDFJavier Andres PiñeresAinda não há avaliações
- PDF Memoria de Calculo Totem Publicitariopdf - CompressDocumento29 páginasPDF Memoria de Calculo Totem Publicitariopdf - CompressMichelt RefAinda não há avaliações
- LadrillosDocumento19 páginasLadrillosFrank Cosar SotoAinda não há avaliações
- "Evaluación Puente " Por El Métodoaashto - LRFD"Documento235 páginas"Evaluación Puente " Por El Métodoaashto - LRFD"Jaime Coronell100% (1)
- Memoria de Calculo Estructural-Residencia MorenoDocumento58 páginasMemoria de Calculo Estructural-Residencia MorenoIngenieria DerechoAinda não há avaliações
- Vigas de ArriostreDocumento14 páginasVigas de ArriostreJuan QuispeAinda não há avaliações
- Herramientas de Analisis Computacional de Estructuras 01Documento26 páginasHerramientas de Analisis Computacional de Estructuras 01Toño Cordova VelaAinda não há avaliações
- Memoria Diseño Edificio EncantoDocumento24 páginasMemoria Diseño Edificio EncantoJairo CalderonAinda não há avaliações
- Sistema de Muros de Ductilidad LimitadaDocumento3 páginasSistema de Muros de Ductilidad LimitadaTatiana Peña MendozaAinda não há avaliações
- FolletoarcotechosDocumento22 páginasFolletoarcotechosVictor Jesus Espinosa100% (2)
- E 031 PDFDocumento21 páginasE 031 PDFSaenz RuthAinda não há avaliações
- Ar - 22 SMIE PDFDocumento12 páginasAr - 22 SMIE PDFDenis MAAinda não há avaliações
- Ficha Técnica Tyfo Sch-41 s1 Composite FyfeDocumento4 páginasFicha Técnica Tyfo Sch-41 s1 Composite FyfeAlfredo Garcia VillenaAinda não há avaliações
- Aislamiento de Base en Estructuras - 1Documento100 páginasAislamiento de Base en Estructuras - 1Jampiere Melendrez DezaAinda não há avaliações
- Mathcad - Calculo Empuje ActivoDocumento1 páginaMathcad - Calculo Empuje ActivoEmerson Rodriguez RodriguezAinda não há avaliações
- Mathcad - Analisis Modal Modo 3Documento8 páginasMathcad - Analisis Modal Modo 3ing_jhon_franzAinda não há avaliações
- Mas AmortiguadoDocumento6 páginasMas AmortiguadoYesid Cortes50% (2)
- Vibración Libre - Dinámica EstructuralDocumento10 páginasVibración Libre - Dinámica EstructuralMario Covarrubias NavarroAinda não há avaliações
- Momento de Curvatura - Metodo AproximadoDocumento5 páginasMomento de Curvatura - Metodo AproximadoYamil Sullcaccori Huaman100% (1)
- Correcion-De La Unidad 1Documento11 páginasCorrecion-De La Unidad 1Eduardo EscobarAinda não há avaliações
- Exposicion TesisDocumento22 páginasExposicion TesisAlexis MasamiAinda não há avaliações
- Check List de Creación de EmpresaDocumento6 páginasCheck List de Creación de EmpresaAlexis MasamiAinda não há avaliações
- 01 Etabs Final 2018Documento4 páginas01 Etabs Final 2018Juan C QPAinda não há avaliações
- Examen Resuelto AceroDocumento9 páginasExamen Resuelto AceroAlexis MasamiAinda não há avaliações
- Primer Examen de Dise o en Acero y Madera 2019Documento4 páginasPrimer Examen de Dise o en Acero y Madera 2019Alexis Masami100% (1)
- Primer Examen Antisismica 2019 0Documento4 páginasPrimer Examen Antisismica 2019 0Alexis MasamiAinda não há avaliações
- Burj Khalifa 1Documento36 páginasBurj Khalifa 1Alexis Masami100% (1)
- Determinacion Experimental Del AmortiguamientoDocumento19 páginasDeterminacion Experimental Del AmortiguamientoAlexis MasamiAinda não há avaliações
- Presa de Las Tres Gargantas-ConstruccionDocumento43 páginasPresa de Las Tres Gargantas-ConstruccionAlexis Masami86% (7)
- 6 Movimiento Vertical de Caida LibreDocumento5 páginas6 Movimiento Vertical de Caida LibrecinthyaAinda não há avaliações
- E (1) - Fliess - Estabilidad Tomo I PDFDocumento680 páginasE (1) - Fliess - Estabilidad Tomo I PDFMica Ríos Del Castillo100% (2)
- Sartre y La Fenomenología de HusserlDocumento6 páginasSartre y La Fenomenología de HusserlLicdo Miguel Antonio OrtizAinda não há avaliações
- FísicaDocumento4 páginasFísicaJoana GonzalezAinda não há avaliações
- Informe Laboratorio Cristancho y SebastianDocumento6 páginasInforme Laboratorio Cristancho y SebastianFelipe CristanchoAinda não há avaliações
- Agujeros NegrosDocumento3 páginasAgujeros NegrosjuainesAinda não há avaliações
- F2 - 02 - Sistema Masa Resorte PDFDocumento2 páginasF2 - 02 - Sistema Masa Resorte PDFJorgeJiménezAinda não há avaliações
- Arenas-Otra Vez El MarDocumento188 páginasArenas-Otra Vez El MarSofi Maurette100% (2)
- La Construcción Social de La RealidadDocumento11 páginasLa Construcción Social de La RealidadJAINES VEGAAinda não há avaliações
- Banco de Preguntas-1Documento691 páginasBanco de Preguntas-1Edw Caceres67% (3)
- Definición de TelescopioDocumento2 páginasDefinición de TelescopioMari Ella CiezaAinda não há avaliações
- Tarea 9 Filosofia GeneralDocumento4 páginasTarea 9 Filosofia GeneralDavid HiraldoAinda não há avaliações
- Unidad 3 Clei 5 FilosofiaDocumento2 páginasUnidad 3 Clei 5 FilosofiaRosmeily GuillandeauxAinda não há avaliações
- Planetas y NodosDocumento168 páginasPlanetas y NodosisaAinda não há avaliações
- Negativo U Opuesto de Un Vector EsDocumento8 páginasNegativo U Opuesto de Un Vector EsMarta Fuentes LevisAinda não há avaliações
- PlanchetaDocumento24 páginasPlanchetajdcr1993100% (1)
- Comparando Los Planetas de Nuestro Sistema SolarDocumento37 páginasComparando Los Planetas de Nuestro Sistema SolarYuvitza RAinda não há avaliações
- Astrologia China BaziDocumento18 páginasAstrologia China BaziClaudio Rondan Chacon50% (2)
- El Cuerpo Sutil y Sus VariantesDocumento7 páginasEl Cuerpo Sutil y Sus VariantesjoselautaroAinda não há avaliações
- Cuestionario HechoDocumento6 páginasCuestionario HechojhonAinda não há avaliações
- El Sistema Solar para NiñosDocumento3 páginasEl Sistema Solar para NiñosseapgunsAinda não há avaliações
- El Concepto Del Universo Durante Los Siglos XVI y XVIIDocumento1 páginaEl Concepto Del Universo Durante Los Siglos XVI y XVIIGonzo Ramirez0% (1)
- Hataraku Maou-Sama Volumen 12Documento226 páginasHataraku Maou-Sama Volumen 12arraseAinda não há avaliações
- Tachyon PDFDocumento7 páginasTachyon PDF6681299Ainda não há avaliações
- Parte 2 Las Concepciones Del Cosmos en Los Originarios Americanos Sumerios Egipcios y ChinosDocumento25 páginasParte 2 Las Concepciones Del Cosmos en Los Originarios Americanos Sumerios Egipcios y ChinosAndrea ChambillaAinda não há avaliações
- Taller 3 MecanicaDocumento7 páginasTaller 3 MecanicaYubian Andres Bedoya HenaoAinda não há avaliações
- Taller de RefuerzoDocumento2 páginasTaller de RefuerzoyennyrosasAinda não há avaliações
- Programa IPC CII 2019Documento6 páginasPrograma IPC CII 2019Leonardo CardenasAinda não há avaliações
- Idealismo Vs Positivismo PDFDocumento34 páginasIdealismo Vs Positivismo PDFkarlafilian_Ainda não há avaliações